
2.4: Directional Derivatives and the Gradient
- Page ID
- 2253

For a function \(z = f (x, y)\), we learned that the partial derivatives \(\dfrac{∂f}{∂x}\text{ and} \dfrac{∂f}{∂y}\) represent the (instantaneous) rate of change of \(f\) in the positive \(x\) and \(y\) directions, respectively. What about other directions? It turns out that we can find the rate of change in any direction using a more general type of derivative called a directional derivative.
Definition 2.5: directional derivative
Let \(f (x, y)\) be a real-valued function with domain \(D\) in \(\mathbb{R}^2\), and let \((a,b)\) be a point in \(D\). Let \(\textbf{v}\) be a unit vector in \(\mathbb{R}^2\). Then the directional derivative of \(\textbf{f}\) at \(\mathbf{(a,b)}\) in the direction of \(\mathbf{v}\), denoted by \(D_v f(a,b)\), is defined as
\[D_v f(a,b)=\lim \limits_{h \to 0}\dfrac{f((a,b)+h\textbf{v})-f(a,b)}{h}\label{Eq2.8}\]
Notice in the definition that we seem to be treating the point \((a,b)\) as a vector, since we are adding the vector \(h\textbf{v}\) to it. But this is just the usual idea of identifying vectors with their terminal points, which the reader should be used to by now. If we were to write the vector \(\textbf{v}\) as \(\textbf{v} = (v_1 ,v_2)\), then
\[D_v f (a,b)=\lim \limits_{h \to 0}\dfrac{f (a+ hv_1 ,b + hv_2)− f (a,b)}{h}\label{Eq2.9}\]
From this we can immediately recognize that the partial derivatives \(\dfrac{∂f}{∂x}\text{ and} \dfrac{∂f}{∂y}\) are special cases of the directional derivative with \(\textbf{v} = \textbf{i} = (1,0)\text{ and } \textbf{v} = \textbf{j} = (0,1)\), respectively. That is, \(\dfrac{∂f}{∂x} = D_i f\text{ and } \dfrac{∂f}{∂y} = D_j f\). Since there are many vectors with the same direction, we use a unit vector in the definition, as that represents a “standard” vector for a given direction.
If \(f (x, y)\) has continuous partial derivatives \(\dfrac{∂f}{∂x}\text{ and }\dfrac{∂f}{∂y}\) (which will always be the case in this text), then there is a simple formula for the directional derivative:
Theorem 2.2
Let \(f (x, y)\) be a real-valued function with domain \(D\) in \(\mathbb{R}^2\) such that the partial derivatives \(\dfrac{∂f}{∂x}\text{ and }\dfrac{∂f}{∂y}\) exist and are continuous in \(D\). Let \((a,b)\) be a point in \(D\), and let \(\textbf{v} = (v_1 ,v_2)\) be a unit vector in \(\mathbb{R}^2\). Then
\[D_v f (a,b) = v_1 \dfrac{∂f}{∂x} (a,b)+ v_2 \dfrac{∂f}{∂y} (a,b)\label{Eq2.10}\]
Proof: Note that if \(\textbf{v} = \textbf{i}\) = (1,0) then the above formula reduces to \(D_v f (a,b) = \dfrac{∂f}{∂x} (a,b)\), which we know is true since \(D_i f = \dfrac{∂f}{∂x}\), as we noted earlier. Similarly, for \(\textbf{v} = \textbf{j} = (0,1)\) the formula reduces to \(D_v f (a,b) = \dfrac{∂f}{∂y} (a,b)\), which is true since \(D_j f = \dfrac{∂f}{∂y}\). So since \(\textbf{i} = (1,0)\text{ and }\textbf{j} = (0,1)\) are the only unit vectors in \(\mathbb{R}^2\) with a zero component, then we need only show the formula holds for unit vectors \(\textbf{v} = (v_1 ,v_2)\text{ with }v_1 \neq 0 \text{ and }v_2 \neq 0\). So fix such a vector \(\textbf{v}\) and fix a number \(h \neq 0\).
Then
\[ f (a+ hv_1 ,b + hv_2)− f (a,b) = f (a+ hv_1 ,b + hv_2)− f (a+ hv_1 ,b)+ f (a+ hv_1 ,b)− f (a,b)\label{Eq2.11}\]
Since \(h \neq 0 \text{ and }v_2 \neq 0\), then \(hv_2 \neq 0\) and thus any number \(c\) between \(b \text{ and }b + hv_2\) can be written as \(c = b+\alpha hv_2\) for some number \(0 < \alpha < 1\). So since the function \(f (a+hv_1 , y)\) is a realvalued function of \(y\) (since \(a + hv_1\) is a fixed number), then the Mean Value Theorem from single-variable calculus can be applied to the function \(g(y) = f (a + hv_1 , y)\) on the interval \([b,b + hv_2]\) (or \([b + hv_2 ,b]\) if one of \(h \text{ or }v_2\) is negative) to find a number \(0 < \alpha < 1\) such that
\[\nonumber \dfrac{∂f}{∂y} (a+ hv_1 ,b +\alpha hv_2) = g ′ (b +\alpha hv_2)=\dfrac{g(b + hv_2)− g(b)}{b + hv_2 − b}=\dfrac{f (a+ hv_1 ,b + hv_2)− f (a+ hv_1 ,b)}{hv_2}\]
and so
\[\nonumber f (a+ hv_1 ,b + hv_2)− f (a+ hv_1 ,b) = hv_2 \dfrac{∂f}{∂y} (a+ hv_1 ,b +\alpha hv_2) .\]
By a similar argument, there exists a number \(0 < \beta < 1\) such that
\[\nonumber f (a+ hv_1 ,b)− f (a,b) = hv_1 \dfrac{∂f}{∂x} (a+\beta hv_1 ,b) .\]
Thus, by Equation \ref{Eq2.11}, we have
\[\nonumber \begin{align} \dfrac{f (a+ hv_1 ,b + hv_2)− f (a,b)}{h}&=\dfrac{hv_2 \dfrac{∂f}{∂y} (a+ hv_1 ,b +\alpha hv_2)+ hv_1 \dfrac{∂f}{∂x} (a+\beta hv_1 ,b)}{h} \\[4pt] \nonumber &=v_2 \dfrac{∂f}{∂y} (a+ hv_1 ,b +\alpha hv_2)+ v_1 \dfrac{∂f}{∂x} (a+\beta hv_1 ,b)\end{align}\]
so by Equation \ref{Eq2.9} we have
\[ \nonumber \begin{align} D_v f (a,b)&=\lim \limits_{h \to 0}\dfrac{f (a+ hv_1 ,b + hv_2)− f (a,b)}{h} \\[4pt] \nonumber &=\lim \limits_{h \to 0}\left [v_2 \dfrac{∂f}{∂y} (a+ hv_1 ,b +\alpha hv_2)+ v_1 \dfrac{∂f}{∂x} (a+\beta hv_1 ,b)\right ] \\[4pt] \nonumber &= v_2 \dfrac{∂f}{∂y} (a,b)+ v_1 \dfrac{∂f}{∂x} (a,b) \text{ by the continuity of } \dfrac{∂f}{∂x} \text{ and } \dfrac{∂f}{∂y}\text{, so} \\[4pt] \nonumber D_v f (a,b) &= v_1 \dfrac{∂f}{∂x} (a,b)+ v_2 \dfrac{∂f}{∂y} (a,b) \end{align}\]
\[\nonumber \text{after reversing the order of summation.}\tag{\(\textbf{QED}\)}\]
Note that \(D_v f (a,b) = v \cdot \left (\dfrac{∂f}{∂x} (a,b), \dfrac{∂f}{∂y} (a,b) \right )\). The second vector has a special name:
Definition 2.6
For a real-valued function \(f (x, y)\), the gradient of \(f\), denoted by \(\nabla f\), is the vector
\[\nabla f =\left ( \dfrac{∂f}{∂x} , \dfrac{∂f}{∂y} \right ) \label{Eq2.12}\]
in \(\mathbb{R}^2\). For a real-valued function \(f (x, y, z)\), the gradient is the vector
\[\nabla f = \left ( \dfrac{∂f}{∂x} , \dfrac{∂f}{∂y} , \dfrac{∂f}{∂z}\right ) \label{Eq2.13}\]
in \(\mathbb{R}^ 3\). The symbol \(\nabla\) is pronounced “del”.
Corollary 2.3
\[\nonumber D_v f = \textbf{v} \cdot \nabla f\]
Example 2.15
Find the directional derivative of \(f (x, y) = x y^2 + x^3 y\) at the point (1,2) in the direction of \(\textbf{v} = \left ( \dfrac{1}{\sqrt{2}},\dfrac{1}{\sqrt{2}}\right )\).
Solution
We see that \(\nabla f = (y^2 +3x^2 y,2x y+ x^3 )\), so
\[\nonumber D_v f (1,2) = \textbf{v}\cdot \nabla f (1,2) = \left ( \dfrac{1}{\sqrt{2}},\dfrac{1}{\sqrt{2}}\right ) \cdot (2^2 +3(1)^2 (2),2(1)(2)+1^3 ) = \dfrac{15}{\sqrt{2}}\]
A real-valued function \(z = f (x, y)\) whose partial derivatives \(\dfrac{∂f}{∂x}\text{ and }\dfrac{∂f}{∂y}\) exist and are continuous is called continuously differentiable. Assume that \(f (x, y)\) is such a function and that \(\nabla f \neq \textbf{0}\). Let \(c\) be a real number in the range of \(f\) and let \(\textbf{v}\) be a unit vector in \(\mathbb{R}^2\) which is tangent to the level curve \(f (x, y) = c\) (see Figure 2.4.1).
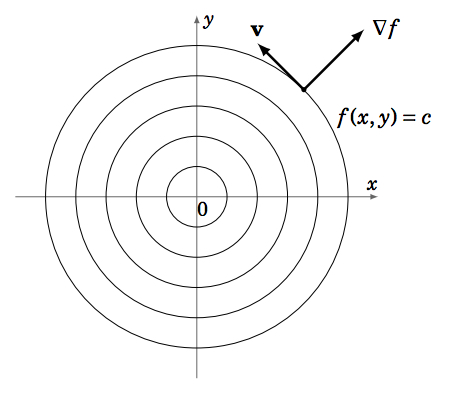
The value of \(f (x, y)\) is constant along a level curve, so since \(\textbf{v}\) is a tangent vector to this curve, then the rate of change of \(f\) in the direction of \(\textbf{v}\) is 0, i.e. \(D_v f = 0\). But we know that \(D_v f = \textbf{v} \cdot \nabla f = \left\lVert \textbf{v} \right\rVert \left\lVert \nabla f \right\rVert \cos \theta \), where \(\theta\) is the angle between \(\textbf{v} \text{ and }\nabla f\). So since \(\left\lVert \textbf{v} \right\rVert = 1 \text{ then }D_v f = \left\lVert \nabla f \right\rVert \cos \theta \). So since \(\nabla f \neq \textbf{0}\text{ then }D_v f = 0 ⇒ \cos \theta = 0 ⇒ \theta = 90^\circ\). In other words, \(\nabla f \perp \textbf{v}\), which means that \(\nabla f\) is normal to the level curve.
In general, for any unit vector \(\textbf{v}\) in \(\mathbb{R}^2\), we still have \(D_v f = \left\lVert \nabla f \right\rVert \cos \theta \text{, where }\theta\) is the angle between \(\textbf{v} \text{ and }\nabla f\). At a fixed point \((x, y)\) the length \(\left\lVert \nabla f \right\rVert\) is fixed, and the value of \(D_v f\) then varies as \(\theta\) varies. The largest value that \(D_v f\) can take is when \(\cos \theta = 1 (\theta = 0^\circ )\), while the smallest value occurs when \(\cos \theta = −1 (\theta = 180^\circ )\). In other words, the value of the function \(f\) increases the fastest in the direction of \(\nabla f\) (since \(\theta = 0^\circ\) in that case), and the value of \(f\) decreases the fastest in the direction of \(−\nabla f\) (since \(\theta = 180^\circ\) in that case). We have thus proved the following theorem:
Theorem 2.4
Let \(f (x, y)\) be a continuously differentiable real-valued function, with \(\nabla f \neq 0\). Then:
- The gradient \(\nabla f\) is normal to any level curve \(f (x, y) = c\).
- The value of \(f (x, y)\) increases the fastest in the direction of \(\nabla f\).
- The value of \(f (x, y)\) decreases the fastest in the direction of \(−\nabla f\).
Example 2.16
In which direction does the function \(f (x, y) = x y^2 + x^3 y\) increase the fastest from the point (1,2)? In which direction does it decrease the fastest?
Solution
Since \(\nabla f = (y^2 + 3x^2 y,2xy + x^3 )\), then \(\nabla f (1,2) = (10,5) \neq \textbf{0}\). A unit vector in that direction is \(\textbf{v} = \dfrac{\nabla f}{\left\lVert \nabla f \right\rVert} = \left (\dfrac{2}{\sqrt{5}} ,\dfrac{1}{\sqrt{5}}\right )\). Thus, \(f\) increases the fastest in the direction of \(\left (\dfrac{2}{\sqrt{5}} ,\dfrac{1}{\sqrt{5}}\right )\) and decreases the fastest in the direction of \(\left (\dfrac{−2}{\sqrt{5}},\dfrac{−1}{\sqrt{5}}\right )\).
Though we proved Theorem 2.4 for functions of two variables, a similar argument can be used to show that it also applies to functions of three or more variables. Likewise, the directional derivative in the three-dimensional case can also be defined by the formula \(D_v f = \textbf{v}\cdot \nabla f\).
Example 2.17
The temperature \(T\) of a solid is given by the function \(T(x, y, z) = e^−x + e^{−2y} + e^{4z}\text{, where }x, y, z\) are space coordinates relative to the center of the solid. In which direction from the point (1,1,1) will the temperature decrease the fastest?
Solution
Since \(\nabla f = (−e^{−x} ,−2e^{−2y} ,4e^{4z} )\), then the temperature will decrease the fastest in the direction of \(−\nabla f (1,1,1) = (e^{−1} ,2e^{−2} ,−4e^4 )\).