
14.1: Affine transformations
- Page ID
- 23668

Affine geometry studies the so-called incidence structure of the Euclidean plane. The incidence structure sees only which points lie on which lines and nothing else; it does not directly see distances, angle measures, and many other things.
A bijection from the Euclidean plane to itself is called affine transformation if it maps lines to lines; that is, the image of any line is a line. So we can say that affine geometry studies the properties of the Euclidean plane preserved under affine transformations.
Show that an affine transformation of the Euclidean plane sends any pair of parallel lines to a pair of parallel lines.
- Hint
-
Assume the two distinct lines \(\ell\) and \(m\) are mapped to the intersecting lines \(\ell'\) and \(m'\). Suppose that \(P'\) denotes their point of intersection.
Let \(P\) be the inverse image of \(P'\). By the definition of affine map, it has to lie on both \(\ell\) and \(m\); that is, \(\ell\) and \(m\) are intersecting. Hence the result.
The observation below follows since the lines are defined using the metric only.
Any motion of the Euclidean plane is an affine transformation.
The following exercise provides more general examples of affine transformations.
The following maps of a coordinate plane to itself are affine transformations:
(a) Shear map defined by \((x,y) \mapsto (x + k \cdot y, y)\) for a constant \(k\).
(b) Scaling defined by \((x, y) \mapsto (a \cdot x, a \cdot y)\) for a constant \(a \ne 0\).
(c) \(x\)-scaling and \(y\)-scaling defined respectively by
\((x, y) \mapsto (a \cdot x, y)\), and \((x, y) \mapsto (x, a \cdot y)\)
for a constant \(a \ne 0\).
(d) A transformation defined by
\((x, y) \mapsto (a \cdot x + b \cdot y + r, c \cdot x + d \cdot y + s)\)
for constants \(a, b, c, d, r, z\) such that the matrix \(\begin{matrix} a & b \\ c & d \end{matrix}\) is invertible.
- Hint
-
In each case check that the map is a bijection and apply Exercise 7.6.3
From the fundamental theorem of affine geometry (Theorem 14.3.1), it will follow that any affine transformation can be written in the form (d).
Recall that points are collinear if they lie on one line.
Suppose \(P\mapsto P'\) is a bijection of the Euclidean plane that maps collinear triples of points to collinear triples. Show that \(P\mapsto P'\) maps noncollinear triples to noncollinear.
Conclude that \(P\mapsto P'\) is an affine transformation.
- Hint
-
Choose a line \((AB)\).
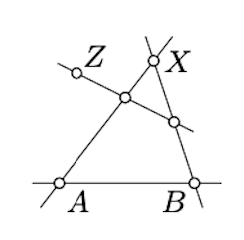
Assume that \(X' \in (A'B')\) for some \(X \not\in (AB)\). Since \(P \mapsto P'\) maps colliner points to collinear, the three lines \((AB), (AX)\), and \((BX)\) are mapped to \((A'B')\). Further, any line that connects a pair of points on these three lines is also mapped to \((A'B')\). Use it to show that the whole plane is mapped to \((A'B')\). The latter contradicts that the map is a bijection.
By assumption, if \(X \in (AB)\), then \(X' \in (A'B')\). Form above the converse holds as well. Use it to prove the second statement.