
4.1: Basic Definitions
- Page ID
- 19042

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)We shall now consider functions whose domains and ranges are sets in some fixed (but otherwise arbitrary) metric spaces \((S, \rho)\) and \(\left(T, \rho^{\prime}\right),\) respectively. We write
\[f : A \rightarrow\left(T, \rho^{\prime}\right)\]
for a function \(f\) with \(D_{f}=A \subseteq(S, \rho)\) and \(D_{f}^{\prime} \subseteq\left(T, \rho^{\prime}\right) . \quad S\) is called the domain space, and \(T\) the range space, of \(f .\)
I. Given such a function, we often have to investigate its "local behavior" near some point \(p \in S .\) In particular, if \(p \in A=D_{f}(\text { so that } f(p) \text { is defined) we }\) may ask: Is it possible to make the function values \(f(x)\) as near as we like (\(" \varepsilon -\) near") to \(f(p)\) by keeping \(x\) sufficiently close \(\left(\text { "close }^{\prime \prime}\right)\) to \(p,\) i.e., inside some sufficiently small globe \(G_{p}(\delta) ?\) If this is the case, we say that \(f\) is continuous at \(p .\) More precisely, we formulate the following definition.
A function \(f : A \rightarrow\left(T, \rho^{\prime}\right),\) with \(A \subseteq(S, \rho),\) is said to be continuous at \(p\) iff \(p \in A\) and, moreover, for each \(\varepsilon>0\) (no matter how small) there is \(\delta>0\) such that \(\rho^{\prime}(f(x), f(p))<\varepsilon\) for all \(x \in A \cap G_{p}(\delta) .\) In symbols,
\[(\forall \varepsilon>0)(\exists \delta>0)\left(\forall x \in A \cap G_{p}(\delta)\right)\left\{\begin{array}{l}{\rho^{\prime}(f(x), f(p))<\varepsilon, \text { or }} \\ {f(x) \in G_{f(p)}(\varepsilon)}\end{array}\right.\]
If \((1)\) fails, we say that \(f\) is discontinuous at \(p\) and call \(p\) a discontinuity point of \(f .\) This is also the case if \(p \notin A\) (since \(f(p)\) is not defined).
If \((1)\) holds for each p in a set \(B \subseteq A,\) we say that \(f\) is continuous on \(B .\) If this is the case for \(B=A,\) we simply say that \(f\) is continuous.
Sometimes we prefer to keep \(x\) near \(p\) but different from \(p .\) We then replace \(G_{p}(\delta)\) in \((1)\) by the set \(G_{p}(\delta)-\{p\},\) i.e., the globe without its center, denoted \(G_{\neg p}(\delta)\) and called the deleted \(\delta\) -globe about \(p .\) This is even necessary if \(p \notin D_{f}\). Replacing \(f(p)\) in \((1)\) by some \(q \in T,\) we then are led to the following definition.
Given \(f : A \rightarrow\left(T, \rho^{\prime}\right), A \subseteq(S, \rho), p \in S,\) and \(q \in T,\) we say that \(f(x)\) tends to \(q\) as \(x\) tends to \(p(f(x) \rightarrow q \text { as } x \rightarrow p)\) iff for each \(\varepsilon>0\) there is \(\delta>0\) such that \(\rho^{\prime}(f(x), q)<\varepsilon\) for all \(x \in A \cap G_{\neg p}(\delta) .\) In symbols,
\[(\forall \varepsilon>0)(\exists \delta>0)\left(\forall x \in A \cap G_{\neg p}(\delta)\right) \quad\left\{\begin{array}{l}{\rho^{\prime}(f(x), q)<\varepsilon, \text { i.e. }} \\ {f(x) \in G_{q}(\varepsilon)}\end{array}\right.\]
This means that \(f(x)\) is \(\varepsilon\) -close to \(q\) when \(x\) is \(\delta\) -close to \(p\) and \(x \neq p\).
If \((2)\) holds for some \(q,\) we call \(q\) a limit of \(f\) at \(p .\) There may be no such \(q\). We then say that \(f\) has no limit at \(p,\) or that this limit does not exist. If there is only one such \(q(\text { for a given } p),\) we write \(q=\lim _{x \rightarrow p} f(x) .\)
Note 1. Formula (2) holds "vacuously" (see Chapter 1,8 §§1-3, end remark) if \(A \cap G_{\neg p}(\delta)=\emptyset\) for some \(\delta>0 .\) Then any \(q \in T\) is a limit at \(p,\) so a limit exists but is not unique. (We discard the case where \(T\) is a singleton.)
Note 2. However, uniqueness is ensured if \(A \cap G_{\neg p}(\delta) \neq \emptyset\) for all \(\delta>0,\) as we prove below.
Observe that by Corollary 6 of Chapter 3, §14, the set \(A\) clusters at \(p\) iff
\[(\forall \delta>0) \quad A \cap G_{\neg p}(\delta) \neq \emptyset . \quad(\text { Explain! })\]
Thus we have the following corollary.
If \(A\) clusters at \(p\) in \((S, \rho),\) then a function \(f : A \rightarrow\left(T, p^{\prime}\right)\) can have at most one limit at \(p ;\) i.e.
\[\lim _{x \rightarrow p} f(x) \text{ is unique (if it exists).}\]
In particular, this holds if \(A \supseteq(a, b) \subset E^{1}(a<b)\) and \(p \in[a, b]\).
- Proof
-
Suppose \(f\) has \(t w o\) limits, \(q\) and \(r,\) at \(p .\) By the Hausdorff property,
\[G_{q}(\varepsilon) \cap G_{r}(\varepsilon)=\emptyset \quad \text{ for some } \varepsilon>0.\]
Also, by \((2),\) there are \(\delta^{\prime}, \delta^{\prime \prime}>0\) such that
\[\begin{array}{ll}{\left(\forall x \in A \cap G_{\neg p}\left(\delta^{\prime}\right)\right)} & {f(x) \in G_{q}(\varepsilon) \text { and }} \\ {\left(\forall x \in A \cap G_{\neg p}\left(\delta^{\prime \prime}\right)\right)} & {f(x) \in G_{r}(\varepsilon)}\end{array}\]
Let \(\delta=\min \left(\delta^{\prime}, \delta^{\prime \prime}\right) .\) Then for \(x \in A \cap G_{\neg p}(\delta), f(x)\) is in both \(G_{q}(\varepsilon)\) and \(G_{r}(\varepsilon)\), and such an \(x\) exists since \(A \cap G_{\neg p}(\delta) \neq \emptyset\) by assumption.
But this is impossible since \(G_{q}(\varepsilon) \cap G_{r}(\varepsilon)=\emptyset\) \((\text { a contradiction!). } \square\)
For intervals, see Chapter 3, §14, Example ( \(\mathrm{h} )\).
\(f\) is continuous at \(p\left(p \in D_{f}\right)\) iff \(f(x) \rightarrow f(p)\) as \(x \rightarrow p\).
- Proof
-
The straightforward proof from definitions is left to the reader.
Note 3. In formula \((2),\) we excluded the case \(x=p\) by assuming that \(x \in A \cap G_{\neg p}(\delta) .\) This makes the behavior of \(f\) at \(p\) itself irrelevant. Thus for the existence of a limit \(q\) at \(p,\) it does not matter whether \(p \in D_{f}\) or whether \(f(p)=q .\) But both conditions are required for continuity at \(p\) (see Corollary 2 and Definition 1\()\).
Note 4. Observe that if \((1)\) or \((2)\) holds for some \(\delta,\) it certainly holds for any \(\delta^{\prime} \leq \delta .\) Thus we may always choose \(\delta\) as small as we like. Moreover, as \(x\) is limited to \(G_{p}(\delta),\) we may disregard, or change at will, the function values \(f(x)\) for \(x \notin G_{p}(\delta)\) ("local character of the limit notion").
II. Limits in E*. If \(S\) or \(T\) is \(E^{*}\left(\text { or } E^{1}\right),\) we may let \(x \rightarrow \pm \infty\) or \(f(x) \rightarrow \pm \infty .\) For a precise definition, we rewrite \((2)\) in terms of \(globes\) \(G_{p}\) and \(G_{q} :\)
\[\left(\forall G_{q}\right)\left(\exists G_{p}\right)\left(\forall x \in A \cap G_{\neg p}\right) \quad f(x) \in G_{q}.\]
This makes sense also if \(p=\pm \infty\) or \(q=\pm \infty .\) We only have to use our conventions as to \(G_{ \pm \infty},\) or the metric \(\rho^{\prime}\) for \(E^{*},\) as explained in Chapter 3, §11.
For example, consider
\[^{\prime \prime}f(x) \rightarrow q \text{ as } x \rightarrow+\infty^{\prime \prime}\left(A \subseteq S=E^{*}, p=+\infty, q \in\left(T, \rho^{\prime}\right)\right).\]
Here \(G_{p}\) has the form \((a,+\infty], a \in E^{1},\) and \(G_{\neg p}=(a,+\infty),\) while \(G_{q}=G_{q}(\varepsilon)\), as usual. Noting that \(x \in G_{\neg p}\) means \(x>a\left(x \in E^{1}\right),\) we can rewrite \(\left(2^{\prime}\right)\) as
\[(\forall \varepsilon>0)\left(\exists a \in E^{1}\right)(\forall x \in A | x>a) \quad f(x) \in G_{q}(\varepsilon), \text{ or } \rho^{\prime}(f(x), q)<\varepsilon.\]
This means that \(f(x)\) becomes arbitrarily close to \(q\) for large \(x(x>a)\).
Next consider \(^{4} f(x) \rightarrow+\infty\) as \(x \rightarrow-\infty\) " Here \(G_{\neg p}=(-\infty, a)\) and \(G_{q}=(b,+\infty] .\) Thus formula \(\left(2^{\prime}\right)\) yields (with \(S=T=E^{*},\) and \(x\) varying over \(E^{\mathrm{i}} )\)
\[\left(\forall b \in E^{1}\right)\left(\exists a \in E^{1}\right)(\forall x \in A | x<a) \quad f(x)>b;\]
similarly in other cases, which we leave to the reader.
Note 5. In \((3),\) we may take \(A=N\) (the naturals). Then \(f : N \rightarrow\left(T, \rho^{\prime}\right)\) is a sequence in \(T .\) Writing \(m\) for \(x,\) set \(u_{m}=f(m)\) and \(a=k \in N\) to obtain
\[(\forall \varepsilon>0)(\exists k)(\forall m>k) \quad u_{m} \in G_{q}(\varepsilon) ; \text{ i.e., } \rho^{\prime}\left(u_{m}, q\right)<\varepsilon.\]
This coincides with our definition of the limit \(q\) of a sequence \(\left\{u_{m}\right\}\) (see Chapter 3, §14). Thus limits of sequences are a special case of function limits. Theorems on sequences can be obtained from those on functions \(f : A \rightarrow\left(T, \rho^{\prime}\right)\) by simply taking \(A=N\) and \(S=E^{*}\) as above.
Note 6. Formulas \((3)\) and \((4)\) make sense sense also if \(S=E^{1}\) (respectively, \(S=T=E^{1} )\) since they do not involve any mention of \(\pm \infty .\) We shall use such formulas also for functions \(f : A \rightarrow T,\) with \(A \subseteq S \subseteq E^{1}\) or \(T \subseteq E^{1},\) as the case may be.
III. Relative Limits and Continuity. Sometimes the desired result \((1)\) or \((2)\) does not hold in full, but only with \(A\) replaced by a smaller set \(B \subseteq A\). Thus we may have
\[(\forall \varepsilon>0)(\exists \delta>0)\left(\forall x \in B \cap G_{\neg p}(\delta)\right) \quad f(x) \in G_{q}(\varepsilon).\]
In this case, we call \(q\) a relative limit of \(f\) at \(p\) over \(B\) and write
\["f(x) \rightarrow q \text{ as } x \rightarrow p \text{ over } B"\]
or
\[\lim _{x \rightarrow p, x \in B} f(x)=q \quad(\text { if } q \text { is unique });\]
\(B\) is called the path over which \(x\) tends to \(p .\) If, in addition, \(p \in D_{f}\) and \(q=f(p),\) we say that \(f\) is relatively continuous at \(p\) over \(B ;\) then \((1)\) holds with \(A\) replaced by \(B\). Again, if this holds for every \(p \in B,\) we say that \(f\) is relatively continuous on \(B .\) Clearly, if \(B=A=D_{f},\) this yields ordinary (nonrelative) limits and continuity. Thus relative limits and continuity are more general.
Note that for limits over a path \(B, x\) is chosen from \(B\) or \(B-\{p\}\) only. Thus the behavior of \(f\) outside \(B\) becomes irrelevant, and so we may arbitrarily redefine \(f\) on \(-B .\) For example, if \(p \notin B\) but \(\lim _{x \rightarrow p, x \in B} f(x)=q\) exists, we may define \(f(p)=q,\) thus making \(f\) relatively continuous at \(p(\text { over } B) .\) We also may replace \((S, \rho)\) by \((B, \rho)(\text { if } p \in B),\) or restrict \(f\) to \(B,\) i.e., replace \(f\) by the function \(g : B \rightarrow\left(T, \rho^{\prime}\right)\) defined by \(g(x)=f(x)\) for \(x \in B\) (briefly, \(g=f\) on \(B )\).
A particularly important case is
\[A \subseteq S \subseteq E^{*}, \text{ e.g., } S=E^{1}.\]
Then inequalities are defined in \(S,\) so we may take
\[B=\{x \in A | x<p\} \text{ (points in } A, \text{ preceding } p).\]
Then, writing \(G_{q}\) for \(G_{q}(\varepsilon)\) and \(a=p-\delta,\) we obtain from formula \((2)\)
\[\left(\forall G_{q}\right)(\exists a<p)(\forall x \in A | a<x<p) \quad f(x) \in G_{q}.\]
If \((5)\) holds, we call \(q\) a left limit of \(f\) at \(p\) and write
\["f(x) \rightarrow q \text{ as } x \rightarrow p^{-}" \quad\left(" x \text { tends to } p \text{ from the left}^{\prime}\right).\]
If, in addition, \(q=f(p),\) we say that \(f\) is left continuous at \(p .\) Similarly, taking
\[B=\{x \in A | x>p\},\]
we obtain right limits and continuity. We write
\[f(x) \rightarrow q \text{ as } x \rightarrow p^{+}\]
iff \(q\) is a right limit of \(f\) at \(p,\) i.e., if \((5)\) holds with all inequalities reversed.
If the set \(B\) in question clusters at \(p,\) the relative limit (if any) is unique. We then denote the left and right limit, respectively, by \(f\left(p^{-}\right)\) and \(f\left(p^{+}\right),\) and we write
\[\lim _{x \rightarrow p^{-}} f(x)=f\left(p^{-}\right) \text{ and } \lim _{x \rightarrow p^{+}} f(x)=f\left(p^{+}\right).\]
With the previous notation, if \(f(x) \rightarrow q\) as \(x \rightarrow p\) over a path \(B,\) and also over \(D,\) then \(f(x) \rightarrow q\) as \(x \rightarrow p\) over \(B \cup D\).
Hence if \(D_{f} \subseteq E^{*}\) and \(p \in E^{*},\) we have
\[q=\lim _{x \rightarrow p} f(x) \text{ iff } q=f\left(p^{-}\right)=f\left(p^{+}\right) . \quad(\text { Exercise! })\]
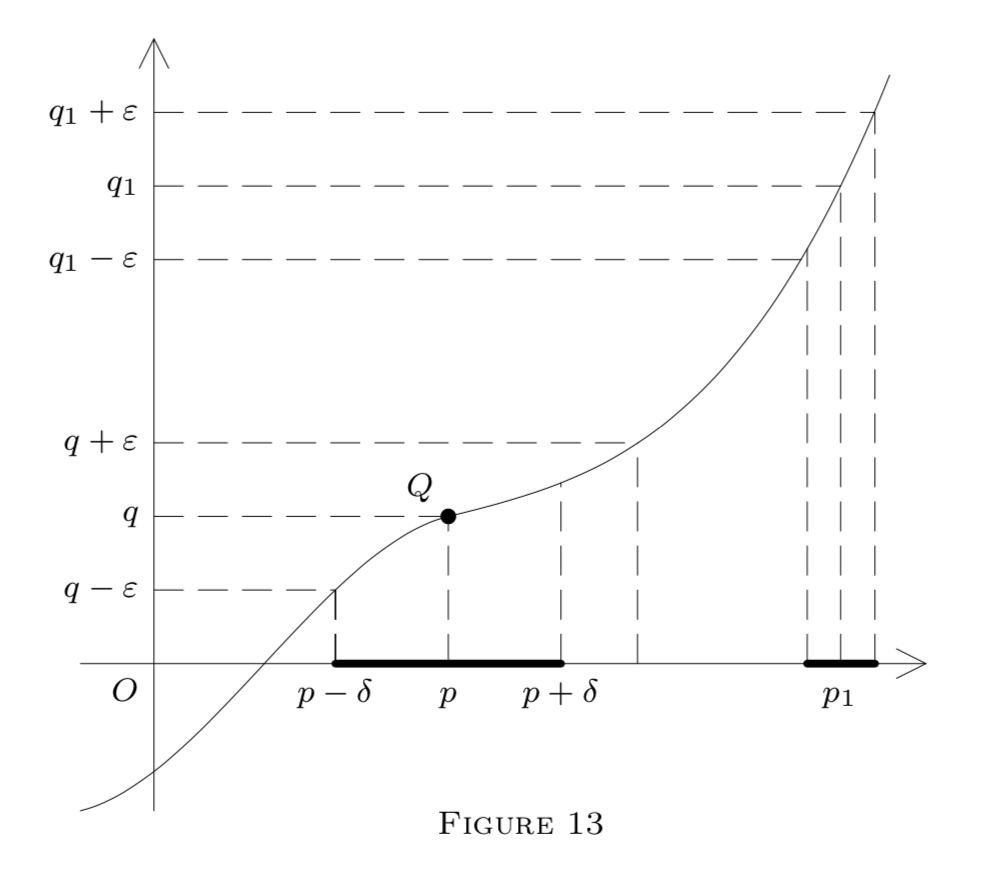
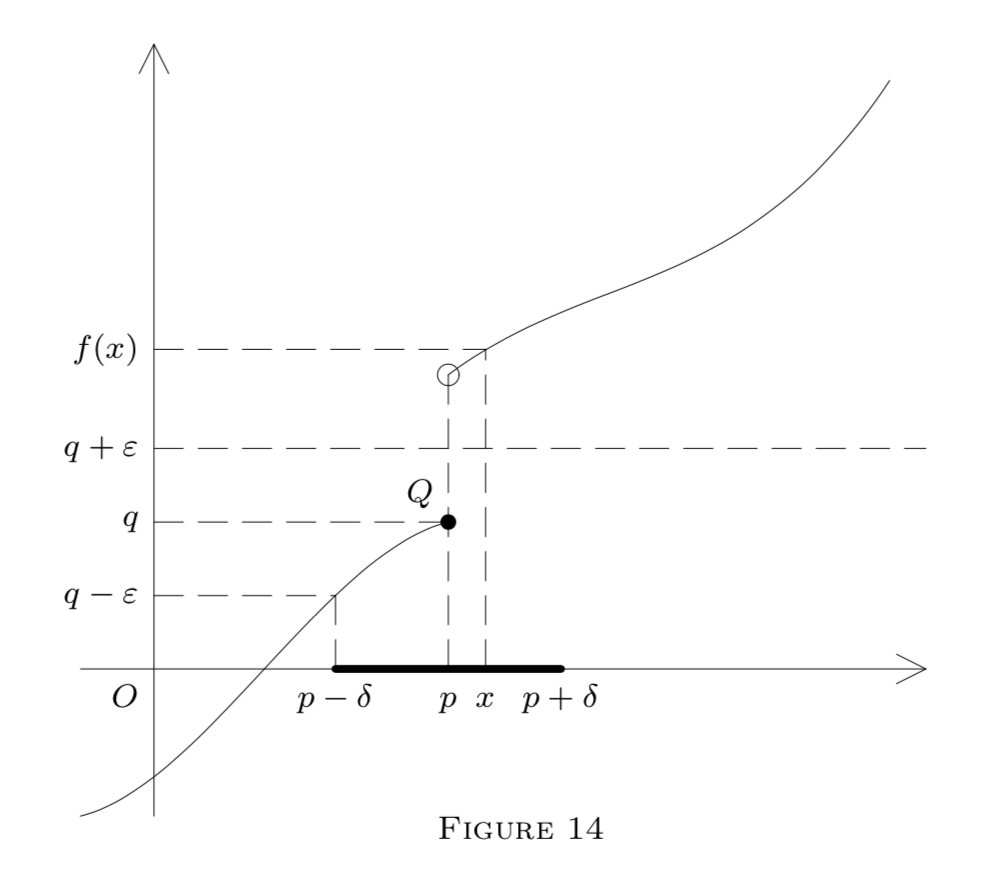
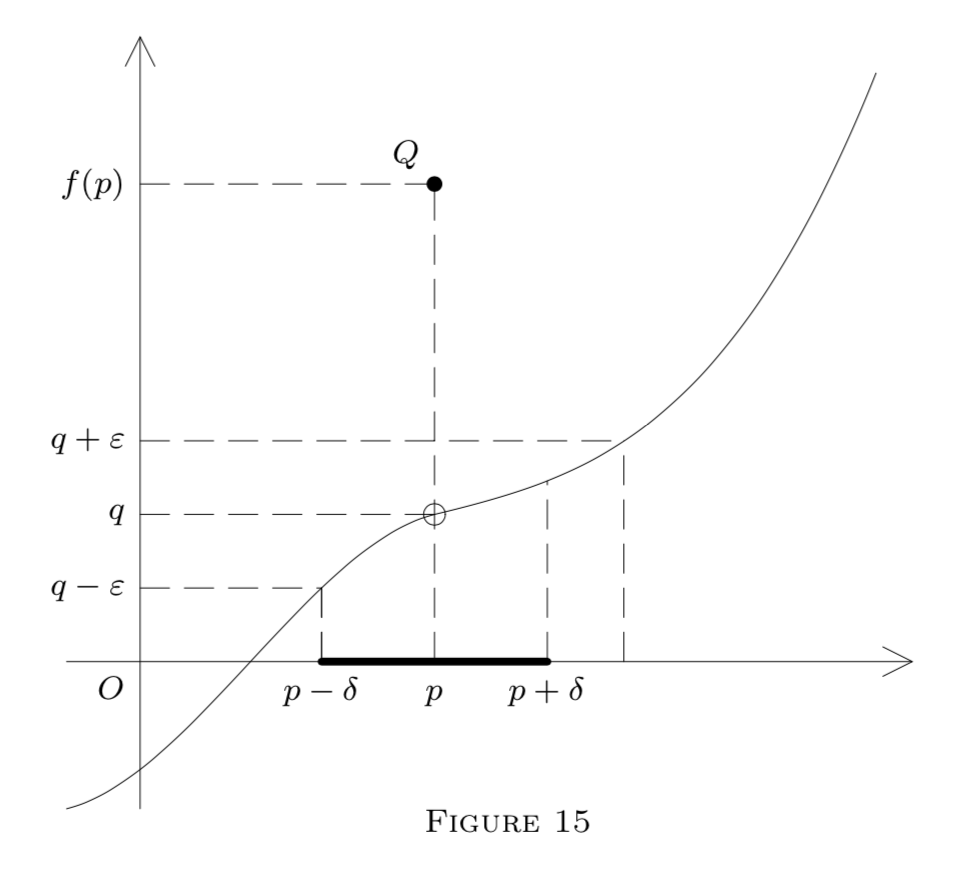
We now illustrate our definitions by a diagram in \(E^{2}\) representing a function \(f : E^{1} \rightarrow E^{1}\) by its graph, i.e., points \((x, y)\) such that \(y=f(x)\).
Here
\[G_{q}(\varepsilon)=(q-\varepsilon, q+\varepsilon)\]
is an interval on the \(y\) -axis. The dotted lines show how to construct an interval
\[(p-\delta, p+\delta)=G_{p}\]
on the \(x\) -axis, satisfying formula \((1)\) in Figure \(13,\) formulas \((5)\) and \((6)\) in Figure \(14,\) or formula \((2)\) in Figure \(15 .\) The point \(Q\) in each diagram belongs to the graph; i.e., \(Q=(p, f(p)) .\) In Figure \(13, f\) is continuous at \(p(\text { and also at }\) \(p_{1}\) ). However, it is only left-continuous at \(p\) in Figure \(14,\) and it is discontinuous at \(p\) in Figure \(15,\) though \(f\left(p^{-}\right)\) and \(f\left(p^{+}\right)\) exist. (Why?)
(a) Let \(f : A \rightarrow T\) be constant on \(B \subseteq A ;\) i.e.
\[f(x)=q \text{ for a fixed } q \in T \text{ and all } x \in B.\]
Then \(f\) is relatively continuous on \(B,\) and \(f(x) \rightarrow q\) as \(x \rightarrow p\) over \(B,\) at each \(p .\) (Given \(\varepsilon>0,\) take an arbitrary \(\delta>0\). Then
\[\left(\forall x \in B \cap G_{\neg p}(\delta)\right) \quad f(x)=q \in G_{q}(\varepsilon),\]
as required; similarly for continuity.)
(b) Let \(f\) be the \(i\) dentity map on \(A \subset(S, \rho) ;\) i.e.,
\[(\forall x \in A) \quad f(x)=x.\]
Then, given \(\varepsilon>0,\) take \(\delta=\varepsilon\) to obtain, for \(p \in A\),
\[\left(\forall x \in A \cap G_{p}(\delta)\right) \quad \rho(f(x), f(p))=\rho(x, p)<\delta=\varepsilon.\]
Thus by \((1), f\) is continuous at any \(p \in A,\) hence on \(A\).
(c) Define \(f : E^{1} \rightarrow E^{1}\) by
\[f(x)=1 \text{ if } x \text{ is rational, and } f(x)=0 \text{ otherwise.}\]
(This is the Dirichlet function, so named after Johann Peter Gustav Lejeune Dirichlet.)
No matter how small \(\delta\) is, the globe
\[G_{p}(\delta)=(p-\delta, p+\delta)\]
(even the deleted globe) contains both rationals and irrationals. Thus as \(x\) varies over \(G_{\neg p}(\delta), f(x)\) takes on both values, 0 and \(1,\) many times and so gets out of any \(G_{q}(\varepsilon),\) with \(q \in E^{1}, \varepsilon<\frac{1}{2}\).
Hence for any \(q, p \in E^{1},\) formula \((2)\) fails if we take \(\varepsilon=\frac{1}{4},\) say. Thus \(f\) has no limit at any \(p \in E^{1}\) and hence is discontinuous everywhere! However, \(f\) is relatively continuous on the set \(R\) of all rationals by Example \((\mathrm{a})\).
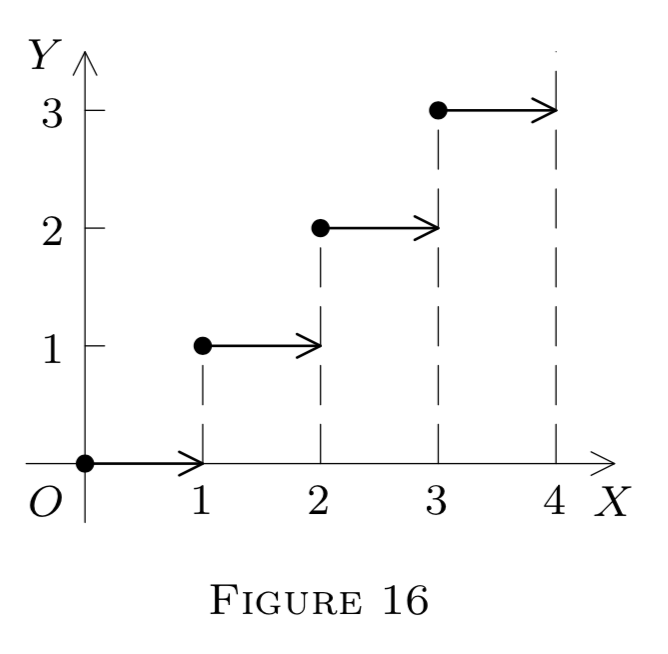
(d) Define \(f : E^{1} \rightarrow E^{1}\) by
\[f(x)=[x](=\text { the integral part of } x ; \text { see Chapter } 2, §10).\]
Thus \(f(x)=0\) for \(x \in[0,1), f(x)=1\) for \(x \in[1,2),\) etc. Then \(f\) is discontinuous at \(p\) if \(p\) is an integer (why?) but continuous at any other \(p\left(\text { restrict } f \text { to a small } G_{p}(\delta) \text { so as to make it constant) }\right.\)
However, left and right limits exist at each \(p \in E^{1},\) even if \(p=\) \(n(\text { an integer }) .\) In fact,
\[f(x)=n, x \in(n, n+1)\]
and
\[f(x)=n-1, x \in(n-1, n),\]
hence \(f\left(n^{+}\right)=n\) and \(f\left(n^{-}\right)=\) \(n-1 ; f\) is right continuous on \(E^{1} .\) See Figure \(16 .\)
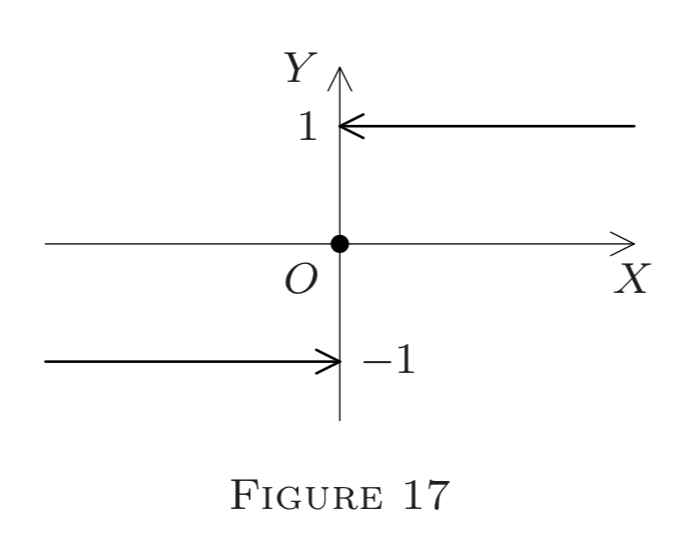
(e) Define \(f : E^{1} \rightarrow E^{1}\) by
\[f(x)=\frac{x}{|x|} \text{ if } x \neq 0, \text{ and } f(0)=0.\]
(This is the so-called signum function, often denoted by sgn.)
Then (Figure 17\()\)
\[f(x)=-1 \text{ if } x<0\]
and
\[f(x)=1 \text{ if } x>0.\]
Thus, as in ( d ), we infer that \(f\) is discontinuous at \(0,\) but continuous at each \(p \neq 0 .\) Also, \(f\left(0^{+}\right)=1\) and \(f\left(0^{-}\right)=-1 .\) Redefining \(f(0)=1\) or \(f(0)=-1,\) we can make \(f\) right (respectively, left) continuous at \(0,\) but not both.
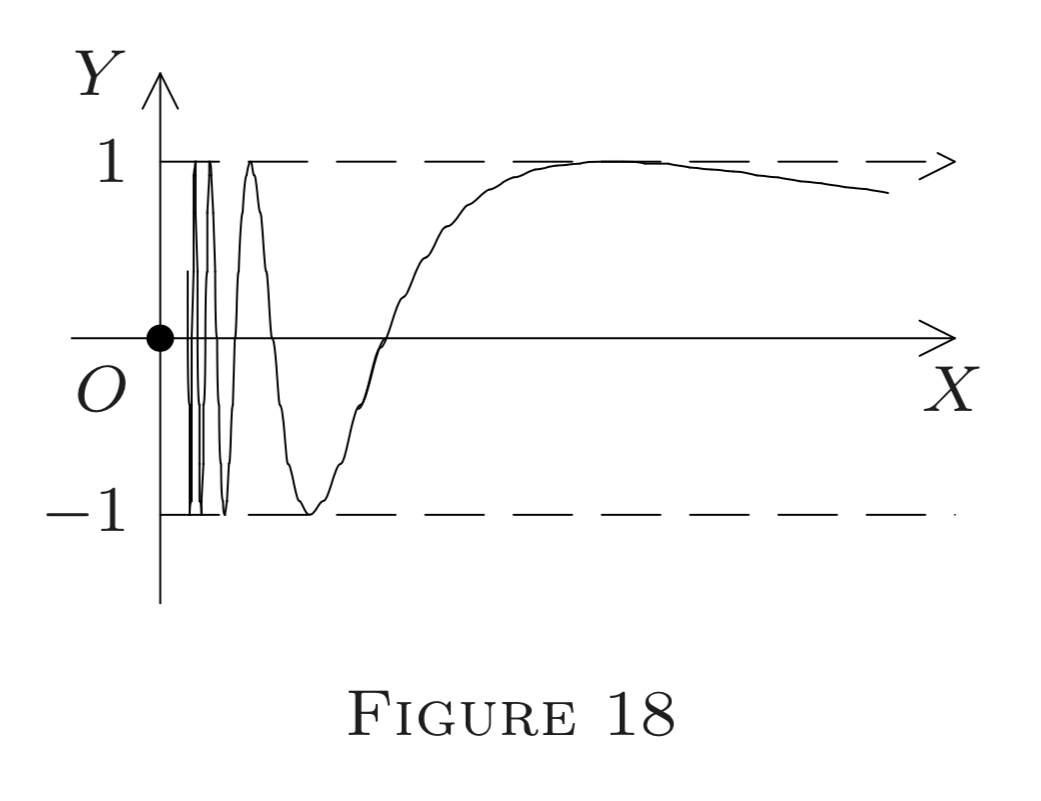
(f) Define \(f : E^{1} \rightarrow E^{1}\) by (see Figure 18\()\)
\[f(x)=\sin \frac{1}{x} \text{ if } x \neq 0, \text{ and } f(0)=0.\]
Any globe \(G_{0}(\delta)\) about 0 contains points at which \(f(x)=1,\) as well as those at which \(f(x)=-1\) or \(f(x)=0\) (take \(x=2 /(n \pi)\) for large integers \(n )\); in fact, the graph "oscillates" infinitely many times between \(-1\) and \(1 .\) Thus by the same argument as in \((\mathrm{c}), f\) has no limit at 0 (not even a left or right limit) and hence is discontinuous at \(0 .\) No attempt at redefining \(f\) at 0 can restore even left or right continuity, let alone ordinary continuity, at \(0 .\)
(g) Define \(f : E^{2} \rightarrow E^{1} \mathrm{by}\)
\[f(\overline{0})=0 \text{ and } f(\overline{x})=\frac{x_{1} x_{2}}{x_{1}^{2}+x_{2}^{2}} \text{ if } \overline{x}=\left(x_{1}, x_{2}\right) \neq \overline{0}.\]
Let \(B\) be any line in \(E^{2}\) through \(\overline{0},\) given parametrically by
\[\overline{x}=t \vec{u}, \quad t \in E^{1}, \vec{u} \text{ fixed (see Chapter 3, §§4-6 ),}\]
so \(x_{1}=t u_{1}\) and \(x_{2}=t u_{2} .\) As is easily seen, for \(\overline{x} \in B, f(\overline{x})=f(\overline{u})\) (constant) if \(\overline{x} \neq \overline{0} .\) Hence
\[\left(\forall \overline{x} \in B \cap G_{\neg \overline{0}}(\delta)\right) \quad f(\overline{x})=f(\overline{u}),\]
i.e., \(\rho(f(\overline{x}), f(\overline{u}))=0<\varepsilon,\) for any \(\varepsilon>0\) and any deleted globe about \(\overline{0}\).
By \(\left(2^{\prime}\right),\) then, \(f(\overline{x}) \rightarrow f(\overline{u})\) as \(\overline{x} \rightarrow \overline{0}\) over the path \(B .\) Thus \(f\) has a relative limit \(f(\overline{u})\) at \(\overline{0},\) over any line \(\overline{x}=t \overline{u},\) but this limit is different for various choices of \(\overline{u},\) i.e., for different lines through \(\overline{0} .\) No ordinary limit at \(\overline{0}\) exists (why?); \(f\) is not even relatively continuous at \(\overline{0}\) over the line \(\overline{x}=t \vec{u}\) unless \(f(\overline{u})=0\) (which is the case only if the line is one of the coordinate axes (why?)).