
13.3: Arc length and Curvature
- Page ID
- 963

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Sometimes it is useful to compute the length of a curve in space; for example, if the curve represents the path of a moving object, the length of the curve between two points may be the distance traveled by the object between two times.
Recall that if the curve is given by the vector function \(\bf r\) then the vector \(\Delta {\bf r}={\bf r}(t+\Delta t)-{\bf r}(t)\) points from one position on the curve to another, as depicted in figure . If the points are close together, the length of \(\Delta {\bf r}\) is close to the length of the curve between the two points. If we add up the lengths of many such tiny vectors, placed head to tail along a segment of the curve, we get an approximation to the length of the curve over that segment. In the limit, as usual, this sum turns into an integral that computes precisely the length of the curve.
First, note that
\[|\Delta {\bf r}|={|\Delta {\bf r}|\over \Delta t}\,\Delta t\approx |{\bf r}'(t)|\,\Delta t, \nonumber \]
when \(\Delta t\) is small. Then the length of the curve between \({\bf r}(a)\) and \({\bf r}(b)\) is
\[\lim_{n\to\infty} \sum_{i=0}^{n-1}|\Delta {\bf r}|
=\lim_{n\to\infty} \sum_{i=0}^{n-1} {|\Delta {\bf r}|\over \Delta t}\,\Delta t
=\lim_{n\to\infty} \sum_{i=0}^{n-1} |{\bf r}'(t)|\,\Delta t=
\int_a^b|{\bf r}'(t)|\,dt. \nonumber \]
(Well, sometimes. This works if between \(a\) and \(b\) the segment of curve is traced out exactly once.)
Let's find the length of one turn of the helix \({\bf r}=\langle \cos t, \sin t, t\rangle\) (see figure 13.1.1). We compute \({\bf r}'=\langle -\sin t, \cos t, 1\rangle\) and \(|{\bf r}'|=\sqrt{\sin^2 t+\cos^2 t+1}=\sqrt2\), so the length is
\[\int_0^{2\pi} \sqrt2\,dt = 2\sqrt2\pi. \nonumber \]
Suppose \(y=\ln x\); what is the length of this curve between \(x=1\) and \(x=\sqrt3\)?
Although this problem does not appear to involve vectors or three dimensions, we can interpret it in those terms: let \({\bf r}(t)=\langle t,\ln t,0\rangle\). This vector function traces out precisely \(y=\ln x\) in the \(x\)-\(y\) plane. Then \({\bf r}'(t)=\langle 1,1/t,0\rangle\) and \(|{\bf r}'(t)|=\sqrt{1+1/t^2}\) and the desired length is
\[\int_1^{\sqrt3} \sqrt{1+{1\over t^2}}\,dt=2-\sqrt2+\ln(\sqrt2+1)-{1\over2}\ln3. \nonumber \]
(This integral is a bit tricky, but requires only methods we have learned.)
Notice that there is nothing special about \(y=\ln x\), except that the resulting integral can be computed. In general, given any \(y=f(x)\), we can think of this as the vector function \({\bf r}(t)=\langle t,f(t),0\rangle\). Then \({\bf r}'(t)=\langle 1,f'(t),0\rangle\) and \(|{\bf r}'(t)|=\sqrt{1+(f')^2}\). The length of the curve \(y=f(x)\) between \(a\) and \(b\) is thus \[\int_a^b \sqrt{1+(f'(x))^2}\,dx. \nonumber \] Unfortunately, such integrals are often impossible to do exactly and must be approximated.
One useful application of arc length is the arc length parameterization. A vector function \({\bf r}(t)\) gives the position of a point in terms of the parameter \(t\), which is often time, but need not be. Suppose \(s\) is the distance along the curve from some fixed starting point; if we use \(s\) for the variable, we get \({\bf r}(s)\), the position in space in terms of distance along the curve. We might still imagine that the curve represents the position of a moving object; now we get the
position of the object as a function of how far the object has traveled.
Suppose \({\bf r}(t)=\langle \cos t,\sin t,0\rangle\). We know that this curve is a circle of radius 1. While \(t\) might represent time, it can also in this case represent the usual angle between the positive \(x\)-axis and \({\bf r}(t)\). The distance along the circle from \((1,0,0)\) to \((\cos t,\sin t,0)\) is also \(t\)---this is the definition of radian measure. Thus, in this case \(s=t\) and \({\bf r}(s)=\langle \cos s,\sin s,0\rangle\).
Suppose \({\bf r}(t)=\langle \cos t,\sin t,t\rangle\). We know that this curve is a helix. The distance along the helix from \((1,0,0)\) to \((\cos t,\sin t,t)\) is \[s=\int_0^t |{\bf r}'(u)|\,du=\int_0^t \sqrt{\cos^2u+\sin^2u+1}\,du= \int_0^t \sqrt{2}\,du=\sqrt2t. \nonumber \] Thus, the value of \(t\) that gets us distance \(s\) along the helix is \(t=s/\sqrt2\), and so the same curve is given by \(\hat{\bf r}(s)= \langle \cos(s/\sqrt2),\sin(s/\sqrt2),s/\sqrt2\rangle\).
In general, if we have a vector function \({\bf r}(t)\), to convert it to a vector function in terms of arc length we compute \[s=\int_a^t |{\bf r}'(u)|\,du=f(t), \nonumber \] solve \(s=f(t)\) for \(t\), getting \(t=g(s)\), and substitute this back into \({\bf r}(t)\) to get \(\hat{\bf r}(s)={\bf r}(g(s))\).
Suppose that \(t\) is time. By the Fundamental Theorem of Calculus, if we start with arc length \[s(t)=\int_a^t |{\bf r}'(u)|\,du \nonumber \]
and take the derivative, we get
\[s'(t)=|{\bf r}'(t)|. \nonumber \]
Here \(s'(t)\) is the rate at which the arc length is changing, and we have seen that \(|{\bf r}'(t)|\) is the speed of a moving object; these are of course the same.
Suppose that \({\bf r}(s)\) is given in terms of arc length; what is \(|{\bf r}'(s)|\)? It is the rate at which arc length is changing relative to arc length; it must be 1! In the case of the helix, for example, the arc length parameterization is \(\langle \cos(s/\sqrt2),\sin(s/\sqrt2),s/\sqrt2\rangle\), the derivative is \(\langle -\sin(s/\sqrt2)/\sqrt2,\cos(s/\sqrt2)/\sqrt2,1/\sqrt2\rangle\), and the length of this is
\[\sqrt{\dfrac{\sin^2 (s/\sqrt{2})}{2} + \dfrac{\cos^2(s/\sqrt{2})}{2} + \dfrac{1}{2}}=\sqrt{\dfrac{1}{2}+\dfrac{1}{2}}=1. \nonumber \]
So in general, \({\bf r}'\) is a unit tangent vector.
Given a curve \({\bf r}(t)\), we would like to be able to measure, at various points, how sharply curved it is. Clearly this is related to how "fast'' a tangent vector is changing direction, so a first guess might be that we can measure curvature with \(|{\bf r}''(t)|\). A little thought shows that this is flawed; if we think of \(t\) as time, for example, we could be tracing out the curve more or less quickly as time passes. The second derivative \(|{\bf r}''(t)|\) incorporates this notion of time, so it depends not simply on the geometric properties of the curve but on how quickly we move along the curve.
Consider \({\bf r}(t)=\langle \cos t,\sin t,0\rangle\) and \({\bf s}(t)=\langle \cos 2t,\sin 2t,0\rangle\). Both of these vector functions represent the unit circle in the \(x\)-\(y\) plane, but if \(t\) is interpreted as time, the second describes an object moving twice as fast as the first. Computing the second derivatives, we find \(|{\bf r}''(t)|=1\), \(|{\bf s}''(t)|=4\).
To remove the dependence on time, we use the arc length parameterization. If a curve is given by \({\bf r}(s)\), then the first derivative \({\bf r}'(s)\) is a unit vector, that is, \({\bf r}'(s)={\bf T}(s)\). We now compute the second derivative \({\bf r}''(s)={\bf T}'(s)\) and use \(|{\bf T}'(s)|\) as the "official'' measure of {\dfont curvature}\index{curvature}, usually denoted \(\kappa\).
We have seen that the arc length parameterization of aparticular helix is \({\bf r}(s)=\langle \cos(s/\sqrt2),\sin(s/\sqrt2),s/\sqrt2\rangle\). Computing the second derivative gives \({\bf r}''(s)= \langle -\cos(s/\sqrt2)/2,-\sin(s/\sqrt2)/2,0\rangle\) with length \(1/2\).
What if we are given a curve as a vector function \({\bf r}(t)\), where \(t\) is not arc length? We have seen that arc length can be difficult to compute; fortunately, we do not need to convert to the arc length parameterization to compute curvature. Instead, let us imagine that we have done this, so we have found \(t=g(s)\) and then formed \(\hat{\bf r}(s)={\bf r}(g(s))\). The first derivative \(\hat{\bf r}'(s)\) is a unit tangent vector, so it is the same as the unit tangent vector \({\bf T}(t)={\bf T}(g(s))\). Taking the derivative of this we get
\[{d\over ds}{\bf T}(g(s))= {\bf T}'(g(s)) g'(s)={\bf T}'(t){dt\over ds}. \nonumber \]
The curvature\index{curvature formula} is the length of this vector: \[\kappa = |{\bf T}'(t)||{dt\over ds}|={|{\bf T}'(t)|\over|ds/dt|}= {|{\bf T}'(t)|\over|{\bf r}'(t)|}. \nonumber \]
(Recall that we have seen that \(ds/dt=|{\bf r}'(t)|\).) Thus we can compute the curvature by computing only derivatives with respect to \(t\); we do not need to do the conversion to arc length.
Returning to the helix, suppose we start with the parameterization \({\bf r}(t)=\langle \cos t,\sin t,t\rangle\). Then \({\bf r}'(t)=\langle -\sin t,\cos t,1\rangle\), \(|{\bf r}'(t)|=\sqrt2\), and \({\bf T}(t)=\langle -\sin t,\cos t,1\rangle/\sqrt2\). Then \({\bf T}'(t)=\langle -\cos t,-\sin t,0\rangle/\sqrt2\) and \(|{\bf T}'(t)|=1/\sqrt2\). Finally, \(\kappa=1/\sqrt2/\sqrt2=1/2\), as before.
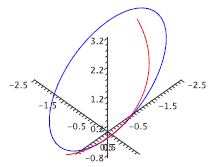
Consider this circle of radius \(a\): \({\bf r}(t)=\langle a\cos t,a\sin t,1\rangle\). Then \({\bf r}'(t)=\langle -a\sin t,a\cos t,0\rangle\), \(|{\bf r}'(t)|=a\), and \({\bf T}(t)=\langle -a\sin t,a\cos t,0\rangle/a\). Now \({\bf T}'(t)=\langle -a\cos t,-a\sin t,0\rangle/a\) and \(|{\bf T}'(t)|=1\). Finally, \(\kappa=1/a\): the curvature of a circle is everywhere the inverse of the radius. It is sometimes useful to think of curvature as describing what circle a curve most resembles at a point. The curvature of the helix in the previous example is \(1/2\); this means that a small piece of the helix looks very much like a circle of radius \(2\), as shown in figure.
Consider \({\bf r}(t)=\langle \cos t,\sin t,\cos 2t\rangle\), as shown in figure 13.2.4. \({\bf r}'(t)= \langle -\sin t,\cos t,-2\sin (2t)\rangle\) and \(|{\bf r}'(t)|= \sqrt{1+4\sin^2(2t)}\), so
\nonumber \]{\bf T}(t)=\left\langle {-\sin t\over \sqrt{1+4\sin^2(2t)}}, {\cos t\over \sqrt{1+4\sin^2(2t)}},
{-2\sin 2t\over \sqrt{1+4\sin^2(2t)}}\right\rangle.\[ Computing the derivative of this and then the length of the resulting vector is possible but unpleasant.
Fortunately, there is an alternate formula for the curvature\index{curvature formula} that is often simpler than the one we have:
\nonumber \]\kappa = {|{\bf r}'(t)\times{\bf r}''(t)|\over|{\bf r}'(t)|^3}. \nonumber \]
Returning to the previous example, we compute the second derivative \({\bf r}''(t)= \langle -\cos t,-\sin t,-4\cos(2t)\rangle\). Then the cross product \({\bf r}'(t)\times{\bf r}''(t)\) is
\[\langle -4\cos t\cos 2t-2\sin t\sin 2t, 2\cos t\sin 2t-4\sin t \cos2t,1\rangle. \nonumber \]
Computing the length of this vector and dividing by \(|{\bf r}'(t)|^3\) is still a bit tedious. With the aid of a computer we get
\[\kappa = {\sqrt{48\cos^4 t - 48\cos^2 t + 17}\over (-16\cos^4 t +16\cos^2t+1)^{3/2}}. \nonumber \]
Graphing this we get
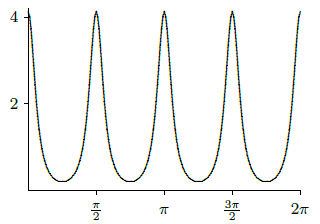
Compare this to figure 13.2.4. The highest curvature occurs where the curve has its highest and lowest points, and indeed in the picture these appear to be the most sharply curved portions of the curve, while the curve is almost a straight line midway between those points.
Let's see why this alternate formula is correct. Starting with the definition of \({\bf T}\), \({\bf r}'=|{\bf r}'|{\bf T}\) so by the product rule \({\bf r}''=|{\bf r}'|'{\bf T}+|{\bf r}'|{\bf T}'\). Then by Theorem~\xrefn{thm:cross product properties} the cross product is
\[\eqalign{
{\bf r}'\times{\bf r}''&=|{\bf r}'|{\bf T}\times|{\bf r}'|'{\bf T}+
|{\bf r}'|{\bf T}\times|{\bf r}'|{\bf T}'\cr
&=|{\bf r}'||{\bf r}'|'({\bf T}\times{\bf T})+|{\bf r}'|^2
({\bf T}\times{\bf T}')\cr
&=|{\bf r}'|^2({\bf T}\times{\bf T}')\cr
} \nonumber \]
because \({\bf T}\times{\bf T}={\bf 0}\), since \({\bf T}\) is parallel to itself. Then
\[\eqalign{ |{\bf r}'\times{\bf r}''|&=|{\bf r}'|^2|{\bf T}\times{\bf T}'|\cr &=|{\bf r}'|^2|{\bf T}||{\bf T}'|\sin\theta\cr &=|{\bf r}'|^2|{\bf T}'|\cr } \nonumber \]
using exercise 8 in section 13.2 to see that \(\theta=\pi/2\). Dividing both sides by \(|{\bf r}'|^3\) then gives the desired formula.
We used the fact here that \({\bf T}'\) is perpendicular to \({\bf T}\); the vector \({\bf N}={\bf T}'/|{\bf T}'|\) is thus a unit vector perpendicular to \({\bf T}\), called the {\dfont unit normal\/}\index{unit normal}\index{normal} to the curve. Occasionally of use is the {\dfont unit binormal\/}\index{unit binormal}\index{binormal} \({\bf B}={\bf T}\times{\bf N}\), a unit vector perpendicular to both \({\bf T}\) and \({\bf N}\).
Contributors
Integrated by Justin Marshall.