
2.8: Limits and continuity of Inverse Trigonometric functions




- Last updated
- Dec 21, 2020
- Save as PDF
This page is a draft and is under active development.
( \newcommand{\kernel}{\mathrm{null}\,}\)
Inverse functions
Recall that a function f is one-to-one (often written as 1-1) if it assigns distinct values of y to distinct values of x . In other words, if x_1 \ne x_2 then f(x_1 ) \ne f(x_2 ) . Equivalently, f is one-to-one if f(x_1 ) = f(x_2 ) implies x_1 = x_2 . There is a simple horizontal rule for determining whether a function y=f(x) is one-to-one: f is one-to-one if and only if every horizontal line intersects the graph of y=f(x) in the xy-coordinate plane at most once (see Figure 5.3.3).
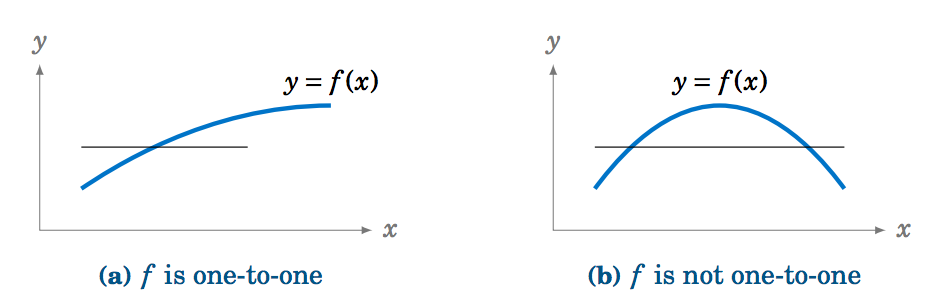
Figure 5.3.3 Horizontal rule for one-to-one functions
If a function f is one-to-one on its domain, then f has an inverse function, denoted by f^{-1} , such that y=f(x) if and only if f^{-1}(y) = x . The domain of f^{-1} is the range of f .
The basic idea is that f^{-1} "undoes'' what f does, and vice versa. In other words,
\nonumber \begin{alignat*}{3}
f^{-1}(f(x)) ~&=~ x \quad&&\text{for all \(x \) in the domain of \(f \), and}\\ \nonumber
f(f^{-1}(y)) ~&=~ y \quad&&\text{for all \(y \) in the range of \(f \).}
\end{alignat*}
Theorem \PageIndex{1}
If f is continuous and one to one, then \(f^{-1}\ is continuous on its domain.
Inverse Trigonometric functions
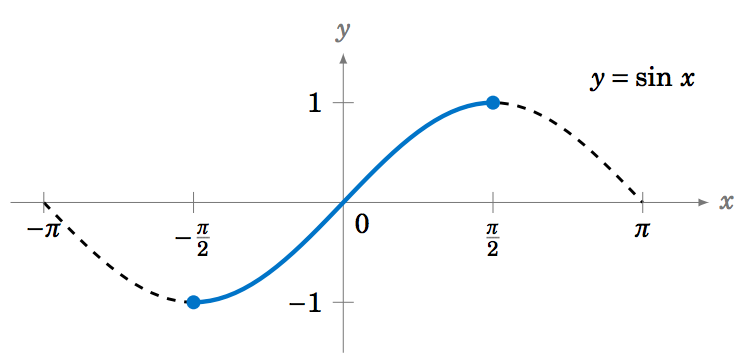
We know from their graphs that none of the trigonometric functions are one-to-one over their entire domains. However, we can restrict those functions to subsets of their domains where they are one-to-one. For example, y=\sin\;x is one-to-one over the interval \left[ -\frac{\pi}{2},\frac{\pi}{2} \right] , as we see in the graph below:
For -\frac{\pi}{2} \le x \le \frac{\pi}{2} we have -1 \le \sin\;x \le 1 , so we can define the inverse sine function y=\sin^{-1} x (sometimes called the arc sine and denoted by y=\arcsin\;(x) whose domain is the interval [-1,1] and whose range is the interval \left[ -\frac{\pi}{2},\frac{\pi}{2} \right] . In other words:
\begin{alignat}{3} \sin^{-1} (\sin\;y) ~&=~ y \quad&&\text{for \(-\tfrac{\pi}{2} \le y \le \tfrac{\pi}{2}\)}\label{eqn:arcsin1}\\ \sin\;(\sin^{-1} x) ~&=~ x \quad&&\text{for \(-1 \le x \le 1\)}\label{eqn:arcsin2} \end{alignat}
Summary of Inverse Trigonometric functions
Lets illustrate the summary of Trigonometric functions and Inverse Trigonometric functions in following table:
| Trigonometric function | graph of the Trigonometric function |
Restricted domain and the range |
Inverse Trigonometric function |
graph of the Inverse Trigonometric function |
Properties |
| f(x)=\sin(x) | 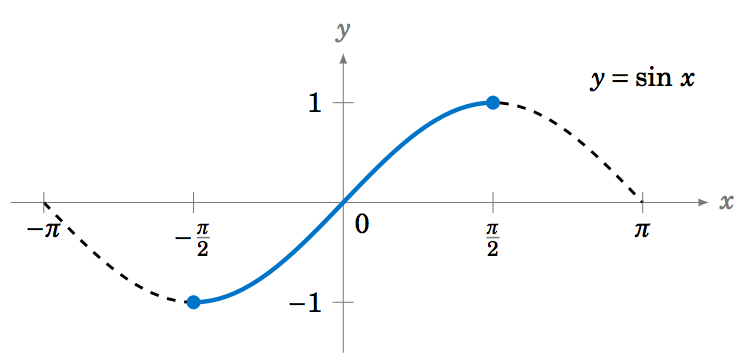 |
\left[ -\frac{\pi}{2},\frac{\pi}{2} \right] and [-1,1] |
f^{-1}(x)=\sin^{-1} x | 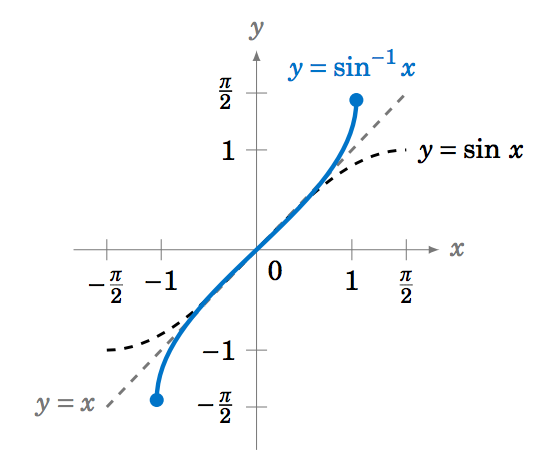 |
|
| f(x)=\cos(x) | 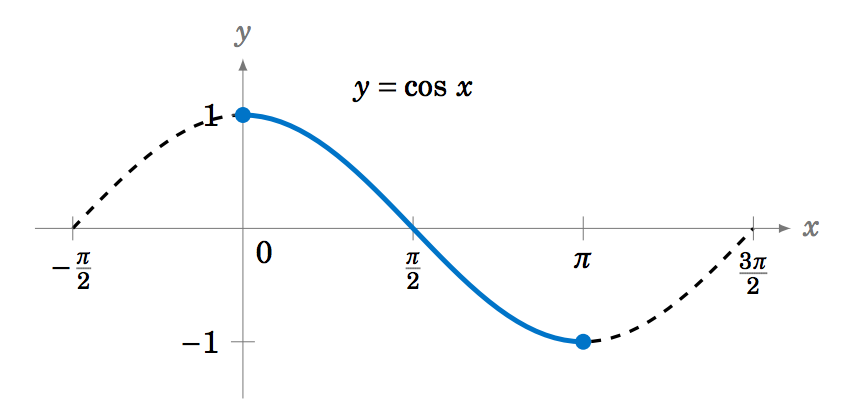 |
[0,\pi] and [-1,1] |
f^{-1}(x)=\cos^{-1} x | 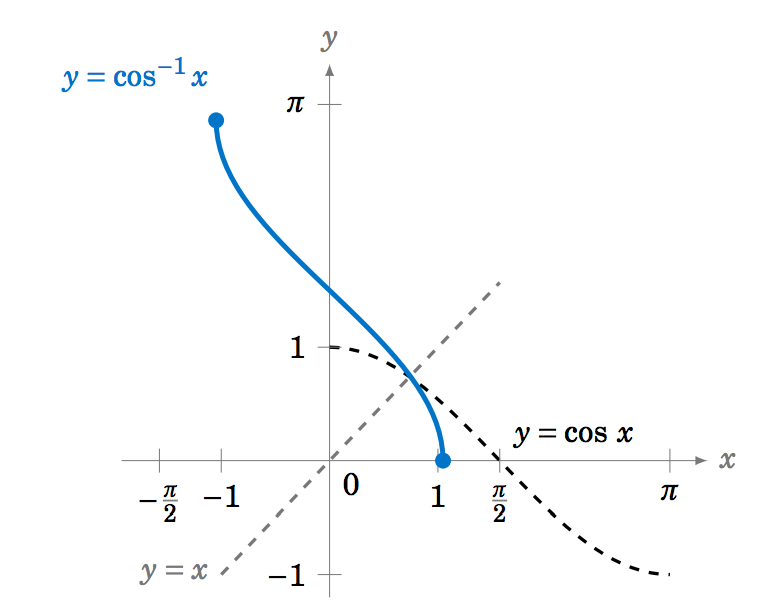 |
\begin{alignat}{3} \cos^{-1} (\cos\;y) ~&=~ y \quad&&\text{for \(0 \le y \le \pi\)}\label{eqn:arccos1}\\ \cos\;(\cos^{-1} x) ~&=~ x \quad&&\text{for \(-1 \le x \le 1\)}\label{eqn:arccos2} \end{alignat} |
|
f(x)=\tan(x) |
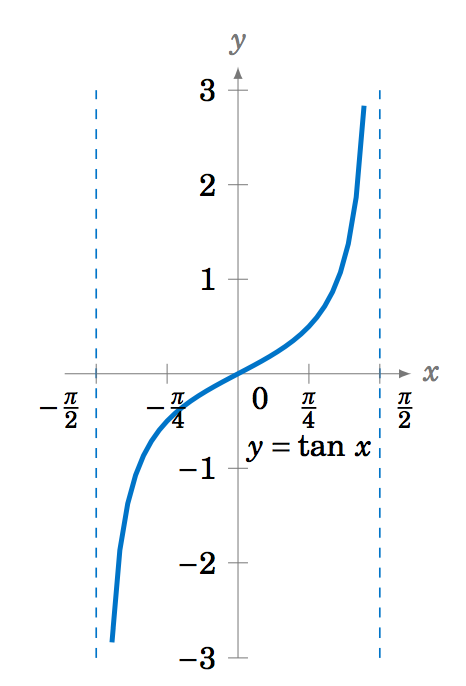 |
\left( -\frac{\pi}{2},\frac{\pi}{2} \right) and \mathbb{R} |
f^{-1}(x)=\tan^{-1} x |
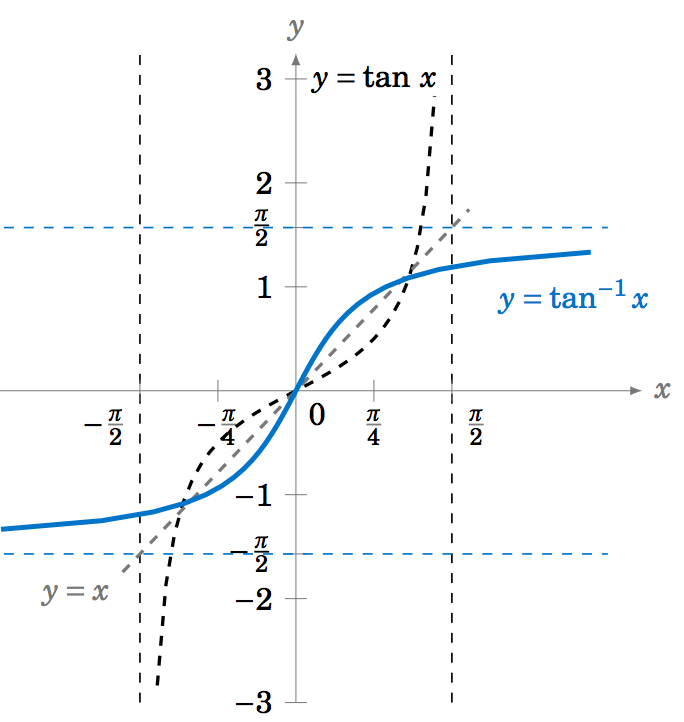 |
\begin{alignat}{3} \tan^{-1} (\tan\;y) ~&=~ y \quad&&\text{for \(-\tfrac{\pi}{2} < y < \tfrac{\pi}{2}\)}\label{eqn:arctan1}\\ \tan\;(\tan^{-1} x) ~&=~ x \quad&&\text{for all real \(x\)}\label{eqn:arctan2} \end{alignat} |
|
f(x)=\cot(x) |
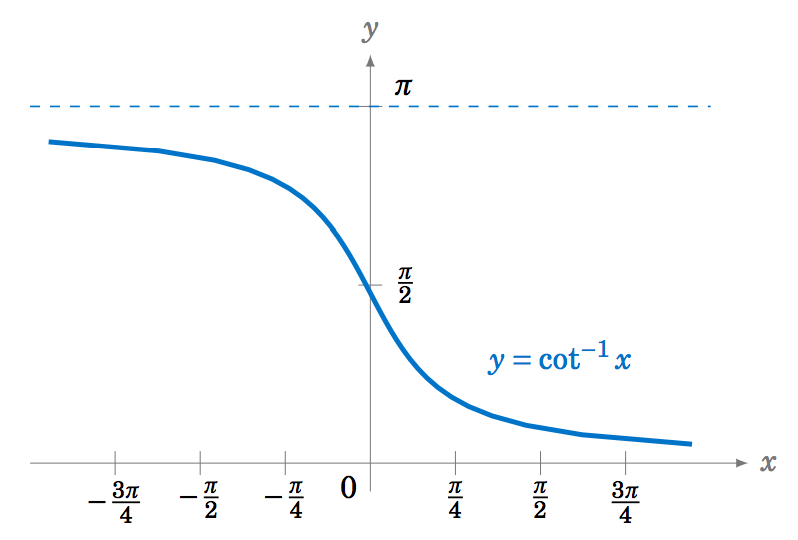 |
\begin{alignat}{3} \cot^{-1} (\cot\;y) ~&=~ y \quad&&\text{for \(0 < y < \pi\)}\label{eqn:arccot1}\\ \cot\;(\cot^{-1} x) ~&=~ x \quad&&\text{for all real \(x\)}\label{eqn:arccot2} \end{alignat} | |||
| f(x)=\sec(x) |
[0,\pi], with x\ne \frac{\pi}{2} and \mathbb{R} |
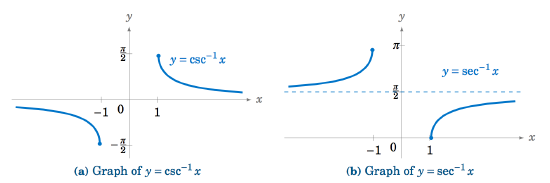 |
\begin{alignat}{3} \csc^{-1} (\csc\;y) ~&=~ y \quad&&\text{for \(-\frac{\pi}{2} \le y \le \frac{\pi}{2} \), \(y \ne 0\)}\label{eqn:arccsc1}\\ \csc\;(\csc^{-1} x) ~&=~ x \quad&&\text{for \(|x| \ge 1\)}\label{eqn:arccsc2} \end{alignat} \begin{alignat}{3} \sec^{-1} (\sec\;y) ~&=~ y \quad&&\text{for \(0 \le y \le \pi \), \(y \ne \frac{\pi}{2}\)}\label{eqn:arcsec1}\\ \sec\;(\sec^{-1} x) ~&=~ x \quad&&\text{for \(|x| \ge 1\)}\label{eqn:arcsec2} \end{alignat} |
Below are examples:
Example \PageIndex{1}:
Find \sin^{-1} \left(\sin\;\frac{\pi}{4}\right) .
Solution
Since -\frac{\pi}{2} \le \frac{\pi}{4} \le \frac{\pi}{2} , we know that \sin^{-1} \left(\sin\;\frac{\pi}{4}\right) = \boxed{\frac{\pi}{4}}\; , by Equation \ref{eqn:arcsin1}.
Example \PageIndex{2}:
Find \sin^{-1} \left(\sin\;\frac{5\pi}{4}\right) .
Solution
Since \frac{5\pi}{4} > \frac{\pi}{2} , we can not use Equation \ref{eqn:arcsin1}. But we know that \sin\;\frac{5\pi}{4} = -\frac{1}{\sqrt{2}} . Thus, \sin^{-1} \left(\sin\;\frac{5\pi}{4}\right) = \sin^{-1} \left( -\frac{1}{\sqrt{2}} \right) is, by definition, the angle y such that -\frac{\pi}{2} \le y \le \frac{\pi}{2} and \sin\;y = -\frac{1}{\sqrt{2}} . That angle is y=-\frac{\pi}{4} , since
\sin\;\left( -\tfrac{\pi}{4} \right) ~=~ -\sin\;\left( \tfrac{\pi}{4} \right) ~=~ -\tfrac{1}{\sqrt{2}} ~. \nonumber
Example \PageIndex{3}:
Find \cos^{-1} \left(\cos\;\frac{\pi}{3}\right) .
Solution
Since 0 \le \frac{\pi}{3} \le \pi , we know that \cos^{-1} \left(\cos\;\frac{\pi}{3}\right) = \boxed{\frac{\pi}{3}}\; , by Equation \ref{eqn:arccos1}.
Example \PageIndex{4}:
Find \cos^{-1} \left(\cos\;\frac{4\pi}{3}\right) .
Solution
Since \frac{4\pi}{3} > \pi , we can not use Equation \ref{eqn:arccos1}. But we know that \cos\;\frac{4\pi}{3} = -\frac{1}{2} . Thus, \cos^{-1} \left(\cos\;\frac{4\pi}{3}\right) = \cos^{-1} \left( -\frac{1}{2} \right) is, by definition, the angle y such that 0 \le y \le \pi and \cos\;y = -\frac{1}{2} . That angle is y=\frac{2\pi}{3} (i.e. 120^\circ). Thus, \cos^{-1} \left(\cos\;\frac{4\pi}{3}\right) = \boxed{\tfrac{2\pi}{3}}\; .
Example \PageIndex{5}:
Find \tan^{-1} \left(\tan\;\frac{\pi}{4}\right) .
Solution
Since -\tfrac{\pi}{2} \le \tfrac{\pi}{4} \le \tfrac{\pi}{2} , we know that \tan^{-1} \left(\tan\;\frac{\pi}{4}\right) = \boxed{\frac{\pi}{4}}\; , by Equation \ref{eqn:arctan1}.
Example \PageIndex{6}:
Find \tan^{-1} \left(\tan\;\pi\right) .
Solution
Since \pi > \tfrac{\pi}{2} , we can not use Equation \ref{eqn:arctan1}. But we know that \tan\;\pi = 0 . Thus, \tan^{-1} \left(\tan\;\pi\right) = \tan^{-1} 0 is, by definition, the angle y such that -\tfrac{\pi}{2} \le y \le \tfrac{\pi}{2} and \tan\;y = 0 . That angle is y=0 . Thus, \tan^{-1} \left(\tan\;\pi \right) = \boxed{0}\; .
Example\PageIndex{7}:
Find the exact value of \cos\;\left(\sin^{-1}\;\left(-\frac{1}{4}\right)\right) .
Solution
Let \theta = \sin^{-1}\;\left(-\frac{1}{4}\right) . We know that -\tfrac{\pi}{2} \le \theta \le \tfrac{\pi}{2} , so since \sin\;\theta = -\frac{1}{4} < 0 , \theta must be in QIV. Hence \cos\;\theta > 0 . Thus,
\cos^2 \;\theta ~=~ 1 ~-~ \sin^2 \;\theta ~=~ 1 ~-~ \left( -\frac{1}{4} \right)^2 ~=~\frac{15}{16} \quad\Rightarrow\quad \cos\;\theta ~=~ \frac{\sqrt{15}}{4} ~. \nonumber
Note that we took the positive square root above since \cos\;\theta > 0 . Thus, \cos\;\left(\sin^{-1}\;\left(-\frac{1}{4}\right)\right) = \boxed{\frac{\sqrt{15}}{4}}\; .
Example \PageIndex{8}:
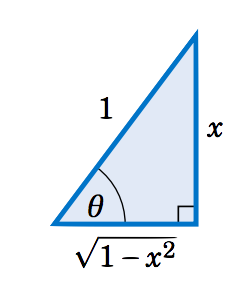
Show that \tan\;(\sin^{-1} x) = \dfrac{x}{\sqrt{1 - x^2}} for -1 < x < 1 .
Solution
When x=0 , the Equation holds trivially, since
\nonumber \tan\;(\sin^{-1} 0) ~=~ \tan\;0 ~=~ 0 ~=~ \dfrac{0}{\sqrt{1 - 0^2}} ~.
Now suppose that 0 < x < 1 . Let \theta = \sin^{-1} x . Then \theta is in QI and \sin\;\theta = x . Draw a right triangle with an angle \theta such that the opposite leg has length x and the hypotenuse has length 1 , as in Figure 5.3.10 (note that this is possible since 0 < x < 1). Then \sin\;\theta = \frac{x}{1} = x . By the Pythagorean Theorem, the adjacent leg has length \sqrt{1 - x^2} . Thus, \tan\;\theta = \frac{x}{\sqrt{1 - x^2}} .
If -1 < x < 0 then \theta = \sin^{-1} x is in QIV. So we can draw the same triangle except that it would be "upside down'' and we would again have \tan\;\theta = \frac{x}{\sqrt{1 - x^2}} , since the tangent and sine have the same sign (negative) in QIV. Thus, \tan\;(\sin^{-1} x) = \dfrac{x}{\sqrt{1 - x^2}} for -1 < x < 1 .
Example \PageIndex{9}:
Prove the identity \tan^{-1} x \;+\; \cot^{-1} x ~=~ \frac{\pi}{2} .
Solution:
Let \theta = \cot^{-1} x . Using relations, we have
\nonumber \tan\;\left( \tfrac{\pi}{2} - \theta \right) ~=~ -\tan\;\left( \theta - \tfrac{\pi}{2} \right) ~=~ \cot\;\theta ~=~ \cot\;(\cot^{-1} x) ~=~ x ~,
by Equation \ref{eqn:arccot2}. So since \tan\;(\tan^{-1} x) = x for all x , this means that \tan\;(\tan^{-1} x) = \tan\;\left( \tfrac{\pi}{2} - \theta \right) . Thus, \tan\;(\tan^{-1} x) = \tan\;\left( \tfrac{\pi}{2} - \cot^{-1} x \right) . Now, we know that 0 < \cot^{-1} x < \pi , so -\tfrac{\pi}{2} < \tfrac{\pi}{2} - \cot^{-1} x < \tfrac{\pi}{2} , i.e. \tfrac{\pi}{2} - \cot^{-1} x is in the restricted subset on which the tangent function is one-to-one. Hence, \tan\;(\tan^{-1} x) = \tan\;\left( \tfrac{\pi}{2} - \cot^{-1} x \right) implies that \tan^{-1} x = \tfrac{\pi}{2} - \cot^{-1} x , which proves the identity.
Continuity of Inverse Trigonometric functions
Example \PageIndex{1}:
Let f(x)= \frac{3 \sec^{-1} (x)}{4-\tan^{-1}( x)}. Find the values(if any) for which f(x) is continuous.
Exercise \PageIndex{1}
Let f(x)= \frac{3 \sec^{-1} (x)}{8+2\tan^{-1}( x)}. Find the values(if any) for which f(x) is continuous.
- Answer
Limit of Inverse Trigonometric functions
Theorem \PageIndex{1}
lim_{x \rightarrow \infty} \tan^{-1}( x) = \frac{\pi}{2} .
lim_{x \rightarrow -\infty} \tan^{-1}( x) = -\frac{\pi}{2} .
lim_{x \rightarrow \infty} \sec^{-1} (x)=\lim _{x \rightarrow \infty} \sec^{-1} (x )= \frac{\pi}{2} .
Example \PageIndex{1}:
Find \lim_{x \rightarrow \infty} sin\left( 2\tan^{-1}( x)\right).
Exercise \PageIndex{1}
Find \lim_{x \rightarrow -\infty} sin\left( 2\tan^{-1}( x)\right).
- Answer
Contributors and Attributions
Michael Corral (Schoolcraft College). The content of this page is distributed under the terms of the GNU Free Documentation License, Version 1.2.
Gilbert Strang (MIT) and Edwin “Jed” Herman (Harvey Mudd) with many contributing authors. This content by OpenStax is licensed with a CC-BY-SA-NC 4.0 license. Download for free at http://cnx.org.
Pamini Thangarajah (Mount Royal University, Calgary, Alberta, Canada)