
4.6: Parametric Lines
- Page ID
- 14522

- Find the vector and parametric equations of a line.
We can use the concept of vectors and points to find equations for arbitrary lines in \(\mathbb{R}^n\), although in this section the focus will be on lines in \(\mathbb{R}^3\).
To begin, consider the case \(n=1\) so we have \(\mathbb{R}^{1}=\mathbb{R}\). There is only one line here which is the familiar number line, that is \(\mathbb{R}\) itself. Therefore it is not necessary to explore the case of \(n=1\) further.
Now consider the case where \(n=2\), in other words \(\mathbb{R}^2\). Let \(P\) and \(P_0\) be two different points in \(\mathbb{R}^{2}\) which are contained in a line \(L\). Let \(\vec{p}\) and \(\vec{p_0}\) be the position vectors for the points \(P\) and \(P_0\) respectively. Suppose that \(Q\) is an arbitrary point on \(L\). Consider the following diagram.
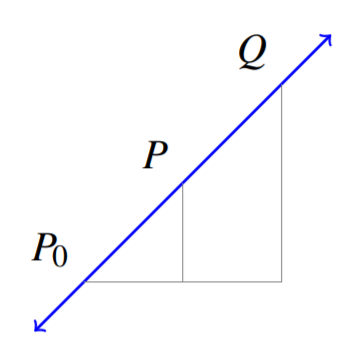
Our goal is to be able to define \(Q\) in terms of \(P\) and \(P_0\). Consider the vector \(\overrightarrow{P_0P} = \vec{p} - \vec{p_0}\) which has its tail at \(P_0\) and point at \(P\). If we add \(\vec{p} - \vec{p_0}\) to the position vector \(\vec{p_0}\) for \(P_0\), the sum would be a vector with its point at \(P\). In other words, \[\vec{p} = \vec{p_0} + (\vec{p} - \vec{p_0})\nonumber \]
Now suppose we were to add \(t(\vec{p} - \vec{p_0})\) to \(\vec{p}\) where \(t\) is some scalar. You can see that by doing so, we could find a vector with its point at \(Q\). In other words, we can find \(t\) such that \[\vec{q} = \vec{p_0} + t \left( \vec{p}- \vec{p_0}\right)\nonumber \]
This equation determines the line \(L\) in \(\mathbb{R}^2\). In fact, it determines a line \(L\) in \(\mathbb{R}^n\). Consider the following definition.
Suppose a line \(L\) in \(\mathbb{R}^{n}\) contains the two different points \(P\) and \(P_0\). Let \(\vec{p}\) and \(\vec{p_0}\) be the position vectors of these two points, respectively. Then, \(L\) is the collection of points \(Q\) which have the position vector \(\vec{q}\) given by \[\vec{q}=\vec{p_0}+t\left( \vec{p}-\vec{p_0}\right)\nonumber \] where \(t\in \mathbb{R}\).
Let \(\vec{d} = \vec{p} - \vec{p_0}\). Then \(\vec{d}\) is the direction vector for \(L\) and the vector equation for \(L\) is given by \[\vec{p}=\vec{p_0}+t\vec{d}, t\in\mathbb{R}\nonumber \]
Note that this definition agrees with the usual notion of a line in two dimensions and so this is consistent with earlier concepts. Consider now points in \(\mathbb{R}^3\). If a point \(P \in \mathbb{R}^3\) is given by \(P = \left( x,y,z \right)\), \(P_0 \in \mathbb{R}^3\) by \(P_0 = \left( x_0, y_0, z_0 \right)\), then we can write \[\left[ \begin{array}{c} x \\ y \\ z \end{array} \right] = \left[ \begin{array}{c} x_0 \\ y_0 \\ z_0 \end{array} \right] + t \left[ \begin{array}{c} a \\ b \\ c \end{array} \right] \nonumber \] where \(\vec{d} = \left[ \begin{array}{c} a \\ b \\ c \end{array} \right]\). This is the vector equation of \(L\) written in component form .
The following theorem claims that such an equation is in fact a line.
Let \(\vec{a},\vec{b}\in \mathbb{R}^{n}\) with \(\vec{b}\neq \vec{0}\). Then \(\vec{x}=\vec{a}+t\vec{b},\; t\in \mathbb{R}\), is a line.
- Proof
-
Let \(\vec{x_{1}}, \vec{x_{2}} \in \mathbb{R}^n\). Define \(\vec{x_{1}}=\vec{a}\) and let \(\vec{x_{2}}-\vec{x_{1}}=\vec{b}\). Since \(\vec{b} \neq \vec{0}\), it follows that \(\vec{x_{2}}\neq \vec{x_{1}}.\) Then \(\vec{a}+t\vec{b}=\vec{x_{1}} + t\left( \vec{x_{2}}-\vec{x_{1}}\right)\). It follows that \(\vec{x}=\vec{a}+t\vec{b}\) is a line containing the two different points \(X_1\) and \(X_2\) whose position vectors are given by \(\vec{x}_1\) and \(\vec{x}_2\) respectively.
We can use the above discussion to find the equation of a line when given two distinct points. Consider the following example.
Find a vector equation for the line through the points \(P_0 = \left( 1,2,0\right)\) and \(P = \left( 2,-4,6\right).\)
Solution
We will use the definition of a line given above in Definition \(\PageIndex{1}\) to write this line in the form
\[\vec{q}=\vec{p_0}+t\left( \vec{p}-\vec{p_0}\right)\nonumber \]
Let \(\vec{q} = \left[ \begin{array}{c} x \\ y \\ z \end{array} \right]B\). Then, we can find \(\vec{p}\) and \(\vec{p_0}\) by taking the position vectors of points \(P\) and \(P_0\) respectively. Then,
\[\vec{q}=\vec{p_0}+t\left( \vec{p}-\vec{p_0}\right)\nonumber \] can be written as
\[\left[ \begin{array}{c} x \\ y \\ z \\ \end{array} \right]B = \left[ \begin{array}{c} 1 \\ 2 \\ 0 \end{array} \right]B + t \left[ \begin{array}{r} 1 \\ -6 \\ 6 \end{array} \right]B, \;t\in \mathbb{R}\nonumber \]
Here, the direction vector \(\left[ \begin{array}{r} 1 \\ -6 \\ 6 \end{array} \right]B\) is obtained by \(\vec{p} - \vec{p_0} = \left[ \begin{array}{r} 2 \\ -4 \\ 6 \end{array} \right]B - \left[ \begin{array}{r} 1 \\ 2 \\ 0 \end{array} \right]B\) as indicated above in Definition \(\PageIndex{1}\).
Notice that in the above example we said that we found “a” vector equation for the line, not “the” equation. The reason for this terminology is that there are infinitely many different vector equations for the same line. To see this, replace \(t\) with another parameter, say \(3s.\) Then you obtain a different vector equation for the same line because the same set of points is obtained.
In Example \(\PageIndex{1}\), the vector given by \(\left[ \begin{array}{r} 1 \\ -6 \\ 6 \end{array} \right]B\) is the direction vector defined in Definition \(\PageIndex{1}\). If we know the direction vector of a line, as well as a point on the line, we can find the vector equation.
Consider the following example.
Find a vector equation for the line which contains the point \(P_0 = \left( 1,2,0\right)\) and has direction vector \(\vec{d} = \left[ \begin{array}{c} 1 \\ 2 \\ 1 \end{array} \right]B\)
Solution
We will use Definition \(\PageIndex{1}\) to write this line in the form \(\vec{p}=\vec{p_0}+t\vec{d},\; t\in \mathbb{R}\). We are given the direction vector \(\vec{d}\). In order to find \(\vec{p_0}\), we can use the position vector of the point \(P_0\). This is given by \(\left[ \begin{array}{c} 1 \\ 2 \\ 0 \end{array} \right]B.\) Letting \(\vec{p} = \left[ \begin{array}{c} x \\ y \\ z \end{array} \right]B\), the equation for the line is given by \[\left[ \begin{array}{c} x \\ y \\ z \end{array} \right]B = \left[ \begin{array}{c} 1 \\ 2 \\ 0 \end{array} \right]B + t \left[ \begin{array}{c} 1 \\ 2 \\ 1 \end{array} \right]B, \;t\in \mathbb{R} \label{vectoreqn}\]
We sometimes elect to write a line such as the one given in \(\eqref{vectoreqn}\) in the form \[\begin{array}{ll} \left. \begin{array}{l} x=1+t \\ y=2+2t \\ z=t \end{array} \right\} & \mbox{where} \; t\in \mathbb{R} \end{array} \label{parameqn}\] This set of equations give the same information as \(\eqref{vectoreqn}\), and is called the parametric equation of the line.
Consider the following definition.
Let \(L\) be a line in \(\mathbb{R}^3\) which has direction vector \(\vec{d} = \left[ \begin{array}{c} a \\ b \\ c \end{array} \right]B\) and goes through the point \(P_0 = \left( x_0, y_0, z_0 \right)\). Then, letting \(t\) be a parameter, we can write \(L\) as \[\begin{array}{ll} \left. \begin{array}{c} x = x_0 + ta \\ y = y_0 + tb \\ z = z_0 + tc \end{array} \right\} & \mbox{where} \; t\in \mathbb{R} \end{array}\nonumber \] This is called a parametric equation of the line \(L\).
You can verify that the form discussed following Example \(\PageIndex{2}\) in equation \(\eqref{parameqn}\) is of the form given in Definition \(\PageIndex{2}\).
There is one other form for a line which is useful, which is the symmetric form. Consider the line given by \(\eqref{parameqn}\). You can solve for the parameter \(t\) to write \[\begin{array}{l} t=x-1 \\ t=\frac{y-2}{2} \\ t=z \end{array}\nonumber \] Therefore, \[x-1=\frac{y-2}{2}=z\nonumber \] This is the symmetric form of the line.
In the following example, we look at how to take the equation of a line from symmetric form to parametric form.
Suppose the symmetric form of a line is \[\frac{x-2}{3}=\frac{y-1}{2}=z+3\nonumber \] Write the line in parametric form as well as vector form.
Solution
We want to write this line in the form given by Definition \(\PageIndex{2}\). This is of the form \[\begin{array}{ll} \left. \begin{array}{c} x = x_0 + ta \\ y = y_0 + tb \\ z = z_0 + tc \end{array} \right\} & \mbox{where} \; t\in \mathbb{R} \end{array}\nonumber \]
Let \(t=\frac{x-2}{3},t=\frac{y-1}{2}\) and \(t=z+3\), as given in the symmetric form of the line. Then solving for \(x,y,z,\) yields \[\begin{array}{ll} \left. \begin{array}{c} x=2 + 3t \\ y=1 + 2t \\ z=-3 + t \end{array} \right\} & \mbox{with} \;t\in \mathbb{R} \end{array}\nonumber \]
This is the parametric equation for this line.
Now, we want to write this line in the form given by Definition \(\PageIndex{1}\). This is the form \[\vec{p}=\vec{p_0}+t\vec{d}\nonumber\] where \(t\in \mathbb{R}\). This equation becomes \[\left[ \begin{array}{c} x \\ y \\ z \end{array} \right]B = \left[ \begin{array}{r} 2 \\ 1 \\ -3 \end{array} \right]B + t \left[ \begin{array}{r} 3 \\ 2 \\ 1 \end{array} \right]B, \;t\in \mathbb{R}\nonumber \]