
3.0: Prelude to Linear Transformations and Matrix Algebra
- Page ID
- 78171
Suppose you are building a robot arm with three joints that can move its hand around a plane, as in the following picture.
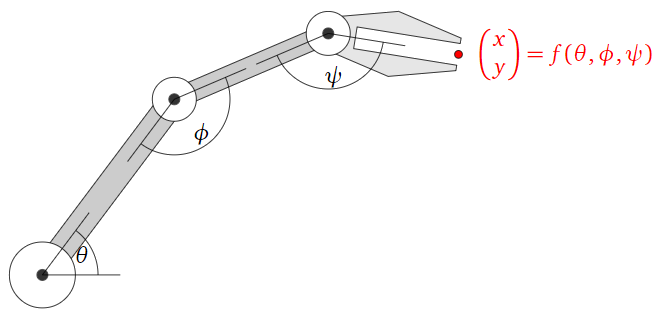
Figure \(\PageIndex{1}\)
Define a transformation \(f\) as follows: \(f(\theta,\phi,\psi)\) is the \((x,y)\) position of the hand when the joints are rotated by angles \(\theta, \phi, \psi\text{,}\) respectively. The output of \(f\) tells you where the hand will be on the plane when the joints are set at the given input angles.
Unfortunately, this kind of function does not come from a matrix, so one cannot use linear algebra to answer questions about this function. In fact, these functions are rather complicated; their study is the subject of inverse kinematics.
In this chapter, we will be concerned with the relationship between matrices and transformations. In Section 3.1, we will consider the equation \(b = Ax\) as a function with independent variable \(x\) and dependent variable \(b\text{,}\) and we draw pictures accordingly. We spend some time studying transformations in the abstract, and asking questions about a transformation, like whether it is one-to-one and/or onto (Section 3.2). In Section 3.3 we will answer the question: “when exactly can a transformation be expressed by a matrix?” We then present matrix multiplication as a special case of composition of transformations (Section 3.4). This leads to the study of matrix algebra: that is, to what extent one can do arithmetic with matrices in the place of numbers. With this in place, we learn to solve matrix equations by dividing by a matrix in Section 3.5.
\usetikzlibrary{ipe} \usetikzlibrary{angles} \tikzstyle{ipe stylesheet} = [ ipe import, even odd rule, line join=round, line cap=butt, ipe pen normal/.style={line width=0.4}, ipe pen heavier/.style={line width=0.8}, ipe pen fat/.style={line width=1.2}, ipe pen ultrafat/.style={line width=2}, ipe pen normal, ipe mark normal/.style={ipe mark scale=3}, ipe mark large/.style={ipe mark scale=5}, ipe mark small/.style={ipe mark scale=2}, ipe mark tiny/.style={ipe mark scale=1.1}, ipe mark normal, /pgf/arrow keys/.cd, ipe arrow normal/.style={scale=7}, ipe arrow large/.style={scale=10}, ipe arrow small/.style={scale=5}, ipe arrow tiny/.style={scale=3}, ipe arrow normal, /tikz/.cd, ipe arrows, % update arrows <->/.tip = ipe normal, ipe dash normal/.style={dash pattern=}, ipe dash dashed/.style={dash pattern=on 4bp off 4bp}, ipe dash dotted/.style={dash pattern=on 1bp off 3bp}, ipe dash dash dotted/.style={dash pattern=on 4bp off 2bp on 1bp off 2bp}, ipe dash dash dot dotted/.style={dash pattern=on 4bp off 2bp on 1bp off 2bp on 1bp off 2bp}, ipe dash normal, ipe node/.append style={font=\normalsize}, ipe stretch normal/.style={ipe node stretch=1}, ipe stretch normal, ipe opacity 10/.style={opacity=0.1}, ipe opacity 30/.style={opacity=0.3}, ipe opacity 50/.style={opacity=0.5}, ipe opacity 75/.style={opacity=0.75}, ipe opacity opaque/.style={opacity=1}, ipe opacity opaque, ] \begin{tikzpicture}[ipe stylesheet, scale=.7] \draw[fill=white!80!black] (100, 528) -- (196, 656) -- (220, 656) -- (124, 528) -- cycle; \draw[fill=white!80!black] (208, 664) -- (320, 712) -- (320, 696) -- (208, 648) -- cycle; \begin{scope}[shift={(321.91, 715.847)}, rotate=-9.1623] \draw[fill=white!90!black] (0, 0) -- (48, 12) -- (96, 0) -- (96, -4) -- (20, -4) -- (20, -20) -- (96, -20) -- (96, -24) -- (48, -36) -- (0, -24) -- cycle; \draw[fill=red] (96, -12) circle[radius=1mm] node[right=2mm, red] {$\vec{x y} = f(\theta,\phi,\psi)$}; \end{scope} \filldraw[fill=white] (208, 656) circle[radius=16]; \filldraw[fill=white] (320, 704) circle[radius=16]; \filldraw[fill=white] (112, 528) circle[radius=24]; \filldraw[white!20!black] (112, 528) circle[radius=4] (208, 656) circle[radius=4] (320, 704) circle[radius=4]; \coordinate (c1) at (112, 528); \coordinate (c2) at (208, 656); \coordinate (c3) at (320, 704); \coordinate (x1) at ($(c1) + (2cm,0)$); \coordinate (x3) at ($(c3) + (2cm,0)$); \draw (c1) -- (x1); \draw (c1) -- ($(c1)!2cm!(c2)$); \pic[draw, "$\theta$", angle radius=1cm, angle eccentricity=.8] {angle=x1--c1--c2}; \draw (c2) -- ($(c2)!2cm!(c1)$); \draw (c2) -- ($(c2)!2cm!(c3)$); \pic[draw, "$\phi$", angle radius=1cm, angle eccentricity=.8] {angle=c1--c2--c3}; \coordinate (x3p) at ($(c3)!2cm!-9.1623:(x3)$); \draw (c3) -- ($(c3)!2cm!(c2)$); \draw (c3) -- (x3p); \pic[draw, "$\psi$", angle radius=1cm, angle eccentricity=.8] {angle=c2--c3--x3p}; \end{tikzpicture}