
10.4: The Cross Product
- Page ID
- 4216

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)"Orthogonality'' is immensely important. A quick scan of your current environment will undoubtedly reveal numerous surfaces and edges that are perpendicular to each other (including the edges of this page). The dot product provides a quick test for orthogonality: vectors \(\vec u\) and \(\vec v\) are perpendicular if, and only if, \(\vec u \cdot \vec v=0\).
Given two non-parallel, nonzero vectors \(\vec u\) and \(\vec v\) in space, it is very useful to find a vector \(\vec w\) that is perpendicular to both \(\vec u\) and \(\vec v\). There is a operation, called the cross product, that creates such a vector. This section defines the cross product, then explores its properties and applications.
Definition 61 Cross product
Let \(\vec u =\langle u_1,u_2,u_3\rangle\) and \(\vec v = \langle v_1,v_2,v_3\rangle\) be vectors in \(\mathbb{R}^3\). The cross product of \(\vec u\) and \(\vec v\), denoted \(\vec u \times \vec v\), is the vector
\[\vec u \times \vec v = \langle u_2v_3-u_3v_2,-(u_1v_3-u_3v_1),u_1v_2-u_2v_1\rangle.\]
This definition can be a bit cumbersome to remember. After an example we will give a convenient method for computing the cross product. For now, careful examination of the products and differences given in the definition should reveal a pattern that is not too difficult to remember. (For instance, in the first component only 2 and 3 appear as subscripts; in the second component, only 1 and 3 appear as subscripts. Further study reveals the order in which they appear.)
Let's practice using this definition by computing a cross product.
Example \(\PageIndex{1}\): Computing a cross product
Let \(\vec u = \langle 2,-1,4\rangle\) and \(\vec v = \langle 3,2,5\rangle\). Find \(\vec u \times \vec v\), and verify that it is orthogonal to both \(\vec u\) and \(\vec v\).
Solution
Using Definition 61, we have
\[\vec u \times \vec v = \langle (-1)5-(4)2,-\left((2)5-(4)3\right) , (2)2-(-1)3\rangle = \langle -13,2,7\rangle.\]
(We encourage the reader to compute this product on their own, then verify their result.)
We test whether or not \(\vec u \times \vec v\) is orthogonal to \(\vec u\) and \(\vec v\) using the dot product:
\[\left(\vec u \times \vec v\right) \cdot \vec u = \langle -13,2,7\rangle \cdot \langle 2,-1,4\rangle = 0,\]
\[\left(\vec u \times \vec v\right) \cdot \vec v = \langle -13,2,7\rangle \cdot \langle 3,2,5 \rangle = 0.\]
Since both dot products are zero, \(\vec u \times \vec v\) is indeed orthogonal to both \(\vec u\) and \(\vec v\).
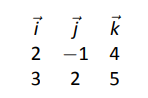
A convenient method of computing the cross product starts with forming a particular \(3\times 3\) matrix, or rectangular array. The first row comprises the standard unit vectors \(\vec i\), \(\vec j\), and \(\vec k\). The second and third rows are the vectors \(\vec u\) and \(\vec v\), respectively. Using \(\vec u\) and \(\vec v\) from Example 10.4.1, we begin with:
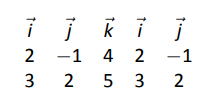
Now repeat the first two columns after the original three:
This gives three full "upper left to lower right'' diagonals, and three full "upper right to lower left'' diagonals, as shown. Compute the products along each diagonal, then add the products on the right and subtract the products on the left:
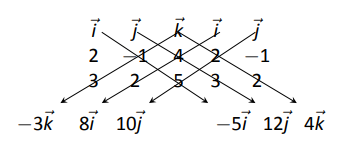
\[\vec u \times \vec v = \left(-5\vec i+12\vec j+4\vec k\,\right) - \left(-3\vec k+8\vec i+10\vec j\,\right) = -13\vec i+2\vec j+7\vec k = \langle -13,2,7\rangle.\]
We practice using this method.
Example \(\PageIndex{2}\): Computing a cross product
Let \(\vec u=\langle 1,3,6\rangle\) and \(\vec v = \langle -1,2,1\rangle\). Compute both \(\vec u \times \vec v\) and \(\vec v \times \vec u\).
Solution
To compute \(\vec u \times \vec v\), we form the matrix as prescribed above, complete with repeated first columns:
\[\begin{array}{ccccc} \ \vec i\ &\ \vec j\ &\ \vec k\ &\ \vec i\ &\ \vec j\ \\ 1&3&6&1&3\\-1&2&1&-1&2\end{array}\]
We let the reader compute the products of the diagonals; we give the result:
\[\vec u \times \vec v = \left(3\vec i-6\vec j+2\vec k\,\right) - \left(-3\vec k + 12\vec i+\vec j\,\right) = \langle -9,-7,5\rangle.\]
To compute \(\vec v \times \vec u\), we switch the second and third rows of the above matrix, then multiply along diagonals and subtract:
\[\begin{array}{ccccc} \ \vec i\ &\ \vec j\ &\ \vec k\ &\ \vec i\ &\ \vec j\ \\-1&2&1&-1&2\\ 1&3&6&1&3\end{array}\]
Note how with the rows being switched, the products that once appeared on the right now appear on the left, and vice--versa. Thus the result is:
\[\vec v \times \vec u = \left(12\vec i+\vec j-3\vec k\,\right) - \left(2\vec k + 3\vec i-6\vec j\,\right) = \langle 9,7,-5\rangle,\]
which is the opposite of \(\vec u \times \vec v\). We leave it to the reader to verify that each of these vectors is orthogonal to \(\vec u\) and \(\vec v\).
Properties of the Cross Product
It is not coincidence that \(\vec v \times \vec u = -(\vec u \times \vec v)\) in the preceding example; one can show using Definition 61 that this will always be the case. The following theorem states several useful properties of the cross product, each of which can be verified by referring to the definition.
THEOREM 87 PROPERTIES OF THE CROSS PRODUCT
Let \(\vec u\), \(\vec v\) and \(\vec w\) be vectors in \(\mathbb{R}^3\) and let \(c\) be a scalar. The following identities hold:
- \(\vec u \times \vec v = -(\vec v \times \vec u)\) Anticommutative Property
- (a) \((\vec u+\vec v)\times \vec w = \vec u \times \vec w+\vec v \times \vec w\) Distributive Properties
(b) \(\vec u \times (\vec v+\vec w) = \vec u \times \vec v+\vec u \times \vec w\) - \(c(\vec u \times \vec v) = (c\vec u) \times \vec v = \vec u \times (c\vec v)\)
- (a) \(\vec u \times \vec v)\cdot \vec u = 0\) Orthogonality Properties
(b) \((\vec u \times \vec v)\cdot \vec v = 0\) - \(\vec u \times \vec u = \vec 0\)
- \(\vec u \times \vec 0 = \vec 0\)
- \(\vec u \cdot (\vec v\times\vec w) = (\vec u \times \vec v)\cdot \vec w\) Triple Scalar Product
We introduced the cross product as a way to find a vector orthogonal to two given vectors, but we did not give a proof that the construction given in Definition 61 satisfies this property. Theorem 87 asserts this property holds; we leave it as a problem in the Exercise section to verify this.
Property 5 from the theorem is also left to the reader to prove in the Exercise section, but it reveals something more interesting than "the cross product of a vector with itself is \(\vec 0\).'' Let \(\vec u\) and \(\vec v\) be parallel vectors; that is, let there be a scalar \(c\) such that \(\vec v = c\vec u\). Consider their cross product:
\[\begin{align*}
\vec u \times \vec v &= \vec u \times (c\vec u) \quad &&\\
&= c(\vec u \times \vec u)\quad &&\text{(by Property 3 of Theorem 87)}\\
&= \vec 0.\quad &&\text{(by Property 5 of Theorem 87)}
\end{align*}\]
We have just shown that the cross product of parallel vectors is \(\vec 0\). This hints at something deeper. Theorem 86 related the angle between two vectors and their dot product; there is a similar relationship relating the cross product of two vectors and the angle between them, given by the following theorem.
THEOREM 88 THE CROSS PRODUCT AND ANGLES
Let \(\vec u\) and \(\vec v\) be vectors in \(\mathbb{R}^3\). Then
\[\norm{\vec u \times \vec v} = \norm u\, \norm v \sin\theta,\]
where \(\theta\), \(0\leq \theta \leq \pi\), is the angle between \(\vec u\) and \(\vec v\).
Note: Definition 58 (through Theorem 86) defines \(\vec u\) and \(\vec v\) to be orthogonal if \(\vec u\cdot\vec v=0\). We could use Theorem 88 to define \(\vec u\) and \(\vec v\) are parallel if \(\vec u\times \vec v = 0\). By such a definition, \(\vec 0\) would be both orthogonal and parallel to every vector. Apparent paradoxes such as this are not uncommon in mathematics and can be very useful.
Note that this theorem makes a statement about the magnitude of the cross product. When the angle between \(\vec u\) and \(\vec v\) is 0 or \(\pi\) (i.e., the vectors are parallel), the magnitude of the cross product is 0. The only vector with a magnitude of 0 is \(\vec 0\) (see Property 9 of Theorem 84), hence the cross product of parallel vectors is \(\vec 0\).
We demonstrate the truth of this theorem in the following example.
Example \(\PageIndex{3}\): The cross product and angles
Let \(\vec u = \langle 1,3,6\rangle\) and \(\vec v = \langle -1,2,1\rangle\) as in Example 10.4.2. Verify Theorem 88 by finding \(\theta\), the angle between \(\vec u\) and \(\vec v\), and the magnitude of \(\vec u \times \vec v\).
Solution
We use Theorem 86 to find the angle between \(\vec u\) and \(\vec v\).
\begin{align*}
\theta &= \cos^{-1}\left(\frac{\vec u \cdot \vec v}{\norm u\, \norm v}\right) \\
&= \cos^{-1}\left(\frac{11}{\sqrt{46}\sqrt{6}}\right)\\
&\approx 0.8471 = 48.54^\circ.
\end{align*}
Our work in Example 10.4.2 showed that \(\vec u \times \vec v = \langle -9,-7,5\rangle\), hence \(\norm{\vec u \times \vec v} = \sqrt{155}.\) Is \(\norm{\vec u \times \vec v} = \norm u\, \norm v\sin\theta\)? Using numerical approximations, we find:
\[\begin{align*}
\norm{\vec u \times \vec v} &=\sqrt{155} & \norm u\,\norm v \sin\theta & = \sqrt{46}\sqrt{6}\sin 0.8471\\
&\approx 12.45. & &\approx 12.45.
\end{align*}\]
Numerically, they seem equal. Using a right triangle, one can show that
\[\sin\left(\cos^{-1}\left(\frac{11}{\sqrt{46}\sqrt{6}}\right)\right) = \frac{\sqrt{155}}{\sqrt{46}\sqrt{6}},\]
|which allows us to verify the theorem exactly.
Right Hand Rule
The anticommutative property of the cross product demonstrates that \(\vec u \times \vec v\) and \(\vec v \times \vec u\) differ only by a sign -- these vectors have the same magnitude but point in the opposite direction. When seeking a vector perpendicular to \(\vec u\) and \(\vec v\), we essentially have two directions to choose from, one in the direction of \(\vec u \times \vec v\) and one in the direction of \(\vec v \times \vec u\). Does it matter which we choose? How can we tell which one we will get without graphing, etc.?
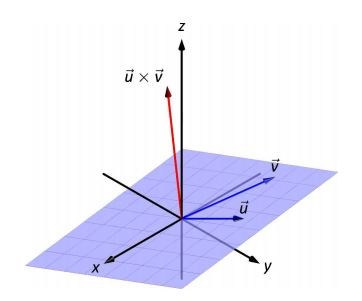
Another wonderful property of the cross product, as defined, is that it follows the right hand rule. Given \(\vec u\) and \(\vec v\) in \(\mathbb{R}^3\) with the same initial point, point the index finger of your right hand in the direction of \(\vec u\) and let your middle finger point in the direction of \(\vec v\) (much as we did when establishing the right hand rule for the 3-dimensional coordinate system). Your thumb will naturally extend in the direction of \(\vec u \times \vec v\). One can "practice'' this using Figure 10.39. If you switch, and point the index finder in the direction of \(\vec v\) and the middle finger in the direction of \(\vec u\), your thumb will now point in the opposite direction, allowing you to "visualize'' the anticommutative property of the cross product.
Applications of the Cross Product
There are a number of ways in which the cross product is useful in mathematics, physics and other areas of science beyond "just'' finding a vector perpendicular to two others. We highlight a few here.
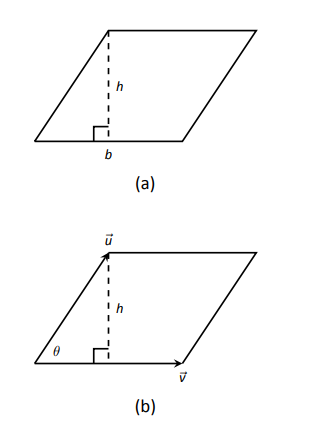
Area of a Parallelogram
It is a standard geometry fact that the area of a parallelogram is \(A = bh\), where \(b\) is the length of the base and \(h\) is the height of the parallelogram, as illustrated in Figure 10.40(a). As shown when defining the Parallelogram Law of vector addition, two vectors \(\vec u\) and \(\vec v\) define a parallelogram when drawn from the same initial point, as illustrated in Figure 10.40(b). Trigonometry tells us that \(h = \norm u \sin \theta\), hence the area of the parallelogram is
\[A = \norm u\,\norm v\sin\theta = \norm{\vec u \times \vec v},\label{eq:crossp1}\]
where the second equality comes from Theorem 88.
We illustrate using Equation \eqref{eq:crossp1} in the following example.
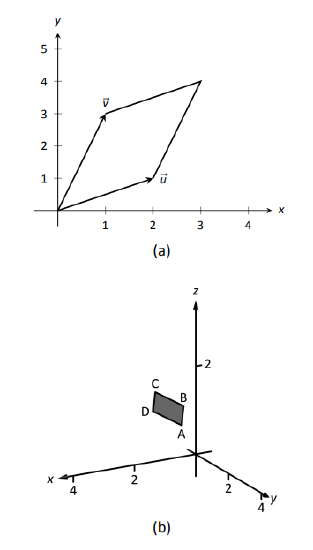
Example \(\PageIndex{4}\): Finding the area of a parallelogram
- Find the area of the parallelogram defined by the vectors \(\vec u = \langle 2,1\rangle\) and \(\vec v = \langle 1,3\rangle\).
- Verify that the points \(A = (1,1,1)\), \(B = (2,3,2)\), \(C = (4,5,3)\) and \(D = (3,3,2)\) are the vertices of a parallelogram. Find the area of the parallelogram.
Solution
- Figure 10.41(a) sketches the parallelogram defined by the vectors \(\vec u\) and \(\vec v\). We have a slight problem in that our vectors exist in \(\mathbb{R}^2\), not \(\mathbb{R}^3\), and the cross product is only defined on vectors in \(\mathbb{R}^3\). We skirt this issue by viewing \(\vec u\) and \(\vec v\) as vectors in the \(x-y\) plane of \(\mathbb{R}^3\), and rewrite them as \(\vec u = \langle 2,1,0\rangle\) and \(\vec v =\langle 1,3,0\rangle\). We can now compute the cross product. It is easy to show that \(\vec u \times \vec v = \langle 0,0,5\rangle\); therefore the area of the parallelogram is \(A = \norm{\vec u \times \vec v} = 5\).
- To show that the quadrilateral \(ABCD\) is a parallelogram (shown in Figure 10.41(b)), we need to show that the opposite sides are parallel. We can quickly show that \(\vec{AB} =\vec{DC} = \langle 1,2,1\rangle\) and \(\vec{BC} = \vec{AD} = \langle 2,2,1\rangle\). We find the area by computing the magnitude of the cross product of \(\vec{AB}\) and \(\vec{BC}\):
\[\vec{AB} \times \vec{BC} = \langle 0,1,-2\rangle \quad \Rightarrow \quad \norm{\vec{AB}\times\vec{BC}} = \sqrt{5} \approx 2.236.\]
This application is perhaps more useful in finding the area of a triangle (in short, triangles are used more often than parallelograms). We illustrate this in the following example.
Example \(\PageIndex{5}\): Area of a triangle
Find the area of the triangle with vertices \(A=(1,2)\), \(B=(2,3)\) and \(C=(3,1)\), as pictured in Figure 10.42.
Solution
We found the area of this triangle in a previous example to be \(1.5\) using integration. There we discussed the fact that finding the area of a triangle can be inconvenient using the "\(\frac12bh\)'' formula as one has to compute the height, which generally involves finding angles, etc. Using a cross product is much more direct.
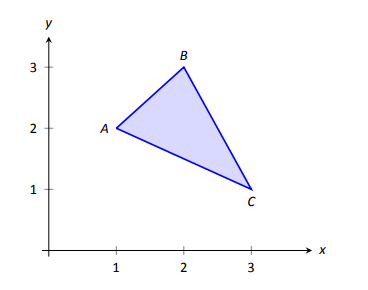
We can choose any two sides of the triangle to use to form vectors; we choose \(\vec{AB} = \langle 1,1\rangle\) and \(\vec{AC}=\langle 2,-1\rangle\). As in the previous example, we will rewrite these vectors with a third component of 0 so that we can apply the cross product. The area of the triangle is
\[\frac12\norm{\vec{AB}\times\vec{AC}} = \frac12\norm{\langle 1,1,0\rangle \times \langle 2,-1,0\rangle} = \frac12\norm{\langle 0,0,-3\rangle} = \frac32.\]
We arrive at the same answer as before with less work.
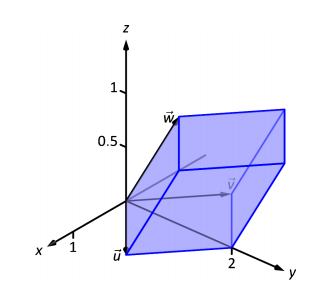
Volume of a Parallelepiped
The three dimensional analogue to the parallelogram is the parallelepiped. Each face is parallel to the face opposite face, as illustrated in Figure 10.43. By crossing \(\vec v\) and \(\vec w\), one gets a vector whose magnitude is the area of the base. Dotting this vector with \(\vec u\) computes the volume of parallelepiped! (Up to a sign; take the absolute value.)
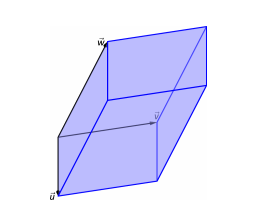
Thus the volume of a parallelepiped defined by vectors \(\vec u\), \(\vec v\) and \(\vec w\) is \[V = |\vec u\cdot (\vec v \times \vec w)|.\label{eq:crossp2}\]
Note how this is the Triple Scalar Product, first seen in Theorem 87. Applying the identities given in the theorem shows that we can apply the Triple Scalar Product in any "order'' we choose to find the volume. That is,
\[V = |\vec u\cdot(\vec v \times \vec w)| = |\vec u\cdot (\vec w \times \vec v)| = |(\vec u \times \vec v)\cdot \vec w|,\quad \text{etc.}\]
Example \(\PageIndex{6}\): Finding the volume of parallelepiped
Find the volume of the parallepiped defined by the vectors \(\vec u = \langle 1,1,0\rangle\), \(\vec v = \langle -1,1,0\rangle\) and \(\vec w = \langle 0,1,1\rangle\).
Solution
We apply Equation \eqref{eq:crossp2}. We first find \(\vec v \times \vec w =\langle 1,1,-1\rangle\). Then
\[|\vec u\cdot(\vec v \times \vec w)| = |\langle 1,1,0\rangle \cdot \langle1,1,-1\rangle| = 2.\]
So the volume of the parallelepiped is 2 cubic units.
While this application of the Triple Scalar Product is interesting, it is not used all that often: parallelepipeds are not a common shape in physics and engineering. The last application of the cross product is very applicable in engineering.
Torque
Torque is a measure of the turning force applied to an object. A classic scenario involving torque is the application of a wrench to a bolt. When a force is applied to the wrench, the bolt turns. When we represent the force and wrench with vectors \(\vec F\) and \(\vec \ell\), we see that the bolt moves (because of the threads) in a direction orthogonal to \(\vec F\) and \(\vec \ell\). Torque is usually represented by the Greek letter \(\tau\), or tau, and has units of N\(\cdot\)m, a Newton--meter, or ft\(\cdot\)lb, a foot--pound.
While a full understanding of torque is beyond the purposes of this book, when a force \(\vec F\) is applied to a lever arm \(\vec \ell\), the resulting torque is
\[\vec \tau = \vec \ell \times \vec F.\label{eq:crossp3}\]
Example \(\PageIndex{7}\): Computing torque
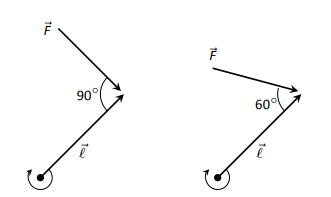
A lever of length 2ft makes an angle with the horizontal of \(45^\circ\). Find the resulting torque when a force of 10lb is applied to the end of the level where:
- the force is perpendicular to the lever, and
- the force makes an angle of \(60^\circ\) with the lever, as shown in Figure 10.45.
Solution
- We start by determining vectors for the force and lever arm. Since the lever arm makes a \(45^\circ\) angle with the horizontal and is 2ft long, we can state that \(\vec \ell = 2\langle \cos 45^\circ,\sin 45^\circ\rangle = \langle \sqrt2,\sqrt2\rangle.\)
Since the force vector is perpendicular to the lever arm (as seen in the left hand side of Figure 10.45), we can conclude it is making an angle of \(-45^\circ\) with the horizontal. As it has a magnitude of 10lb, we can state \(\vec F = 10\langle \cos (-45^\circ), \sin(-45^\circ)\rangle = \langle 5\sqrt2,-5\sqrt2\rangle.\)
Using Equation 10.45 to find the torque requires a cross product. We again let the third component of each vector be 0 and compute the cross product:
\[\begin{align*}\vec\tau &= \vec \ell \times \vec F \\&= \langle \sqrt2,\sqrt2,0\rangle \times \langle 5\sqrt2,-5\sqrt2,0\rangle \\&= \langle 0,0,-20\rangle\end{align*}\]
This clearly has a magnitude of 20 ft-lb.
We can view the force and lever arm vectors as lying "on the page''; our computation of \(\vec\tau\) shows that the torque goes "into the page.'' This follows the Right Hand Rule of the cross product, and it also matches well with the example of the wrench turning the bolt. Turning a bolt clockwise moves it in.
- Our lever arm can still be represented by \(\vec \ell = \langle \sqrt2,\sqrt2\rangle\). As our force vector makes a \(60^\circ\) angle with \(\vec \ell\), we can see (referencing the right hand side of the figure) that \(\vec F\) makes a \(-15^\circ\) angle with the horizontal. Thus
\[\begin{align*}\vec F = 10\langle \cos-15^\circ,\sin-15^\circ\rangle &= \langle \frac{5(1+\sqrt3)}{\sqrt2},-\frac{5(1+\sqrt3)}{\sqrt2}\rangle \\&\approx \langle 9.659,-2.588\rangle.\end{align*}\]
We again make the third component 0 and take the cross product to find the torque:
\[\begin{align*}\vec\tau &= \vec \ell \times \vec F\\&= \langle \sqrt2,\sqrt2,0\rangle \times \langle \frac{5(1+\sqrt3)}{\sqrt2},-\frac{5(1+\sqrt3)}{\sqrt2},0\rangle\\&= \langle 0,0,-10\sqrt3\rangle\\&\approx \langle 0,0,-17.321\rangle.\end{align*}\]
As one might expect, when the force and lever arm vectors are orthogonal, the magnitude of force is greater than when the vectors are not orthogonal.
While the cross product has a variety of applications (as noted in this chapter), its fundamental use is finding a vector perpendicular to two others. Knowing a vector is orthogonal to two others is of incredible importance, as it allows us to find the equations of lines and planes in a variety of contexts. The importance of the cross product, in some sense, relies on the importance of lines and planes, which see widespread use throughout engineering, physics and mathematics. We study lines and planes in the next two sections.