
2.4: Straight angle
- Page ID
- 23587

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
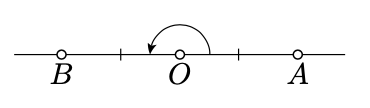
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)If \(\measuredangle AOB = \pi\), we say that \(\angle AOB\) is a straight angle. Note that by Proposition 2.3.2, if \(\angle AOB\) is a straight, then so is \(\angle BOA\).
We says that the point \(O\) lies between points \(A\) and \(B\), if \(O \ne A\), \(O \ne B\), and \(O \in [AB]\).
The angle \(AOB\) is straight if and only if \(O\) lies between \(A\) and \(B\).
- Proof
-
By Proposition 2.2.2, we may assume that \(OA = OB = 1\).
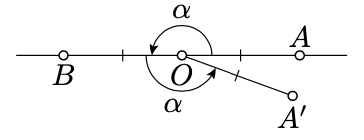
"If" part. Assume \(O\) lies between \(A\) and \(B\). Set \(\alpha = \measuredangle AOB\).
Applying Axiom IIIa, we get a half-line \([OA')\) such that \(\alpha = \measuredangle BOA'\). By Proposition 2.2.2, we can assume that \(OA' = 1\). According to Axiom IV,
\(\triangle AOB \cong \triangle BOA'\).
Suppose that \(f\) denotes the corresponding motion of the plane; that is, \(f\) is a motion such that \(f(A) = B\), \(f(O) = O\), and \(f(B) = A'\).
Then
\(O = f(O) \in f(AB) = (A'B)\).
Therefore, both lines \((AB)\) and \((A'B)\) contain \(B\) and \(O\). By Axiom II, \((AB) = (A'B)\).
By the definition of the line, \((AB)\) contains exactly two points \(A\) and \(B\) on distance 1 from \(O\). Since \(OA' = 1\) and \(A' \ne B\), we get that \(A = A'\).
By Axiom IIIb and Proposition 2.3.1, we get that
\[\begin{array} {rcl} {2 \cdot \alpha} & = & {\measuredangle AOB + \measuredangle BOA' =} \\ {} & = & {\measuredangle AOB + \measuredangle BOA \equiv} \\ {} & equiv & {\measuredangle AOA =} \\ {} & = & {0} \end{array}\]
Therefore, by Exercise 1.8.1, \(\alpha\) is either 0 or \(\pi\).
Since \([OA) \ne [OB)\), we have that \(\alpha \ne 0\), see Exercise 2.3.1. Therefore, \(\alpha = \pi\).
"Only if" part. Suppose that \(\measuredangle AOB = \pi\). Consider the line \((OA)\) and choose a point \(B'\) on \((OA)\) so that \(O\) lies between \(A\) and \(B'\).
From above, we have that \(\measuredangle AOB' = \pi\). Applying Axiom IIIa, we get that \([OB) = [OB')\). In particular, \(O\) lies between \(A\) and \(B\).
A triangle \(ABC\) is called degenerate if \(A, B\), and \(C\) lie on one line. The following corollary is just a reformulation of Theorem 2.4.1.
A triangle is degenerate if and only if one of its angles is equal to \(\pi\) or 0. Moreover in a degenerate triangle the angle measures are 0, 0, and \(\pi\).
Exercise \(\PageIndex{1}\)
Show that three distinct points \(A, O\), and \(B\) lie on one line if and only if
\(2 \cdot \measuredangle AOB \equiv 0\).
- Hint
-
Apply Proposition 2.3.1, Theorem 2.4.1 and Exercise 1.8.1.
Exercise \(\PageIndex{2}\)
Let \(A, B\) and \(C\) be three points distinct from \(O\). Show that \(B, O\) and \(C\) lie on one line if and only if
\(2 \cdot \measuredangle AOB \equiv 2 \cdot \measuredangle AOC\).
- Hint
-
Axiom IIIb, \(2 \cdot \measuredangle BOC \equiv 2 \cdot \measuredangle AOC - 2 \cdot \measuredangle AOB = 0\). By Exercise 1.8.1, it implies that \(\measuredangle BOC\) is either 0 or \(\pi\). It remains to apply Exercsie 2.3.1 and Theorem 2.4.1 respectively in these two cases.
Exercise \(\PageIndex{3}\)
Show that there is a nondegenerate triangle.
- Answer
-
Fix two points \(A\) and \(B\) provided by Axiom I.
Fix a real number \(0 < \alpha < \pi\). By Axiom IIIa there is a point \(C\) such that \(\measuredangle ABC = \alpha\). Use Proposition 2.2.1 to show that \(\triangle ABC\) is nondegenerate.