
3.3: What Can We Learn?




- Last updated
- Apr 30, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
There are several important things you can learn from phase space visualizations. First, you can tell from the phase space what will eventually happen to a system’s state in the long run. For a deterministic dynamical system, its future state is uniquely determined by its current state (hence, the name “deterministic”). Trajectories of a deterministic dynamical system will never branch off in its phase space (though they could merge), because if they did, that would mean that multiple future states were possible, which would violate the deterministic nature of the system. No branching means that, once you specify an initial state of the system, the trajectory that follows is uniquely determined too. You can visually inspect where the trajectories are going in the phase space visualization. They may diverge to infinity, converge to a certain point, or remain dynamically changing yet stay in a confined region in the phase space from which no outgoing trajectories are running out. Such a converging point or a region is called an attractor. The concept of attractors is particularly important for understanding the self-organization of complex systems. Even if it may look magical and mysterious, self-organization of complex systems can be understood as a process whereby the system is simply falling into one of the attractors in a high-dimensional phase space.
Second, you can learn how a system’s fate depends on its initial state. For each attractor, you can find the set of all the initial states from which you will eventually end up falling into that attractor. This set is called the basin of attraction of that attractor. If you have more than one attractor in the phase space (and/or if the phase space also shows divergence to infinity), you can divide the phase space into several different regions. Such a “map” drawn on the phase space reveals how sensitive the system is to its initial conditions. If one region is dominating in the phase space, the system’s fate doesn’t depend much on its initial condition. But if there are several regions that are equally represented in the phase space, the system’s fate sensitively depends on its initial condition.
Where are the attractor(s) in the phase space of the bouncing ball example created in Exercise 3.2.1? Assume that every time the ball bounces it loses a bit of its kinetic energy.
For each attractor obtained in Exercise
Another thing you can learn from phase space visualizations is the stability of the system’s states. If you see that trajectories are converging to a certain point or area in the phase space, that means the system’s state is stable in that area. But if you see trajectories are diverging from a certain point or area, that means the system’s state is unstable in that area. Knowing system stability is often extremely important to understand, design, and/or control systems in real-world applications. The following chapters will put a particular emphasis on this stability issue.
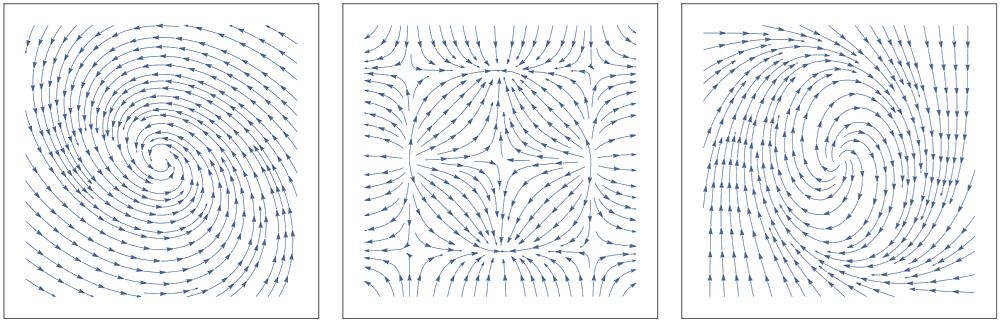
For each of the phase spaces shown below, identify the following:
- attractor(s)
- basin of attraction for each attractor
- stability of the system’s state at several locations in the phase space
Consider a market where two equally good products, A and B, are competing with each other for market share. There is a customer review website where users of each product submit their ratings. Since there is no actual difference in the product quality, the average rating scores are about the same between the two products, but the customers can also see the total number of submitted ratings for each product, which shows how popular the product is in the market. Customers tend to adopt a more popular choice. Answer the following questions:
- What would the phase space of this system look like?
- Are there any attractors? Are there any basins of attraction?
- How does the system’s fate depend on its initial state?
- If you were in charge of marketing product A, what would you do?