
7.6: The Cross Product
- Page ID
- 34954
Learning Objectives
- Calculate the cross product of two given vectors.
- Use determinants to calculate a cross product.
- Find a vector orthogonal to two given vectors.
- Determine areas by using the cross product.
Imagine a mechanic turning a wrench to tighten a bolt. The mechanic applies a force at the end of the wrench. This creates rotation, or torque, which tightens the bolt. We can use vectors to represent the force applied by the mechanic, and the distance (radius) from the bolt to the end of the wrench. Then, we can represent torque by a vector oriented along the axis of rotation. Note that the torque vector is orthogonal to both the force vector and the radius vector.
In this section, we develop an operation called the cross product, which allows us to find a vector orthogonal to two given vectors. Calculating torque is an important application of cross products, and we examine torque in more detail later in the section.
The Cross Product and Its Properties
The dot product is a multiplication of two vectors that results in a scalar. In this section, we introduce a product of two vectors that generates a third vector orthogonal to the first two. Consider how we might find such a vector. Let \(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩\) be nonzero vectors. We want to find a vector \(\vecs w=⟨w_1,w_2,w_3⟩\) orthogonal to both \(\vecs u\) and \(\vecs v\)—that is, we want to find \(\vecs w\) such that \(\vecs u ⋅ \vecs w=0\) and \( \vecs v⋅ \vecs w=0\). Therefore, \(w_1\), \(w_2,\) and \(w_3\) must satisfy
\[u_1w_1+u_2w_2+u_3w_3=0 \label{eq1}\]
\[v_1w_1+v_2w_2+v_3w_3=0. \label{eq2} \]
If we multiply the top equation by \(v_3\) and the bottom equation by \(u_3\) and subtract, we can eliminate the variable \(w_3\), which gives
\[(u_1v_3−v_1u_3)w_1+(u_2v_3−v_2u_3)w_2=0. \nonumber\]
If we select
\[\begin{align*} w_1 &=u_2v_3−u_3v_2 \\[4pt] w_2 &=−(u_1v_3−u_3v_1), \end{align*}\]
we get a possible solution vector. Substituting these values back into the original equations (Equations \ref{eq1} and \ref{eq2}) gives
\[w_3=u_1v_2−u_2v_1. \nonumber\]
That is, vector
\[\vecs w=⟨u_2v_3−u_3v_2,−(u_1v_3−u_3v_1),u_1v_2−u_2v_1⟩ \label{crossSum}\]
is orthogonal to both \(\vecs u\) and \(\vecs v\). Unfortunately, this formula is complicated and difficult to remember, so determinant notation can be used to simplify the process.
Determinants and the Cross Product
Using the formula in Equation \ref{crossSum} to find the cross product is difficult to remember. Fortunately, we have an alternative. We can calculate the cross product of two vectors using determinant notation. Using determinants to evaluate a cross product is easier because there is fundamentally just a simple pattern to remember, rather than a complicated formula.
A \(2×2\) determinant is defined by
\[\begin{vmatrix} { \color{red}{a_1}} & b_1\\ a_2 & { \color{Red}{b_2}}\end{vmatrix} = { \color{Red}{a_1b_2}} −b_1a_2.\]
For example,
\[\begin{vmatrix} { \color{red}{3}} & −2\\ 5 & { \color{red}{1}}\end{vmatrix} = { \color{red}{3(1)}}−5(−2)=3+10=13.\]
A \(3×3\) determinant is defined in terms of \(2×2\) determinants as follows:
\[\begin{vmatrix}
a_1 & a_2 & a_3 \\
b_1 & b_2 & b_3\\
c_1 & c_2 & c_3
\end{vmatrix}
=a_1\begin{vmatrix}{\color{Red}{b_2}} & b_3\\ c_2 & {\color{Red}{c_3}} \end{vmatrix}
−a_2\begin{vmatrix}{ \color{Red}{b_1}} & b_3\\ c_1 & {\color{Red}{c_3}} \end{vmatrix}
+a_3\begin{vmatrix}{ \color{Red}{b_1}} & b_2\\ c_1 & {\color{Red}{c_2}}\end{vmatrix}.
\label{expandEqn}\]
Equation \ref{expandEqn} is referred to as the expansion of the determinant along the first row. Notice that the multipliers of each of the \(2×2\) determinants on the right side of this expression are the entries in the first row of the \(3×3\) determinant. Furthermore, each of the \(2×2\) determinants contains the entries from the \(3×3\) determinant that would remain if you crossed out the row and column containing the multiplier.
| \( \begin{array} { l l} \begin{vmatrix} { \color{Cerulean}{a_1}} & {\color{red}{✗}} & {\color{red}{✗}}\\{\color{red}{✗}} & b_2 & b_3\\{\color{red}{✗}} & c_2 & c_3\end{vmatrix} &={ \color{Cerulean}{a_1}}\begin{vmatrix}{ \color{Red}{b_2}} & b_3\\c_2 & { \color{Red}{c_3}}\end{vmatrix}\\ &={ \color{Cerulean}{a_1}}({ \color{Red}{b_2c_3}}−c_2b_3 ) \end{array} \) |
\( \begin{array} { l l} \begin{vmatrix}{\color{red}{✗}} & { \color{Cerulean}{a_2}} & {\color{red}{✗}}\\b_1 & {\color{red}{✗}} & b_3\\c_1 & {\color{red}{✗}} & c_3\end{vmatrix} &={\color{red}{−}}{ \color{Cerulean}{a_2}}\begin{vmatrix}{ \color{Red}{b_1}} & b_3\\c_1 & { \color{Red}{c_3}}\end{vmatrix}\\ &={\color{red}{−}}{ \color{Cerulean}{a_2}}({\color{Red}{b_1c_3}}−c_1b_3 ) \end{array} \) |
\( \begin{array} { l l} \begin{vmatrix} {\color{red}{✗}} & {\color{red}{✗}} & { \color{Cerulean}{a_3}}\\b_1 & b_2 & {\color{red}{✗}}\\c_1 & c_2 & {\color{red}{✗}}\end{vmatrix} &={ \color{Cerulean}{a_3}}\begin{vmatrix}{ \color{Red}{b_1}} & b_2\\c_1 & { \color{Red}{c_2}}\end{vmatrix}\\ &={ \color{Cerulean}{a_3}}({ \color{Red}{b_1c_2}}−c_1b_2 ) \end{array} \) |
Thus, for the first term on the right, \(\color{Cerulean}{a_1}\) is the multiplier, and the \(2×2\) determinant contains the entries that remain if you cross out the first row and first column of the \(3×3\) determinant. Similarly, for the second term, the multiplier is \(a_2\), and the \(2×2\) determinant contains the entries that remain if you cross out the first row and second column of the \(3×3\) determinant. Notice, however, that the coefficient of the second term is negative. The third term can be calculated in similar fashion.
Observe that the expansion of each \(2×2\) determinant corresponds to the components listed in Equation \ref{crossSum} when \(\vecs u=⟨b_1,b_2,b_3⟩\) and \(\vecs v=⟨c_1,c_2,c_3⟩\) . If the entries along the first row of the determinant are made the standard unit vectors \(\hat{\mathbf i} \), \(\hat{\mathbf j} \), and \(\hat{\mathbf k} \), we can obtain the determinant definition of the cross product.
Definition: Cross Product
The cross product \(\vecs u×\vecs v\) is a vector that is perpendicular to two given vectors.
Given vectors \(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩,\) the cross product is vector is defined by the formula
\[\begin{align} \vecs u×\vecs v &= (u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1) \mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k} \nonumber \\[4pt] &=⟨u_2v_3−u_3v_2,−(u_1v_3−u_3v_1),u_1v_2−u_2v_1⟩. \label{cross}\end{align}\]
The cross product is more easily calculated using determinant notation:
\[
\begin{vmatrix} \hat{\mathbf i} & \hat{\mathbf j} & \hat{\mathbf k} \\u_1 & u_2 & u_3\\v_1 & v_2 & v_3\end{vmatrix}
=\hat{\mathbf i}\begin{vmatrix}{ \color{Red}{u_2}} & u_3\\v_2 & { \color{Red}{v_3}}\end{vmatrix}
−\hat{\mathbf j}\begin{vmatrix}{ \color{Red}{u_1}} & u_3\\v_1 & { \color{Red}{v_3}}\end{vmatrix}
+\hat{\mathbf k}\begin{vmatrix}{ \color{Red}{u_1}} & u_2\\v_1 & { \color{Red}{v_4}}\end{vmatrix}.
\label{crossDetDef}\]
The next few examples provide practice evaluating determinants in general.
Example \(\PageIndex{1}\): Using Expansion Along the First Row to Compute a \(3×3\) Determinant
Evaluate the determinant \(\begin{vmatrix}2 & 5 &−1\\−1 & 1 & 3\\−2 & 3 & 4\end{vmatrix}\).
Solution
We have
\[\begin{align*} \begin{vmatrix}2 & 5 & −1\\−1 & 1 & 3\\−2 & 3 & 4\end{vmatrix} &=2\begin{vmatrix}1 & 3\\3 & 4\end{vmatrix}−5\begin{vmatrix}−1 & 3\\−2 & 4\end{vmatrix}−1\begin{vmatrix}−1 & 1\\−2 & 3\end{vmatrix} \\[4pt]
&=2(4−9)−5(−4+6)−1(−3+2) \\[4pt]
&= 2(−5)−5(2)−1(−1)=−10−10+1 \\[4pt]
&=−19 \end{align*}\]
![]() Try It \(\PageIndex{1}\)
Try It \(\PageIndex{1}\)
Evaluate the determinant \(\begin{vmatrix}1 & −2 & −1\\3 & 2 & −3\\1 & 5 & 4\end{vmatrix}\).
- Hint
-
Expand along the first row. Don’t forget the second term is negative!
- Answer
-
40
Cross Product Evaluation
Technically, determinants are defined only in terms of arrays of real numbers. However, the determinant notation provides a useful mnemonic device for the cross product formula. Now for some practice calculating cross products.
Example \(\PageIndex{2}\): Using Determinant Notation to find \(\vecs p×\vecs q\)
Let \(\vecs p=⟨−1,2,5⟩\) and \(\vecs q=⟨4,0,−3⟩\). Find \(\vecs p×\vecs q\).
Solution
We set up our determinant by putting the standard unit vectors across the first row, the components of \(\vecs u\) in the second row, and the components of \(\vecs v\) in the third row. Then, we have
\[\begin{align*} \vecs p×\vecs q &=\begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\−1 & 2 & 5\\4 & 0 & −3\end{vmatrix}=\begin{vmatrix}2 & 5\\0 & −3\end{vmatrix}\mathbf{\hat i}−\begin{vmatrix}−1 & 5\\4 & −3\end{vmatrix}\mathbf{\hat j}+\begin{vmatrix}−1 & 2\\4 & 0\end{vmatrix}\mathbf{\hat k} \\[4pt]
&= (−6−0)\mathbf{\hat i}−(3−20)\mathbf{\hat j}+(0−8)\mathbf{\hat k} \\[4pt]
&=−6\mathbf{\hat i}+17\mathbf{\hat j}−8\mathbf{\hat k}.\end{align*}\]
Notice that this answer confirms the calculation of the cross product in Example \(\PageIndex{1}\).
![]() Try It \(\PageIndex{2}\)
Try It \(\PageIndex{2}\)
Use determinant notation to find \(\vecs a×\vecs b\), where \(\vecs a=⟨8,2,3⟩\) and \(\vecs b=⟨−1,0,4⟩.\)
- Hint
-
Calculate the determinant \(\begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\8 & 2 & 3\\−1 & 0 & 4\end{vmatrix}\).
- Answer
-
\(\vecs a×\vecs b = 8\mathbf{\hat i}−35\mathbf{\hat j}+2\mathbf{\hat k}\)
Properties of the Cross Product
The Cross Product is a vector orthogonal to two other vectors
From the way we have developed \(\vecs u×\vecs v\), it should be clear that the cross product is orthogonal to both \(\vecs u\) and \(\vecs v\). However, it never hurts to check. To show that \(\vecs u×\vecs v\) is orthogonal to \(\vecs u\), we calculate the dot product of \(\vecs u\) and \(\vecs u×\vecs v\).
\[\begin{align*} \vecs u⋅(\vecs u×\vecs v) &=⟨u_1,u_2,u_3⟩⋅⟨u_2v_3−u_3v_2,−u_1v_3+u_3v_1,u_1v_2−u_2v_1⟩ \\[4pt] &=u_1(u_2v_3−u_3v_2)+u_2(−u_1v_3+u_3v_1)+u_3(u_1v_2−u_2v_1) \\[4pt]
&=u_1u_2v_3−u_1u_3v_2−u_1u_2v_3+u_2u_3v_1+u_1u_3v_2−u_2u_3v_1\\[4pt]
&=(u_1u_2v_3−u_1u_2v_3)+(−u_1u_3v_2+u_1u_3v_2)+(u_2u_3v_1−u_2u_3v_1) \\[4pt]
&= 0 \end{align*}\]
In a similar manner, we can show that the cross product is also orthogonal to \(\vecs v\).
Although it may not be obvious from Equation \ref{cross}, the direction of \(\vecs u×\vecs v\) is given by the right-hand rule. If we hold the right hand out with the fingers pointing in the direction of \(\vecs u\), then curl the fingers toward vector \(\vecs v\), the thumb points in the direction of the cross product, as shown in Figure \(\PageIndex{2}\).
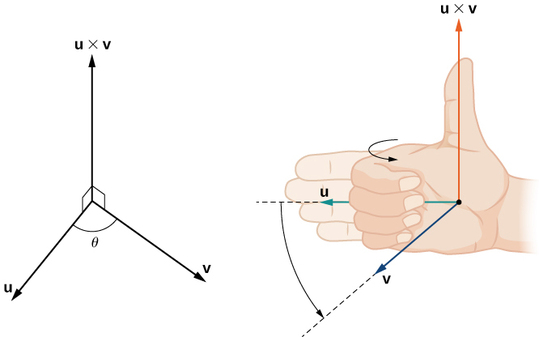
Notice what this means for the direction of \(\vecs v×\vecs u\). If we apply the right-hand rule to \(\vecs v×\vecs u\), we start with our fingers pointed in the direction of \(\vecs v\), then curl our fingers toward the vector \(\vecs u\). In this case, the thumb points in the opposite direction of \(\vecs u×\vecs v\). (Try it!)
Example \(\PageIndex{3}\): Anticommutativity of the Cross Product
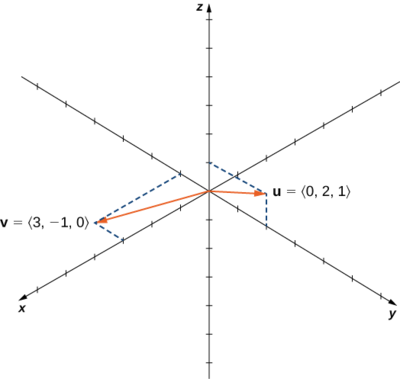
Let \(\vecs u=⟨0,2,1⟩\) and \(\vecs v=⟨3,−1,0⟩\). Calculate \(\vecs u×\vecs v\) and \(\vecs v×\vecs u\) and graph them.
Solution
We have
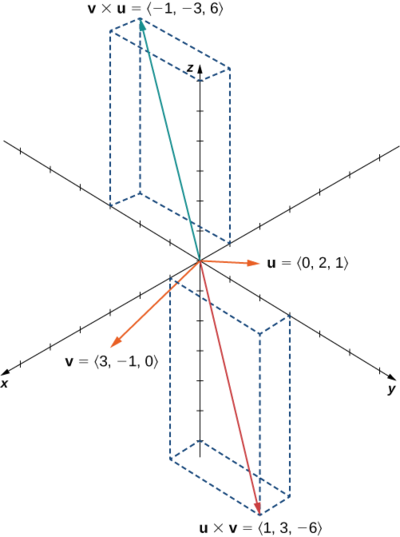
\(\vecs u×\vecs v=⟨(0+1),−(0−3),(0−6)⟩=⟨1,3,−6⟩\)
\(\vecs v×\vecs u=⟨(−1−0),−(3−0),(6−0)⟩=⟨−1,−3,6⟩.\)
We see that, in this case, \(\vecs u×\vecs v=−(\vecs v×\vecs u)\) (Figure \(\PageIndex{4}\)). We prove this in general later in this section.
![]() Try It \(\PageIndex{3}\)
Try It \(\PageIndex{3}\)
Suppose vectors \(\vecs u\) and \(\vecs v\) lie in the \(xy\)-plane (the \(z\)-component of each vector is zero). Now suppose the \(x\)- and \(y\)-components of \(\vecs u\) and the \(y\)-component of \(\vecs v\) are all positive, whereas the \(x\)-component of \(\vecs v\) is negative. Assuming the coordinate axes are oriented in the usual positions, in which direction does \(\vecs u×\vecs v\) point?
- Hint
-
Remember the right-hand rule (Figure \(\PageIndex{2}\)).
- Answer
-
Up (the positive \(z\)-direction)
Magnitude of the Cross Product
So far in this section, we have been concerned with the direction of the vector \(\vecs u×\vecs v\), but we have not discussed its magnitude. It turns out there is a simple expression for the magnitude of \(\vecs u×\vecs v\) involving the magnitudes of \(\vecs u\) and \(\vecs v\), and the sine of the angle between them.
Magnitude of the Cross Product
Let \(\vecs u\) and \(\vecs v\) be vectors, and let \(θ\) be the angle between them. Then,
\(‖\vecs u×\vecs v‖=‖\vecs u‖⋅‖\vecs v‖⋅\sin θ.\)
Proof
Let \(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩\) be vectors, and let \(θ\) denote the angle between them. Then
\[ \begin{align*} ‖\vecs u×\vecs v‖^2 &=(u_2v_3−u_3v_2)^2+(u_3v_1−u_1v_3)^2+(u_1v_2−u_2v_1)^2 \\[4pt]
&=u^2_2v^2_3−2u_2u_3v_2v_3+u^2_3v^2_2+u^2_3v^2_1−2u_1u_3v_1v_3+u^2_1v^2_3+u^2_1v^2_2−2u_1u_2v_1v_2+u^2_2v^2_1 \\[4pt]
&=u^2_1v^2_1+u^2_1v^2_2+u^2_1v^2_3+u^2_2v^2_1+u^2_2v^2_2+u^2_2v^2_3+u^2_3v^2_1+u^2_3v^2_2+u^2_3v^2_3−(u^2_1v^2_1+u^2_2v^2_2+u^2_3v^2_3+2u_1u_2v_1v_2+2u_1u_3v_1v_3+2u_2u_3v_2v_3) \\[4pt]
&=(u^2_1+u^2_2+u^2_3)(v^2_1+v^2_2+v^2_3)−(u_1v_1+u_2v_2+u_3v_3)^2 \\[4pt]
&=‖\vecs u‖^2‖\vecs v‖^2−(\vecs u⋅\vecs v)^2 \\[4pt]
&=‖\vecs u‖^2‖\vecs v‖^2−‖\vecs u‖^2‖\vecs v‖^2 \cos^2θ \\[4pt]
&=‖\vecs u‖^2‖\vecs v‖^2(1−\cos^2θ) \\[4pt]
&=‖\vecs u‖^2‖\vecs v‖^2(\sin^2θ). \end{align*} \]
Taking square roots and noting that \(\sqrt{\sin^2θ}=\sinθ\) for \(0≤θ≤180°,\) we have the desired result:
\[‖\vecs u×\vecs v‖=‖\vecs u‖‖\vecs v‖ \sin θ.\]
This definition of the cross product allows us to visualize or interpret the product geometrically. It is clear, for example, that the cross product is defined only for vectors in three dimensions, not for vectors in two dimensions. In two dimensions, it is impossible to generate a vector simultaneously orthogonal to two nonparallel vectors.
Example \(\PageIndex{4}\): Calculating the Cross Product
Find the magnitude of the cross product of \(\vecs u=⟨0,4,0⟩\) and \(\vecs v=⟨0,0,−3⟩\).
Solution
We have
\[\begin{align*} ‖\vecs u×\vecs v‖ &= ‖\vecs u‖⋅‖\vecs v‖⋅\sinθ \\[4pt]
&=\sqrt{0^2+4^2+0^2}⋅\sqrt{0^2+0^2+(−3)^2}⋅\sin{\dfrac{π}{2}} \\[4pt]
&=4(3)(1)=12 \end{align*}\]
![]() Try It \(\PageIndex{4}\)
Try It \(\PageIndex{4}\)
Find the magnitude of \(\vecs u×\vecs v\), where \(\vecs u=⟨−8,0,0⟩\) and \(\vecs v=⟨0,2,0⟩\).
- Hint
-
Vectors \(\vecs u\) and \(\vecs v\) are orthogonal.
- Answer
-
16
The Unit Vector Orthogonal to Two Other Vectors
The cross product is very useful for several types of calculations, including finding a vector orthogonal to two given vectors, computing areas of triangles and parallelograms, and even determining the volume of the three-dimensional geometric shape made of parallelograms known as a parallelepiped. The following examples illustrate these calculations.
Example \(\PageIndex{5}\): Finding a Unit Vector Orthogonal to Two Given Vectors
Let \(\vecs a=⟨5,2,−1⟩\) and \(\vecs b=⟨0,−1,4⟩\). Find a unit vector orthogonal to both \(\vecs a\) and \(\vecs b\).
Solution
The cross product \(\vecs a×\vecs b\) is orthogonal to both vectors \(\vecs a\) and \(\vecs b\). We can calculate it with a determinant:
\[\begin{align*} \vecs a×\vecs b &=\begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\5 & 2 & −1\\0 & −1 & 4\end{vmatrix}=\begin{vmatrix}2 & −1\\−1 & 4\end{vmatrix}\mathbf{\hat i}−\begin{vmatrix}5 & −1\\0 & 4\end{vmatrix}\mathbf{\hat j}+\begin{vmatrix}5 & 2\\0 & −1\end{vmatrix}\mathbf{\hat k} \\[4pt]
&=(8−1)\mathbf{\hat i}−(20−0)\mathbf{\hat j}+(−5−0)\mathbf{\hat k} \\[4pt]
&=7\mathbf{\hat i}−20\mathbf{\hat j}−5\mathbf{\hat k}.\end{align*} \]
Normalize this vector to find a unit vector in the same direction:
\(\|\vecs a×\vecs b\|=\sqrt{(7)^2+(−20)^2+(−5)^2}=\sqrt{474}\).
Thus, \(\left\langle\dfrac{7}{\sqrt{474}},\dfrac{−20}{\sqrt{474}},\dfrac{−5}{\sqrt{474}}\right\rangle\) is a unit vector orthogonal to \(\vecs a\) and \(\vecs b\).
Simplified, this vector becomes \(\left\langle\dfrac{7\sqrt{474}}{474},\dfrac{−10\sqrt{474}}{237},\dfrac{−5\sqrt{474}}{474}\right\rangle\).
![]() Try It \(\PageIndex{5}\)
Try It \(\PageIndex{5}\)
Find a unit vector orthogonal to both \(\vecs a\) and \(\vecs b\), where \(\vecs a=⟨4,0,3⟩\) and \(\vecs b=⟨1,1,4⟩.\)
- Hint
-
Normalize the cross product.
- Answer
-
\(\left\langle\dfrac{−3}{\sqrt{194}},\dfrac{−13}{\sqrt{194}},\dfrac{4}{\sqrt{194}}\right\rangle\) or, simplified as \(\left\langle\dfrac{−3\sqrt{194}}{194},\dfrac{−13\sqrt{194}}{194},\dfrac{2\sqrt{194}}{97}\right\rangle\)
Area of a Parallelogram
To use the cross product for calculating areas, we state and prove the following theorem.
Area of a Parallelogram
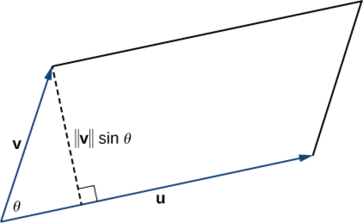
If we locate vectors \(\vecs u\) and \(\vecs v\) such that they form adjacent sides of a parallelogram, then the area of the parallelogram is given by \(‖\vecs u×\vecs v‖\) (Figure \(\PageIndex{5}\)).
Proof
We show that the magnitude of the cross product is equal to the base times height of the parallelogram.
\[\begin{align*} \text{Area of a parallelogram} &= \text{base} × \text{height} \\[4pt] &=‖\vecs u‖(‖\vecs v‖\sin θ) \\[4pt] &=‖\vecs u×\vecs v‖ \end{align*}\]
Example \(\PageIndex{6}\): Finding the Area of a Triangle
Let \(P=(1,0,0),Q=(0,1,0),\) and \(R=(0,0,1)\) be the vertices of a triangle (Figure \(\PageIndex{6a}\)). Find its area.
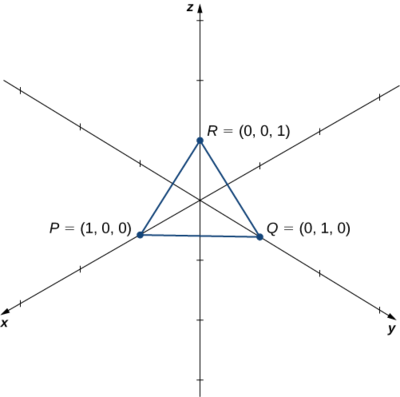
Solution
We have \(\vecd{PQ}=⟨0−1,1−0,0−0⟩=⟨−1,1,0⟩\) and \(\vecd{PR}=⟨0−1,0−0,1−0⟩=⟨−1,0,1⟩\). The area of the parallelogram with adjacent sides \(\vecd{PQ}\) and \(\vecd{PR}\) is given by \(∥\vecd{PQ}×\vecd{PR}∥\):
\[ \begin{align*} \vecd{PQ} \times \vecd{PR} &= \begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\−1 & 1 & 0\\−1 & 0 & 1\end{vmatrix} \\[4pt]
&=(1−0)\mathbf{\hat i}−(−1−0)\mathbf{\hat j}+(0−(−1))\mathbf{\hat k} \\[4pt]
&=\mathbf{\hat i}+\mathbf{\hat j}+\mathbf{\hat k} \\[10pt]
∥\vecd{PQ}×\vecd{PR}∥ &=∥⟨1,1,1⟩∥ \\[4pt]
&=\sqrt{1^2+1^2+1^2} \\[4pt]
&=\sqrt{3}. \end{align*} \]
The area of \(ΔPQR\) is half the area of the parallelogram or \(\sqrt{3}/2 \, \text{units}^2\).
![]() Try It \(\PageIndex{6}\)
Try It \(\PageIndex{6}\)
Find the area of the parallelogram \( PQRS\) with vertices \( P(1,1,0)\), \(Q(7,1,0)\), \(R(9,4,2)\), and \( S(3,4,2)\).
- Hint
-
Sketch the parallelogram and identify two vectors that form adjacent sides of the parallelogram.
- Answer
-
\(6\sqrt{13}\, \text{units}^2\)
Key Concepts
- The cross product \(\vecs u×\vecs v\) of two vectors \(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩\) is a vector orthogonal to both \(\vecs u\) and \(\vecs v\). Its length is given by \(‖\vecs u×\vecs v‖=‖\vecs u‖⋅‖\vecs v‖⋅\sin θ,\) where \(θ\) is the angle between \(\vecs u\) and \(\vecs v\). Its direction is given by the right-hand rule.
- The algebraic formula for calculating the cross product of two vectors,
\(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩\), is
\(\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k}.\)
- The cross product of vectors \(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩\) is the determinant \(\begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\u_1 & u_2 & u_3\\v_1 & v_2 & v_3\end{vmatrix}\)
- If vectors \(\vecs u\) and \(\vecs v\) form adjacent sides of a parallelogram, then the area of the parallelogram is given by \(\|\vecs u×\vecs v\|.\)
- The cross product can be used to identify a vector orthogonal to two given vectors or to a plane.
Key Equations
- The cross product of two vectors in terms of the unit vectors
\[\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k}\]
Glossary
cross product
\(\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k},\) where \(\vecs u=⟨u_1,u_2,u_3⟩\) and \(\vecs v=⟨v_1,v_2,v_3⟩\)
determinant
a real number associated with a square matrix
vector product
the cross product of two vectors
Contributors and Attributions
Gilbert Strang (MIT) and Edwin “Jed” Herman (Harvey Mudd) with many contributing authors. This content by OpenStax is licensed with a CC-BY-SA-NC 4.0 license. Download for free at http://cnx.org.