
4.6: Gradient, Divergence, Curl, and Laplacian

- Last updated
- Jan 16, 2023
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
In this final section we will establish some relationships between the gradient, divergence and curl, and we will also introduce a new quantity called the Laplacian. We will then show how to write these quantities in cylindrical and spherical coordinates.
Gradient
For a real-valued function
in
It turns out that the divergence and curl can also be expressed in terms of the symbol
Here, the symbols
Is
For this reason,
Divergence
For example, it is often convenient to write the divergence div f as
We can also write curl f in terms of
For a real-valued function
Note that this is a real-valued function, to which we will give a special name:
Definition 4.7: Laplacian
For a real-valued function
Often the notation
Example 4.17
Let
- the gradient of
- the divergence of
- the curl of
- the Laplacian of
Solution:
(a)
(b)
(c)
(d)
Note that we could have calculated
Notice that in Example 4.17 if we take the curl of the gradient of
The following theorem shows that this will be the case in general:
Theorem 4.15.
For any smooth real-valued function
Proof
We see by the smoothness of f that
since the mixed partial derivatives in each component are equal.
Corollary 4.16
If a vector field
Another way of stating Theorem 4.15 is that gradients are irrotational. Also, notice that in Example 4.17 if we take the divergence of the curl of r we trivially get
The following theorem shows that this will be the case in general:
Theorem 4.17.
For any smooth vector field
The proof is straightforward and left as an exercise for the reader.
Corollary 4.18
The flux of the curl of a smooth vector field
Proof: Let
There is another method for proving Theorem 4.15 which can be useful, and is often used in physics. Namely, if the surface integral
For instance, to prove Theorem 4.15, assume that
Since the choice of
Example 4.18
A system of electric charges has a charge density
for any closed surface
Solution
By the Divergence Theorem, we have
Often (especially in physics) it is convenient to use other coordinate systems when dealing with quantities such as the gradient, divergence, curl and Laplacian. We will present the formulas for these in cylindrical and spherical coordinates.
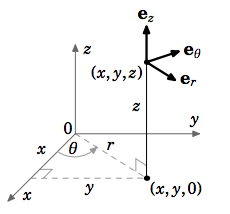
Recall from Section 1.7 that a point
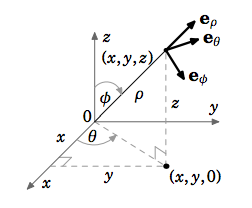
Similarly, a point
We can now summarize the expressions for the gradient, divergence, curl and Laplacian in Cartesian, cylindrical and spherical coordinates in the following tables:
Cartesian
- gradient :
- divergence :
- curl :
- Laplacian :
Cylindrical
- gradient :
- divergence :
- curl :
- Laplacian :
Spherical
- gradient :
- divergence :
- curl :
- Laplacian :
The derivation of the above formulas for cylindrical and spherical coordinates is straightforward but extremely tedious. The basic idea is to take the Cartesian equivalent of the quantity in question and to substitute into that formula using the appropriate coordinate transformation. As an example, we will derive the formula for the gradient in spherical coordinates.
Goal: Show that the gradient of a real-valued function
Idea: In the Cartesian gradient formula
Step 1: Get formulas for
We can see from Figure 4.6.2 that the unit vector
so using
Now, since the angle
Lastly, since
Step 2: Use the three formulas from Step 1 to solve for i, j, k in terms of
This comes down to solving a system of three equations in three unknowns. There are many ways of doing this, but we will do it by combining the formulas for
First, note that
so that
and so:
Likewise, we see that
and so:
Lastly, we see that:
Step 3: Get formulas for
By the Chain Rule, we have
which yields:
Step 4: Use the three formulas from Step 3 to solve for
Again, this involves solving a system of three equations in three unknowns. Using a similar process of elimination as in Step 2, we get:
Step 5: Substitute the formulas for i, j, k from Step 2 and the formulas for
Doing this last step is perhaps the most tedious, since it involves simplifying
which we see has 8 terms involving
Example 4.19
In Example 4.17 we showed that
Solution
Since