
4.2: Properties of Line Integrals
- Page ID
- 2236

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)We know from the previous section that for line integrals of real-valued functions (scalar fields), reversing the direction in which the integral is taken along a curve does not change the value of the line integral:
\[\int_C f (x, y)\,ds = \int_{-C} f (x, y)\,ds \label{Eq4.17}\]
For line integrals of vector fields, however, the value does change. To see this, let \(\textbf{f}(x, y) = P(x, y)\textbf{i} +Q(x, y)\textbf{j}\) be a vector field, with \(P\) and \(Q\) continuously differentiable functions. Let \(C\) be a smooth curve parametrized by \(x = x(t), y = y(t), a ≤ t ≤ b\), with position vector \(\textbf{r}(t) = x(t)\textbf{i}+ y(t)\textbf{j}\) (we will usually abbreviate this by saying that \(C : \textbf{r}(t) = x(t)\textbf{i}+ y(t)\textbf{j}\) is a smooth curve). We know that the curve \(−C\) traversed in the opposite direction is parametrized by \(x = x(a+ b − t), y = y(a+ b − t), a ≤ t ≤ b\). Then
\[\nonumber \begin{align} \int_{-C} P(x, y)\,dx&=\int_a^b P(x(a+ b − t), y(a+ b − t))\dfrac{d }{dt}(x(a+ b − t))\,dt \\[4pt] \nonumber &=\int_a^b P(x(a+ b − t), y(a+ b − t)) (−x ′ (a+ b − t))\,dt\text{ (by the Chain Rule)} \\[4pt] \nonumber &=\int_a^b P(x(u), y(u)) (−x ′ (u)) (−du)\text{ (by letting }u = a+ b − t) \\[4pt] \nonumber &= \int_a^b P(x(u), y(u)) x ′ (u)\,du \\[4pt] \nonumber &=-\int_a^b P(x(u), y(u)) x ′ (u)\,du,\text{ since }\int_a^b = -\int_a^b,\text{ so} \\[4pt] \nonumber \int_{-C} P(x, y)\,dx &= -\int_{-C} P(x, y)\,dx \\[4pt] \end{align}\]
since we are just using a different letter \((u)\) for the line integral along \(C\). A similar argument shows that
\[\nonumber \int_{-C} Q(x, y)\,d y = -\int_C Q(x, y)\,d y ,\]
and hence
\[\nonumber \begin{align} \int_{-C}\textbf{f}\cdot d\textbf{r} &= \int_{-C} P(x, y)\,dx+\int_{-C}Q(x, y)\,d y \\[4pt] \nonumber &=-\int_C P(x, y)\,dx + - \int_C Q(x, y)\,d y \\[4pt] \nonumber &=- \left ( \int_C P(x, y)\,dx+ \int_C Q(x, y)\,d y \right ) \\[4pt] \int_{-C} \textbf{f}\cdot d\textbf{r} &= -\int_C \textbf{f}\cdot d\textbf{r}.\label{Eq4.18} \\[4pt] \end{align}\]
The above formula can be interpreted in terms of the work done by a force \(\textbf{f}(x, y)\) (treated as a vector) moving an object along a curve \(C\): the total work performed moving the object along \(C\) from its initial point to its terminal point, and then back to the initial point moving backwards along the same path, is zero. This is because when force is considered as a vector, direction is accounted for.
The preceding discussion shows the importance of always taking the direction of the curve into account when using line integrals of vector fields. For this reason, the curves in line integrals are sometimes referred to as directed curves or oriented curves.
Recall that our definition of a line integral required that we have a parametrization \(x = x(t), y = y(t), a ≤ t ≤ b\) for the curve \(C\). But as we know, any curve has infinitely many parametrizations. So could we get a different value for a line integral using some other parametrization of \(C\), say, \(x = \tilde x(u), y = \tilde y(u), c ≤ u ≤ d\) ? If so, this would mean that our definition is not well-defined. Luckily, it turns out that the value of a line integral of a vector field is unchanged as long as the direction of the curve \(C\) is preserved by whatever parametrization is chosen:
Theorem 4.2
Let \(\textbf{f}(x, y) = P(x, y)\textbf{i} +Q(x, y)\textbf{j}\) be a vector field, and let \(C\) be a smooth curve parametrized by \(x = x(t), y = y(t), a ≤ t ≤ b\). Suppose that \(t = α(u) \text{ for }c ≤ u ≤ d\), such that \(a = α(c), b = α(d), \text{ and }α ′ (u) > 0\) on the open interval \((c,d)\) (i.e. \(α(u)\) is strictly increasing on \([c,d]\)). Then \(\int_C \textbf{f}\cdot d\textbf{r}\) has the same value for the parametrizations \(x = x(t), y = y(t), a ≤ t ≤ b \text{ and }x = \tilde x(u) = x(α(u)), y = \tilde y(u) = y(α(u)), c ≤ u ≤ d\).
Proof: Since \(α(u)\) is strictly increasing and maps \([c,d] \text{ onto }[a,b]\), then we know that \(t = α(u)\) has an inverse function \(u = α^{−1} (t)\) defined on \([a,b]\) such that \(c = α^{−1} (a), d = α^{−1} (b), \text{ and }\dfrac{du}{dt} = \dfrac{1}{ α′ (u)}\). Also, \(dt = α ′ (u)\,du\), and by the Chain Rule
\[\nonumber \tilde x′ (u) = \dfrac{d\tilde x}{ du} = \dfrac{d}{ du} (x(α(u)))=\dfrac{ dx}{ dt}\dfrac{ dt}{ du} = x ′ (t)α ′ (u) \Rightarrow x ′ (t) = \dfrac{\tilde x ′ (u)}{ α′ (u)} \]
so making the substitution \(t = α(u)\) gives
\[\nonumber \begin{align}\int_a^b P(x(t), y(t)) x ′ (t)\,dt &= \int_{α^{−1} (a)}^{α^{−1} (b)} P(x(α(u)), y(α(u)))\dfrac{\tilde x ′ (u)}{ α′ (u)} (α ′ (u)\,du) \\[4pt] \nonumber &= \int_c^d P(\tilde x(u), \tilde y(u)) \tilde x ′ (u)du , \\[4pt] \end{align}\]
which shows that \(\int_C P(x, y)\,dx\) has the same value for both parametrizations. A similar argument shows that \(\int_C Q(x, y)\,d y\) has the same value for both parametrizations, and hence \(\int_C \textbf{f} \cdot d\textbf{r}\) has the same value.
Notice that the condition \(α ′ (u) > 0\) in Theorem 4.2 means that the two parametrizations move along \(C\) in the same direction. That was not the case with the “reverse” parametrization for \(−C: \text{ for }u = a+ b − t\) we have \(t = α(u) = a+ b − u \Rightarrow α ′ (u) = −1 < 0\).
Example 4.4
Evaluate the line integral \(\int_C (x^2 + y^2 )\,dx + 2x y \,d y\) from Example 4.2, Section 4.1, along the curve \(C : x = t, y = 2t^2 , 0 ≤ t ≤ 1\), where \(t = \sin u \text{ for }0 ≤ u ≤ π/2\).
Solution
First, we notice that \(0 = \sin 0, 1 = sin(π/2)\), and \(\dfrac{dt}{du} = \cos u > 0 \text{ on }(0,π/2)\). So by Theorem 4.2 we know that if C is parametrized by
\[\nonumber x = \sin u ,\quad y = 2\sin^2 u ,\quad 0 ≤ u ≤ π/2\]
then \(\int_C (x^2+ y^2 )\,dx+2x y \,d y\) should have the same value as we found in Example 4.2, namely 13 3 . And we can indeed verify this:
\[\nonumber \begin{align} \int_C (x^2 + y^2 )\,dx+2x y \,d y &=\int_0^{2\pi} \left ( (\sin^2 u +(2\sin^2 u)^2 )\cos u +2(\sin u)(2\sin^2 u)4\sin u \cos u \right )\,du \\[4pt] \nonumber &=\int_0^{\pi/2} \left ( \sin^2 u +20\sin^4 u \right )\cos u \,du \\[4pt] \nonumber &= \dfrac{ \sin^3 u}{3} + 4\sin^5 u \Big |_0^{\pi/2} \\[4pt] \nonumber &=\dfrac{1}{3} +4=\dfrac{13}{3} \\[4pt] \end{align}\]
In other words, the line integral is unchanged whether \(t\) or \(u\) is the parameter for \(C\).
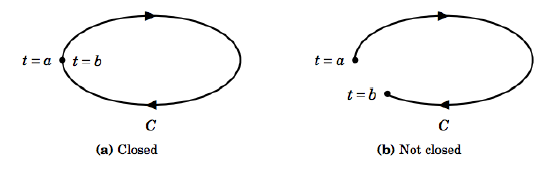
A simple closed curve is a closed curve which does not intersect itself. Note that any closed curve can be regarded as a union of simple closed curves (think of the loops in a figure eight). We use the special notation
\[\nonumber \oint_C f (x, y)\,ds \text{ and }\oint_C \textbf{f}\cdot d\textbf{r}\]
to denote line integrals of scalar and vector fields, respectively, along closed curves. In some older texts you may see the notation  to indicate a line integral traversing a closed curve in a counterclockwise or clockwise direction, respectively.
to indicate a line integral traversing a closed curve in a counterclockwise or clockwise direction, respectively.
So far, the examples we have seen of line integrals (e.g. Example 4.2) have had the same value for different curves joining the initial point to the terminal point. That is, the line integral has been independent of the path joining the two points. As we mentioned before, this is not always the case. The following theorem gives a necessary and sufficient condition for this path independence:
Theorem 4.3
In a region \(R\), the line integral \(\int_C \textbf{f}\cdot d\textbf{r}\) is independent of the path between any two points in \(R\) if and only if \(\oint_C \textbf{f}\cdot d\textbf{r} = 0\) for every closed curve \(C\) which is contained in \(R\).
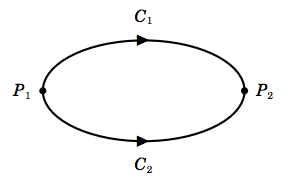
\[\nonumber \begin{align} \int_{C_1}\textbf{f}\cdot d\textbf{r} &=\int_{C_2}\textbf{f}\cdot d\textbf{r} \\[4pt] \nonumber \int_{C_1}\textbf{f}\cdot d\textbf{r} - \int_{C_2}\textbf{f}\cdot d\textbf{r} &=0 \\[4pt] \nonumber \int_{C_1} \textbf{f}\cdot d\textbf{r}+\int_{-C_2}\textbf{f}\cdot d\textbf{r} &=0,\text{ so } \\[4pt] \nonumber \oint_C \textbf{f}\cdot d\textbf{r} &= 0 \\[4pt] \end{align}\]
since \(C = C_1 \cup −C_2 \tag{\(\textbf{QED}\)}\).
Clearly, the above theorem does not give a practical way to determine path independence, since it is impossible to check the line integrals around all possible closed curves in a region. What it mostly does is give an idea of the way in which line integrals behave, and how seemingly unrelated line integrals can be related (in this case, a specific line integral between two points and all line integrals around closed curves).
For a more practical method for determining path independence, we first need a version of the Chain Rule for multivariable functions:
Theorem 4.4. (Chain Rule)
If \(z = f (x, y)\) is a continuously differentiable function of \(x \text{ and }y\), and both \(x = x(t) \text{ and }y = y(t)\) are differentiable functions of \(t\), then \(z\) is a differentiable function of \(t\), and
\[\dfrac{dz}{dt} = \dfrac{∂z}{∂x}\dfrac{ dx}{dt} + \dfrac{∂z}{∂y}\dfrac{ d y}{ dt}\label{Eq4.19}\]
at all points where the derivatives on the right are defined.
The proof is virtually identical to the proof of Theorem 2.2 from Section 2.4 (which uses the Mean Value Theorem), so we omit it. We will now use this Chain Rule to prove the following sufficient condition for path independence of line integrals:
Exercise 4.5
Let \(\textbf{f}(x, y) = P(x, y)\textbf{i}+Q(x, y)\textbf{j}\) be a vector field in some region \(R\), with \(P \text{ and }Q\) continuously differentiable functions on \(R\). Let \(C\) be a smooth curve in \(R\) parametrized by \(x = x(t), y = y(t), a ≤ t ≤ b\). Suppose that there is a real-valued function \(F(x, y)\) such that \(\nabla F = \textbf{f} \text{ on }R\). Then
\[\int_C \textbf{f}\cdot d\textbf{r} = F(B) − F(A) ,\label{Eq4.20}\]
where \(A = (x(a), y(a)) \text{ and }B = (x(b), y(b))\) are the endpoints of \(C\). Thus, the line integral is independent of the path between its endpoints, since it depends only on the values of \(F\) at those endpoints.
Proof: By definition of R \(\int_C \textbf{f}\cdot d\textbf{r}\), we have
\[\nonumber \begin{align} \int_C \textbf{f}\cdot d\textbf{r} &=\int_a^b \left ( P(x(t), y(t)) x ′ (t)+Q(x(t), y(t)) y ′ (t) \right ) \,dt \\[4pt] \nonumber &=\int_a^b \left ( \dfrac{∂F}{∂x} \dfrac{dx}{ dt} + \dfrac{∂F}{∂y}\dfrac{ d y}{ dt} \right ) \,dt \text{ since } \nabla F = \textbf{f} \Rightarrow \dfrac{∂F}{ ∂x} = P \text{ and }\dfrac{∂F}{ ∂y} = Q) \\[4pt] \nonumber &=\int_a^b F ′ (x(t), y(t))\,dt \text{(by the Chain Rule in Theorem 4.4)} \\[4pt] \nonumber &=F(x(t), y(t)) \Big |_a^b = F(B) − F(A) \\[4pt] \end{align}\]
by the Fundamental Theorem of Calculus\(\tag{\(\textbf{QED}\)}\).
Theorem 4.5 can be thought of as the line integral version of the Fundamental Theorem of Calculus. A real-valued function \(F(x, y)\) such that \(\nabla F(x, y) = f(x, y)\) is called a potential for f. A conservative vector field is one which has a potential.
Example 4.5
Recall from Examples 4.2 and 4.3 in Section 4.1 that the line integral \(\int_C (x^2 + y^2 )\,dx + 2x y \,d y\) was found to have the value \(\dfrac{13}{3}\) for three different curves \(C\) going from the point \((0,0)\) to the point \((1,2)\). Use Theorem 4.5 to show that this line integral is indeed path independent.
Solution
We need to find a real-valued function \(F(x, y)\) such that
\[\nonumber \dfrac{∂F}{ ∂x} = x^2+y^2 \text{ and }\dfrac{∂F}{∂y}=2xy.\]
Suppose that \(\dfrac{∂F}{∂x} = x^2 + y^2\), Then we must have \(F(x, y) = \dfrac{1}{3} x^3 + x y^2 + g(y)\) for some function \(g(y)\). So \(\dfrac{∂F}{∂y} = 2x y+ g ′ (y)\) satisfies the condition \(\dfrac{∂F}{∂y} = 2x y \text{ if} g ′ (y) = 0\), i.e. \(g(y) = K\), where \(K\) is a constant. Since any choice for \(K\) will do (why?), we pick \(K = 0\). Thus, a potential \(F(x, y) \text{ for }\textbf{f}(x, y) = (x^2 + y^2 )\textbf{i}+2x y\textbf{j}\) exists, namely
\[\nonumber F(x, y) = \dfrac{1}{3} x^3 + x y^2 .\]
Hence the line integral \(\int_C(x^2 + y^ 2 )\,dx+2x y \,d y\) is path independent. Note that we can also verify that the value of the line integral of f along any curve \(C\) going from \((0,0) \text{ to }(1,2)\) will always be \(\dfrac{13}{3}\), since by Theorem 4.5
\[\nonumber \int_C \textbf{f}\cdot d\textbf{r}=F(1,2) − F(0,0) = \dfrac{1}{3}(1)^3 +(1)(2)^2 -−(0+0) =\dfrac{1}{3}+4=\dfrac{13}{3}.\]
A consequence of Theorem 4.5 in the special case where \C\) is a closed curve, so that the endpoints \(A \text{ and }B\) are the same point, is the following important corollary:
Corollary 4.6.
If a vector field f has a potential in a region \(R\), then \(\oint_C \textbf{f}\cdot d\textbf{r} = 0\) for any closed curve \(C\) in \(R\) (i.e. \(\oint_C \nabla F \cdot d\textbf{r} = 0\) for any real-valued function \(F(x, y))\).
Example 4.6
Evaluate \(\oint_C x \,dx+ y\, d y\) for \(C : x = 2\cos t, y = 3\sin t, 0 ≤ t ≤ 2π\).
Solution:
The vector field \(\textbf{f}(x, y) = x\textbf{i}+ y\textbf{j} \text{ has a potential }F(x, y)\):
\[\nonumber \begin{align}&\dfrac{∂F}{∂x} = x \Rightarrow F(x, y) =\dfrac{1}{2}x^2+g(y) ,\text{ so} \\[4pt] \nonumber &\dfrac{∂F}{∂y}=y \Rightarrow g ′ (y) = y \Rightarrow g(y) = \dfrac{1}{2}y^2+K \\[4pt] \end{align}\]
for any constant \(K, \text{ so }F(x, y) = \dfrac{1}{2} x^2 + \dfrac{1}{2} y^2\) is a potential for \(f(x, y)\). Thus,
\[\nonumber \oint_C x\,dx+y\,dy =\oint_C \textbf{f}\cdot d\textbf{r} =0\]
by Corollary 4.6, since the curve \(C\) is closed (it is the ellipse \(\dfrac{x^2}{ 4} + \dfrac{y^2}{ 9} = 1)\).