
8.8: Vectors
- Page ID
- 1382

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- View vectors geometrically.
- Find magnitude and direction.
- Perform vector addition and scalar multiplication.
- Find the component form of a vector.
- Find the unit vector in the direction of \(v\).
- Perform operations with vectors in terms of \(i\) and \(j\).
- Find the dot product of two vectors.
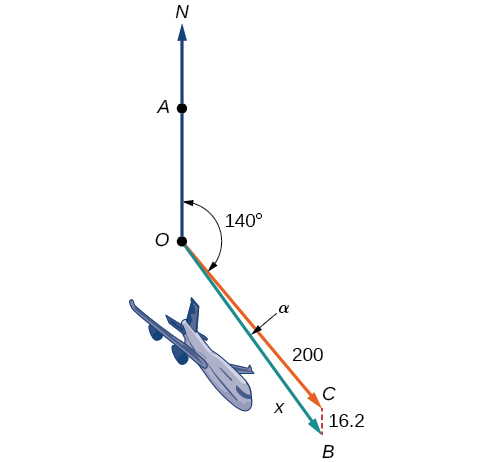
An airplane is flying at an airspeed of \(200\) miles per hour headed on a SE bearing of \(140°\). A north wind (from north to south) is blowing at \(16.2\) miles per hour, as shown in Figure \(\PageIndex{1}\). What are the ground speed and actual bearing of the plane?
Ground speed refers to the speed of a plane relative to the ground. Airspeed refers to the speed a plane can travel relative to its surrounding air mass. These two quantities are not the same because of the effect of wind. In an earlier section, we used triangles to solve a similar problem involving the movement of boats. Later in this section, we will find the airplane’s ground speed and bearing, while investigating another approach to problems of this type. First, however, let’s examine the basics of vectors.
A Geometric View of Vectors
A vector is a specific quantity drawn as a line segment with an arrowhead at one end. It has an initial point, where it begins, and a terminal point, where it ends. A vector is defined by its magnitude, or the length of the line, and its direction, indicated by an arrowhead at the terminal point. Thus, a vector is a directed line segment. There are various symbols that distinguish vectors from other quantities:
- Lower case, boldfaced type, with or without an arrow on top such as \(u\), \(w\), \(\overrightarrow{v}\), \(\overrightarrow{u}\), \(\overrightarrow{w}\).
- Given initial point \(P\) and terminal point \(Q\), a vector can be represented as \(\overrightarrow{PQ}\). The arrowhead on top is what indicates that it is not just a line, but a directed line segment.
- Given an initial point of \((0,0)\) and terminal point \((a,b)\), a vector may be represented as \(⟨a,b⟩\).
This last symbol \(⟨a,b⟩\) has special significance. It is called the standard position. The position vector has an initial point \((0,0)\) and a terminal point \(⟨a,b⟩\). To change any vector into the position vector, we think about the change in the x-coordinates and the change in the y-coordinates. Thus, if the initial point of a vector \(\overrightarrow{CD}\) is \(C(x_1,y_1)\) and the terminal point is \(D(x_2,y_2)\), then the position vector is found by calculating
\[\begin{align*} \overrightarrow{AB} &= ⟨x_2−x_1,y_2−y_1⟩ \\[4pt] &= ⟨a,b⟩ \end{align*}\]
In Figure \(\PageIndex{2}\), we see the original vector \(\overrightarrow{CD}\) and the position vector \(\overrightarrow{AB}\).
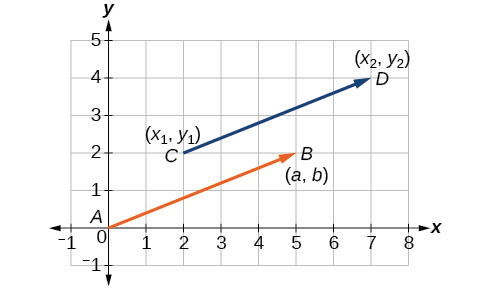
A vector is a directed line segment with an initial point and a terminal point. Vectors are identified by magnitude, or the length of the line, and direction, represented by the arrowhead pointing toward the terminal point. The position vector has an initial point at \((0,0)\) and is identified by its terminal point \(⟨a,b⟩\).
Consider the vector whose initial point is \(P(2,3)\) and terminal point is \(Q(6,4)\). Find the position vector.
Solution
The position vector is found by subtracting one \(x\)-coordinate from the other \(x\)-coordinate, and one \(y\)-coordinate from the other \(y\)-coordinate. Thus
\[\begin{align*} v &= ⟨6−2,4−3⟩ \\[4pt] &=⟨4,1⟩ \end{align*}\]
The position vector begins at \((0,0)\) and terminates at \((4,1)\). The graphs of both vectors are shown in Figure \(\PageIndex{3}\).
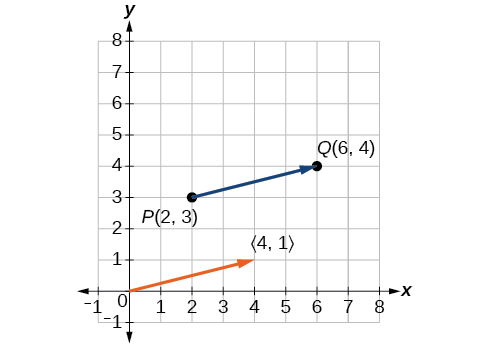
We see that the position vector is \(⟨4,1⟩\).
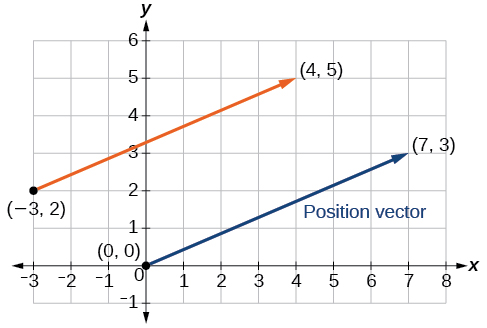
Find the position vector given that vector \(v\) has an initial point at \((−3,2)\) and a terminal point at \((4,5)\), then graph both vectors in the same plane.
Solution
The position vector is found using the following calculation:
\[\begin{align*} v &= ⟨4−(−3),5−2⟩ \\[4pt] &= ⟨7,3⟩ \end{align*}\]
Thus, the position vector begins at \((0,0)\) and terminates at \((7,3)\). See Figure \(\PageIndex{4}\).
Draw a vector \(\vec{v}\) that connects from the origin to the point \((3,5)\).
- Answer
-
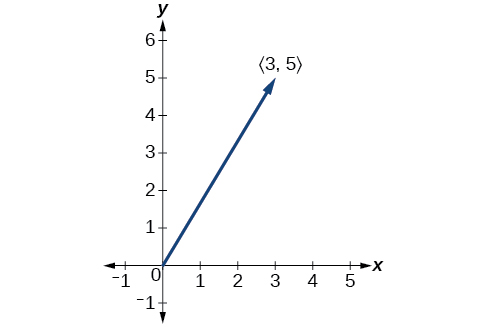
Figure \(\PageIndex{5}\)
Finding Magnitude and Direction
To work with a vector, we need to be able to find its magnitude and its direction. We find its magnitude using the Pythagorean Theorem or the distance formula, and we find its direction using the inverse tangent function.
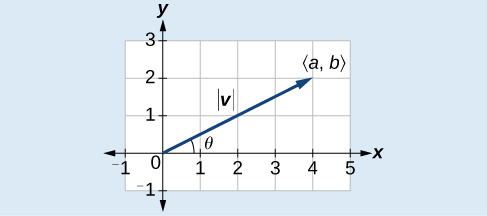
Given a position vector \(\vec{v}=⟨a,b⟩\),the magnitude is found by \(| v |=\sqrt{a^2+b^2}\).The direction is equal to the angle formed with the \(x\)-axis, or with the \(y\)-axis, depending on the application. For a position vector, the direction is found by \(\tan \theta=\left(\dfrac{b}{a}\right)⇒\theta={\tan}^{−1}\left(\dfrac{b}{a}\right)\), as illustrated in Figure \(\PageIndex{6}\).
Two vectors \(\vec{v}\) and \(\vec{u}\) are considered equal if they have the same magnitude and the same direction. Additionally, if both vectors have the same position vector, they are equal.
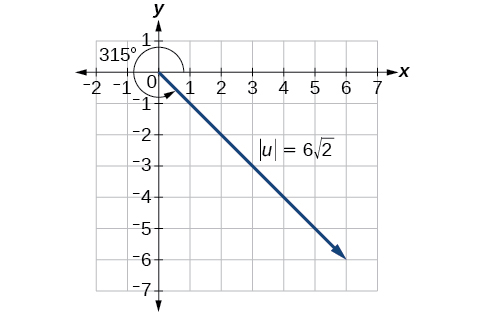
Find the magnitude and direction of the vector with initial point \(P(−8,1)\) and terminal point \(Q(−2,−5)\).Draw the vector.
Solution
First, find the position vector.
\[\begin{align*} u &= ⟨−2,−(−8),−5−1⟩ \\[4pt] &= ⟨6,−6⟩ \end{align*}\]
We use the Pythagorean Theorem to find the magnitude.
\[\begin{align*} |u| &= \sqrt{{(6)}^2+{(−6)}^2} \\[4pt] &= \sqrt{72} \\[4pt] &=\sqrt{62} \end{align*}\]
The direction is given as
\[\begin{align*} \tan \theta & =\dfrac{−6}{6}=−1\rightarrow \theta={\tan}^{−1}(−1) \\[4pt] &= −45° \end{align*}\]
However, the angle terminates in the fourth quadrant, so we add \(360°\) to obtain a positive angle. Thus, \(−45°+360°=315°\). See Figure \(\PageIndex{7}\).
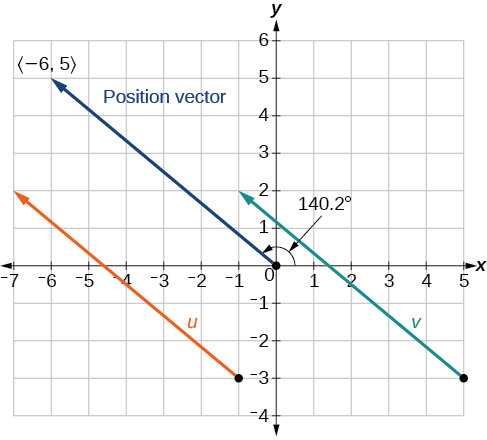
Show that vector \(\vec{v}\) with initial point at \((5,−3)\) and terminal point at \((−1,2)\) is equal to vector \(\vec{u}\) with initial point at \((−1,−3)\) and terminal point at \((−7,2)\). Draw the position vector on the same grid as \(\vec{v}\) and \(\vec{u}\). Next, find the magnitude and direction of each vector.
Solution
As shown in Figure \(\PageIndex{8}\), draw the vector \(\vec{v}\) starting at initial \((5,−3)\) and terminal point \((−1,2)\). Draw the vector \(\vec{u}\) with initial point \((−1,−3)\) and terminal point \((−7,2)\). Find the standard position for each.
Next, find and sketch the position vector for \(\vec{v}\) and \(\vec{u}\). We have
\[\begin{align*} v &= ⟨−1−5,2−(−3)⟩ \\[4pt] &= ⟨−6,5⟩u \\[4pt] &= ⟨−7−(−1),2−(−3)⟩ \\[4pt] & =⟨−6,5⟩ \end{align*}\]
Since the position vectors are the same, \(\vec{v}\) and \(\vec{u}\) are the same.
An alternative way to check for vector equality is to show that the magnitude and direction are the same for both vectors. To show that the magnitudes are equal, use the Pythagorean Theorem.
\[\begin{align*} |v| &= \sqrt{{(−1−5)}^2+{(2−(−3))}^2} \\[4pt] &= \sqrt{{(−6)}^2+{(5)}^2} \\[4pt] &= \sqrt{36+25} \\[4pt] &= \sqrt{61} \\[4pt] |u| &= \sqrt{{(−7−(−1))}^2+{(2−(−3))}^2} \\[4pt] &=\sqrt{{(−6)}^2+{(5)}^2} \\[4pt] &= \sqrt{36+25} \\[4pt] &= \sqrt{61} \end{align*}\]
As the magnitudes are equal, we now need to verify the direction. Using the tangent function with the position vector gives
\[\begin{align*} \tan \theta &= −\dfrac{5}{6}⇒\theta={\tan}^{−1}\left(−\dfrac{5}{6}\right) \\[4pt] & = −39.8° \end{align*}\]
However, we can see that the position vector terminates in the second quadrant, so we add \(180°\). Thus, the direction is \(−39.8°+180°=140.2°\).
Performing Vector Addition and Scalar Multiplication
Now that we understand the properties of vectors, we can perform operations involving them. While it is convenient to think of the vector \(u=⟨x,y⟩\) as an arrow or directed line segment from the origin to the point \((x,y)\), vectors can be situated anywhere in the plane. The sum of two vectors \(\vec{u}\) and \(\vec{v}\), or vector addition, produces a third vector \(\overrightarrow{u+ v}\), the resultant vector.
To find \(\overrightarrow{u + v}\), we first draw the vector \(\vec{u}\), and from the terminal end of \(\vec{u}\), we drawn the vector \(\vec{v}\). In other words, we have the initial point of \(\vec{v}\) meet the terminal end of \(\vec{u}\). This position corresponds to the notion that we move along the first vector and then, from its terminal point, we move along the second vector. The sum \(\overrightarrow{u + v}\) is the resultant vector because it results from addition or subtraction of two vectors. The resultant vector travels directly from the beginning of \(\vec{u}\) to the end of \(\vec{v}\) in a straight path, as shown in Figure \(\PageIndex{9}\).
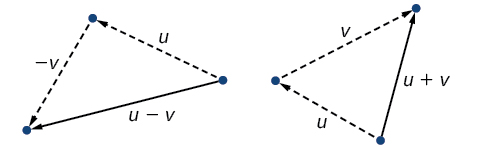
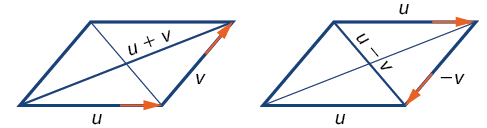
Vector subtraction is similar to vector addition. To find \(\overrightarrow{u − v}\), view it as \(\overrightarrow{u + (−v)}\). Adding \(\overrightarrow{−v}\) is reversing direction of \(\vec{v}\) and adding it to the end of \(\vec{u}\). The new vector begins at the start of \(\vec{u}\) and stops at the end point of \(\overrightarrow{−v}\). See Figure \(\PageIndex{10}\) for a visual that compares vector addition and vector subtraction using parallelograms.
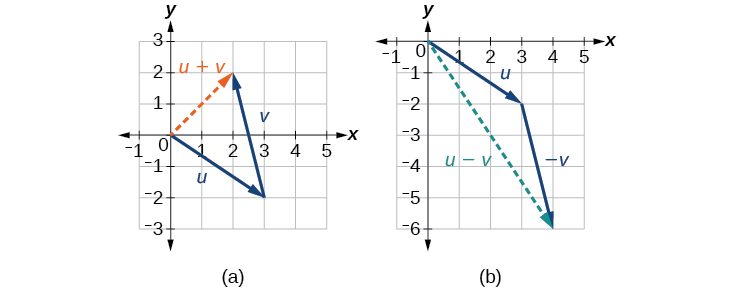
Given \(u=⟨3,−2⟩\) and \(v=⟨−1,4⟩\), find two new vectors \(\overrightarrow{u + v}\), and \(\overrightarrow{u − v}\).
Solution
To find the sum of two vectors, we add the components. Thus,
\[ \begin{align*} u+v &= ⟨3,−2⟩+⟨−1,4⟩ \\[4pt] &= ⟨3+(−1),−2+4⟩ \\[4pt] &=⟨2,2⟩ \end{align*}\]
See Figure \(\PageIndex{11a}\).
To find the difference of two vectors, add the negative components of \(\vec{v}\) to \(\vec{u}\). Thus,
\[\begin{align*}u+(−v) &=⟨3,−2⟩+⟨1,−4⟩ \\[4pt] &= ⟨3+1,−2+(−4)⟩ \\[4pt] &= ⟨4,−6⟩ \end{align*}\]
See Figure \(\PageIndex{11b}\).
Multiplying By a Scalar
While adding and subtracting vectors gives us a new vector with a different magnitude and direction, the process of multiplying a vector by a scalar, a constant, changes only the magnitude of the vector or the length of the line. Scalar multiplication has no effect on the direction unless the scalar is negative, in which case the direction of the resulting vector is opposite the direction of the original vector.
Scalar multiplication involves the product of a vector and a scalar. Each component of the vector is multiplied by the scalar. Thus, to multiply \(v=⟨a,b⟩\) by \(k\), we have
\(kv=⟨ka,kb⟩\)
Only the magnitude changes, unless \(k\) is negative, and then the vector reverses direction.
Given vector \(\vec{v}=⟨3,1⟩\), find \(3\vec{v}\), \(\dfrac{1}{2}\), and \(\vec{−v}\).
Solution
See Figure \(\PageIndex{12}\) for a geometric interpretation. If \(\vec{v}=⟨3,1⟩\), then
\[\begin{align*} 3v &= ⟨3⋅3,3⋅1⟩ \\[4pt] &= ⟨9,3⟩ \\[4pt] \dfrac{1}{2}v &= ⟨\dfrac{1}{2}⋅3,\dfrac{1}{2}⋅1⟩ \\[4pt] &=⟨\dfrac{3}{2},\dfrac{1}{2}⟩ \\[4pt] −v &=⟨−3,−1⟩ \end{align*}\]
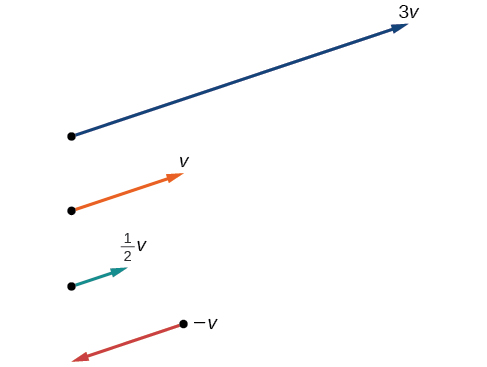
Analysis
Notice that the vector \(3\vec{v}\) is three times the length of \(\vec{v}\), \(\dfrac{1}{2}\vec{v}\) is half the length of \(\vec{v}\), and \(\overrightarrow{–v}\) is the same length of \(\vec{v}\), but in the opposite direction.
Find the scalar multiple \(3u\) given \(\vec{u}=⟨5,4⟩\).
- Answer
-
\(3u=⟨15,12⟩\)
Find a linear equation to solve for the following unknown quantities: One number exceeds another number by \(17\) and their sum is \(31\). Find the two numbers.
Solution
First, we must multiply each vector by the scalar.
\[\begin{align*} 3u &= 3⟨3,−2⟩ \\[4pt] &= ⟨9,−6⟩ \\[4pt] 2v &= 2⟨−1,4⟩ \\[4pt] &= ⟨−2,8⟩ \end{align*}\]
Then, add the two together.
\[\begin{align*} w &= 3u+2v \\[4pt] &=⟨9,−6⟩+⟨−2,8⟩ \\[4pt] &= ⟨9−2,−6+8⟩ \\[4pt] &= ⟨7,2⟩ \end{align*}\]
So, \(w=⟨7,2⟩\).
Finding Component Form
In some applications involving vectors, it is helpful for us to be able to break a vector down into its components. Vectors are comprised of two components: the horizontal component is the \(x\) direction, and the vertical component is the \(y\) direction. For example, we can see in the graph in Figure \(\PageIndex{13}\) that the position vector \(⟨2,3⟩\) comes from adding the vectors \(v_1\) and \(v_2\). We have \(v_2\) with initial point \((0,0)\) and terminal point \((2,0)\).
\[\begin{align*} v_1 &= ⟨2−0,0−0⟩ \\[4pt] &= ⟨2,0⟩ \end{align*}\]
We also have \(v_2\) with initial point \((0,0)\) and terminal point \((0, 3)\).
\[\begin{align*} v_2 &= ⟨0−0,3−0⟩ \\[4pt] &= ⟨0,3⟩ \end{align*}\]
Therefore, the position vector is
\[\begin{align*} v &= ⟨2+0,3+0⟩ \\[4pt] &= ⟨2,3⟩ \end{align*}\]
Using the Pythagorean Theorem, the magnitude of \(v_1\) is \(2\), and the magnitude of \(v_2\) is \(3\). To find the magnitude of \(v\), use the formula with the position vector.
\[\begin{align*} |v| &= \sqrt{{|v_1|}^2+{|v_2|}^2} \\[4pt] &= \sqrt{2^2+3^2} \\[4pt] &= \sqrt{13} \end{align*}\]
The magnitude of \(v\) is \(\sqrt{13}\). To find the direction, we use the tangent function \(\tan \theta=\dfrac{y}{x}\).
\[\begin{align*} \tan \theta &= \dfrac{v_2}{v_1} \\[4pt] \tan \theta &= \dfrac{3}{2} \\[4pt] \theta &={\tan}^{−1}\left(\dfrac{3}{2}\right)=56.3° \end{align*}\]
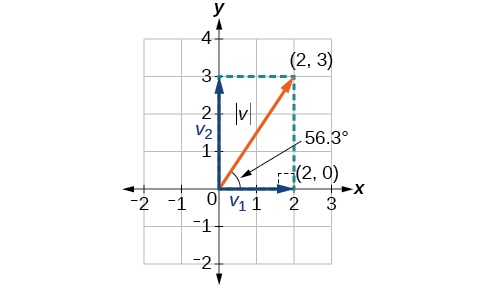
Thus, the magnitude of \(\vec{v}\) is \(\sqrt{13}\) and the direction is \(56.3^{\circ}\) off the horizontal.
Find the components of the vector \(\vec{v}\) with initial point \((3,2)\) and terminal point \((7,4)\).
Solution
First find the standard position.
\[\begin{align*} v &= ⟨7−3,4−2⟩ \\[4pt] &= ⟨4,2⟩ \end{align*}\]
See the illustration in Figure \(\PageIndex{14}\).
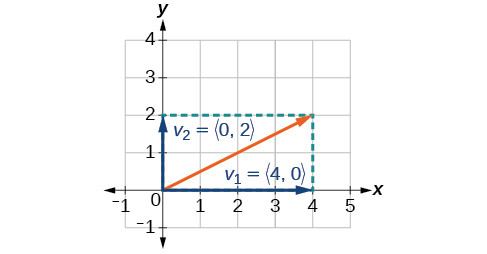
The horizontal component is \(\vec{v_1}=⟨4,0⟩\) and the vertical component is \(\vec{v_2}=⟨0,2⟩\).
Finding the Unit Vector in the Direction of \(v\)
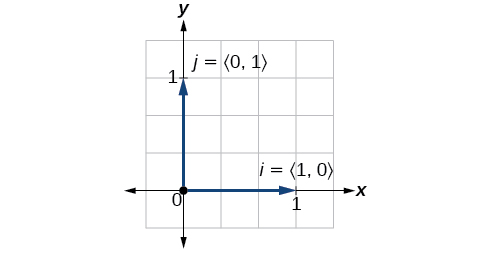
In addition to finding a vector’s components, it is also useful in solving problems to find a vector in the same direction as the given vector, but of magnitude \(1\). We call a vector with a magnitude of \(1\) a unit vector. We can then preserve the direction of the original vector while simplifying calculations.
Unit vectors are defined in terms of components. The horizontal unit vector is written as \(\vec{i}=⟨1,0⟩\) and is directed along the positive horizontal axis. The vertical unit vector is written as \(\vec{j}=⟨0,1⟩\) and is directed along the positive vertical axis. See Figure \(\PageIndex{15}\).
If \(\vec{v}\) is a nonzero vector, then \(\dfrac{v}{| v |}\) is a unit vector in the direction of \(v\). Any vector divided by its magnitude is a unit vector. Notice that magnitude is always a scalar, and dividing by a scalar is the same as multiplying by the reciprocal of the scalar.
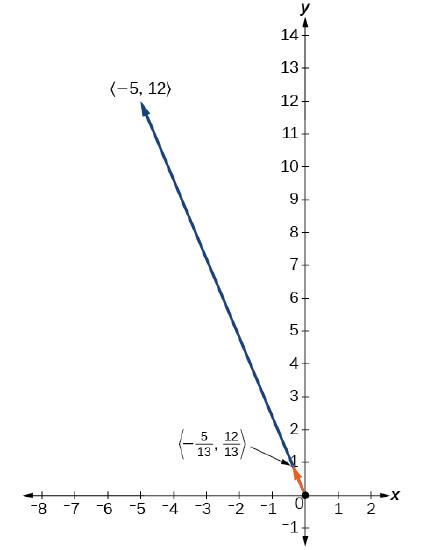
Find a unit vector in the same direction as \(v=⟨−5,12⟩\).
Solution
First, we will find the magnitude.
\[\begin{align*} |v| &= \sqrt{{(−5)}^2+{(12)}^2} \\[4pt] &= \sqrt{25+144} \\[4pt] &=\sqrt{169} \\[4pt] &= 13 \end{align*}\]
Then we divide each component by \(| v |\), which gives a unit vector in the same direction as \(\vec{v}\):
\(\dfrac{v}{| v |} = −\dfrac{5}{13}i+\dfrac{12}{13}j \)
or, in component form
\(\dfrac{v}{| v |}= \left \langle -\dfrac{5}{13},\dfrac{12}{13} \right \rangle\)
See Figure \(\PageIndex{16}\).
Verify that the magnitude of the unit vector equals \(1\). The magnitude of \(−\dfrac{5}{13}i+\dfrac{12}{13}j\) is given as
\[\begin{align*} \sqrt{ {\left(−\dfrac{5}{13}\right)}^2+{ \left(\dfrac{12}{13}\right) }^2 } &= \sqrt{\dfrac{25}{169}+\dfrac{144}{169}} \\[4pt] &= \sqrt{\dfrac{169}{169}}\\ &=1 \end{align*}\]
The vector \(u=\dfrac{5}{13}i+\dfrac{12}{13}j\) is the unit vector in the same direction as \(v=⟨−5,12⟩\).
Performing Operations with Vectors in Terms of \(i\) and \(j\)
So far, we have investigated the basics of vectors: magnitude and direction, vector addition and subtraction, scalar multiplication, the components of vectors, and the representation of vectors geometrically. Now that we are familiar with the general strategies used in working with vectors, we will represent vectors in rectangular coordinates in terms of \(i\) and \(j\).
Given a vector \(\vec{v}\) with initial point \(P=(x_1,y_1)\) and terminal point \(Q=(x_2,y_2)\), \(\vec{v}\) is written as
\[v=(x_2−x_1)i+(y_1−y_2)j\]
The position vector from \((0,0)\) to \((a,b)\), where \((x_2−x_1)=a\) and \((y_2−y_1)=b\), is written as \(\vec{v} = \vec{ai}+ \vec{bj}\). This vector sum is called a linear combination of the vectors \(\vec{i}\) and \(\vec{j}\).
The magnitude of \(\vec{v} = \overrightarrow{ai} + \overrightarrow{bj}\) is given as \(| v |=\sqrt{a^2+b^2}\). See Figure \(\PageIndex{17}\).
.jpg?revision=1)
Given a vector \(\vec{v}\) with initial point \(P=(2,−6)\) and terminal point \(Q=(−6,6)\), write the vector in terms of \(\vec{i}\) and \(\vec{j}\).
Solution
Begin by writing the general form of the vector. Then replace the coordinates with the given values.
\[\begin{align*} v &= (x_2−x_1)i+(y_2−y_1)j \\[4pt] &=(−6−2)i+(6−(−6))j \\[4pt] &= −8i+12j \end{align*}\]
Given initial point \(P_1=(−1,3)\) and terminal point \(P_2=(2,7)\), write the vector \(\vec{v}\) in terms of \(\vec{i}\) and \(\vec{j}\).
Solution
Begin by writing the general form of the vector. Then replace the coordinates with the given values.
\[\begin{align*} v &= (x_2−x_1)i+(y_2−y_1)j \\[4pt] v &= (2−(−1))i+(7−3)j \\[4pt] &= 3i+4j \end{align*}\]
Write the vector \(\vec{u}\) with initial point \(P=(−1,6)\) and terminal point \(Q=(7,−5)\) in terms of \(\vec{i}\) and \(\vec{j}\).
- Answer
-
\(u=8i−11j\)
Performing Operations on Vectors in Terms of \(i\) and \(j\)
When vectors are written in terms of \(i\) and \(j\), we can carry out addition, subtraction, and scalar multiplication by performing operations on corresponding components.
Given \(v = ai + bj\) and \(u = ci + dj\), then
\[\begin{align*} v+u &= (a+c)i+(b+d)j \\[4pt] v−u &= (a−c)i+(b−d)j \end{align*}\]
Find the sum of \(v_1=2i−3j\) and \(v_2=4i+5j\).
Solution
\[\begin{align*} v_1+v_2 &= (2+4)i+(−3+5)j \\[4pt] &= 6i+2j \end{align*}\]
Calculating the Component Form of a Vector: Direction
We have seen how to draw vectors according to their initial and terminal points and how to find the position vector. We have also examined notation for vectors drawn specifically in the Cartesian coordinate plane using \(i\) and \(j\). For any of these vectors, we can calculate the magnitude. Now, we want to combine the key points, and look further at the ideas of magnitude and direction.
Calculating direction follows the same straightforward process we used for polar coordinates. We find the direction of the vector by finding the angle to the horizontal. We do this by using the basic trigonometric identities, but with \(| v |\) replacing \(r\).
Given a position vector \(v=⟨x,y⟩\) and a direction angle \(\theta\),
\[ \begin{align*} \cos \theta &= \dfrac{x}{|v|} \text{ and } \sin \theta=y|v| \\[4pt] x &= |v| \cos \theta \\[4pt] y &= |v| \sin \theta \end{align*}\]
Thus, \(v=xi+yj=| v | \cos \theta i+| v | \sin \theta j\), and magnitude is expressed as \(| v |=\sqrt{x^2+y^2}\).
Write a vector with length \(7\) at an angle of \(135°\) to the positive x-axis in terms of magnitude and direction.
Solution
Using the conversion formulas \(x=| v | \cos \theta i\) and \(y=| v | \sin \theta j\), we find that
\[ \begin{align*} x &= 7\cos(135°)i \\[4pt] &= −\dfrac{7\sqrt{2}}{2} \\[4pt] y &=7 \sin(135°)j \\[4pt] &= \dfrac{7\sqrt{2}}{2} \end{align*}\]
This vector can be written as \(v=7\cos(135°)i+7\sin(135°)j\) or simplified as
\(v=−\dfrac{7\sqrt{2}}{2}i+\dfrac{7\sqrt{2}}{2}j\)
A vector travels from the origin to the point \((3,5)\). Write the vector in terms of magnitude and direction.
- Answer
-
\(v=\sqrt{34}\cos(59°)i+\sqrt{34}\sin(59°)j\)
Magnitude = \(34\)
\(\theta={\tan}^{−1}\left(\dfrac{5}{3}\right)=59.04°\)
Finding the Dot Product of Two Vectors
As we discussed earlier in the section, scalar multiplication involves multiplying a vector by a scalar, and the result is a vector. As we have seen, multiplying a vector by a number is called scalar multiplication. If we multiply a vector by a vector, there are two possibilities: the dot product and the cross product. We will only examine the dot product here; you may encounter the cross product in more advanced mathematics courses.
The dot product of two vectors involves multiplying two vectors together, and the result is a scalar.
The dot product of two vectors \(v=⟨a,b⟩\) and \(u=⟨c,d⟩\) is the sum of the product of the horizontal components and the product of the vertical components.
\[v⋅u=ac+bd\]
To find the angle between the two vectors, use the formula below.
\[\cos \theta=\dfrac{v}{| v |}⋅\dfrac{u}{| u |}\]
Find the dot product of \(v=⟨5,12⟩\) and \(u=⟨−3,4⟩\).
Solution
Using the formula, we have
\[\begin{align*} v⋅u &= ⟨5,12⟩⋅⟨−3,4⟩ \\[4pt] &= 5⋅(−3)+12⋅4 \\[4pt] &= −15+48 \\[4pt] &= 33 \end{align*}\]
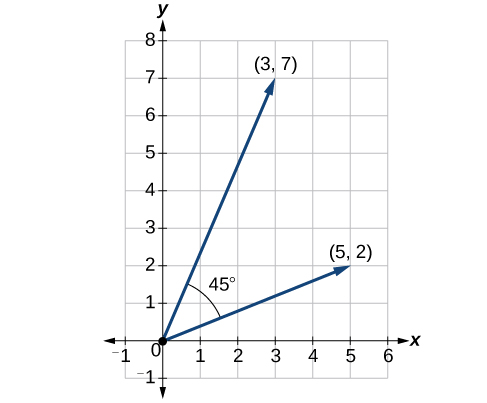
Find the dot product of \(v_1 = 5i + 2j\) and \(v_2 = 3i + 7j\). Then, find the angle between the two vectors.
Solution
Finding the dot product, we multiply corresponding components.
\[ \begin{align*} v_1⋅v_2 &= ⟨5,2⟩⋅⟨3,7⟩ \\[4pt] &= 5⋅3+2⋅7 \\[4pt] &= 15+14 \\[4pt] &= 29 \end{align*}\]
To find the angle between them, we use the formula \(\cos \theta=\dfrac{v}{|v|}⋅\dfrac{u}{|u|}\).
\[\begin{align*} \dfrac{v}{|v|}\cdot \dfrac{u}{|u|} &= \left \langle \dfrac{5}{\sqrt{29}}+\dfrac{2}{\sqrt{29}} \right \rangle \cdot \left \langle \dfrac{3}{\sqrt{58}}+\dfrac{7}{\sqrt{58}} \right \rangle \\[4pt] &=\dfrac{5}{\sqrt{29}}\cdot \dfrac{3}{\sqrt{58}}+\dfrac{2}{\sqrt{29}}\cdot \dfrac{7}{\sqrt{58}} \\[4pt] &= \dfrac{15}{\sqrt{1682}}+\dfrac{14}{\sqrt{1682}}\\ &=\dfrac{29}{\sqrt{1682}} \\[4pt] &= 0.707107 \\[4pt] {\cos}^{-1}(0.707107) &= 45° \end{align*}\]
See Figure \(\PageIndex{18}\).
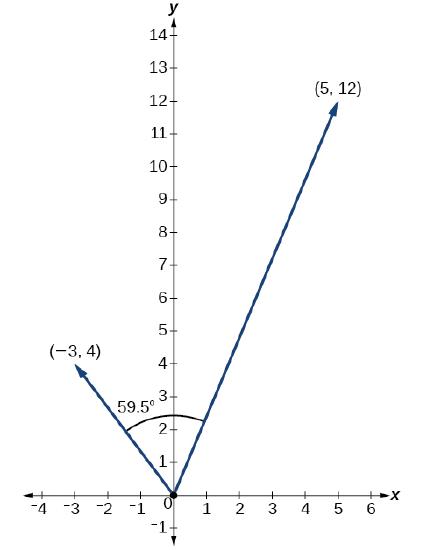
Find the angle between \(u=⟨−3,4⟩\) and \(v=⟨5,12⟩\).
Solution
Using the formula, we have
\[\begin{align*} \theta &= {\cos}^{−1}\left(\dfrac{u}{|u|}⋅\dfrac{v}{|v|}\right) \\[4pt] \left(\dfrac{u}{|u|}⋅\dfrac{v}{|v|}\right) &= \dfrac{−3i+4j}{5}⋅\dfrac{5i+12j}{13} \\[4pt] &= \left(− \dfrac{3}{5}⋅ \dfrac{5}{13}\right)+\left(\dfrac{4}{5}⋅ \dfrac{12}{13}\right) \\[4pt] &= −\dfrac{15}{65}+\dfrac{48}{65} \\[4pt] &= \dfrac{33}{65} \\[4pt] \theta &= {\cos}^{−1}\left(\dfrac{33}{65}\right) \\[4pt] &= 59.5^{\circ} \end{align*}\]
See Figure \(\PageIndex{19}\).
We now have the tools to solve the problem we introduced in the opening of the section.
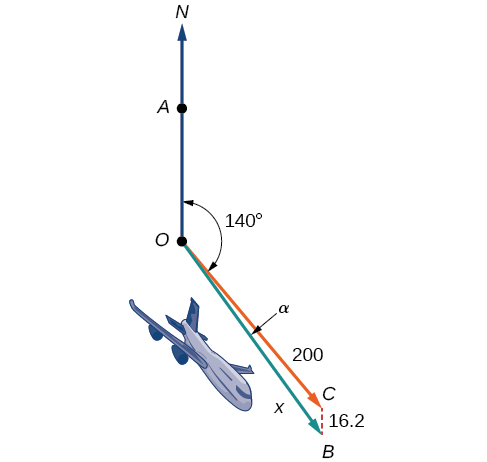
An airplane is flying at an airspeed of \(200\) miles per hour headed on a SE bearing of \(140°\). A north wind (from north to south) is blowing at \(16.2\) miles per hour. What are the ground speed and actual bearing of the plane? See Figure \(\PageIndex{20}\).
Solution
The ground speed is represented by \(x\) in the diagram, and we need to find the angle \(\alpha\) in order to calculate the adjusted bearing, which will be \(140°+\alpha\).
Notice in Figure \(\PageIndex{20}\), that angle \(\angle BCO\) must be equal to angle \(\angle AOC\) by the rule of alternating interior angles, so angle \(\angle BCO\) is 140°. We can find \(x\) by the Law of Cosines:
\[\begin{align*} x^2 &= {(16.2)}^2+{(200)}^2−2(16.2)(200) \cos(140°) \\[4pt] x^2 &= 45,226.41 \\[4pt] x &= \sqrt{45,226.41} \\[4pt] x &= 212.7 \end{align*}\]
The ground speed is approximately \(213\) miles per hour. Now we can calculate the bearing using the Law of Sines.
\[\begin{align*} \dfrac{\sin \alpha}{16.2} &= \dfrac{\sin(140°)}{212.7} \\[4pt] \sin \alpha &= \dfrac{16.2 \sin(140°)}{212.7} \\[4pt] &=0.04896 \\[4pt] {\sin}^{−1}(0.04896) &= 2.8° \end{align*}\]
Therefore, the plane has a SE bearing of \(140°+2.8°=142.8°\). The ground speed is \(212.7\) miles per hour.
Key Concepts
- The position vector has its initial point at the origin. See Example \(\PageIndex{1}\).
- If the position vector is the same for two vectors, they are equal. See Example \(\PageIndex{2}\).
- Vectors are defined by their magnitude and direction. See Example \(\PageIndex{3}\).
- If two vectors have the same magnitude and direction, they are equal. See Example \(\PageIndex{4}\).
- Vector addition and subtraction result in a new vector found by adding or subtracting corresponding elements. See Example \(\PageIndex{5}\).
- Scalar multiplication is multiplying a vector by a constant. Only the magnitude changes; the direction stays the same. See Example \(\PageIndex{6}\) and Example \(\PageIndex{7}\).
- Vectors are comprised of two components: the horizontal component along the positive \(x\)-axis, and the vertical component along the positive \(y\)-axis. See Example \(\PageIndex{8}\).
- The unit vector in the same direction of any nonzero vector is found by dividing the vector by its magnitude.
- The magnitude of a vector in the rectangular coordinate system is \(| v |=\sqrt{a^2+b^2}\). See Example \(\PageIndex{9}\).
- In the rectangular coordinate system, unit vectors may be represented in terms of \(ii\) and \(jj\) where \(i\) represents the horizontal component and \(j\) represents the vertical component. Then, \(v = ai + bj\) is a scalar multiple of \(v\) by real numbers \(a\) and \(b\). See Example \(\PageIndex{10}\) and Example \(\PageIndex{11}\).
- Adding and subtracting vectors in terms of \(i\) and \(j\) consists of adding or subtracting corresponding coefficients of \(i\) and corresponding coefficients of \(j\). See Example \(\PageIndex{12}\).
- A vector \(v = ai + bj\) is written in terms of magnitude and direction as \(v=| v |\cos \theta i+| v |\sin \theta j\). See Example \(\PageIndex{13}\).
- The dot product of two vectors is the product of the \(i\) terms plus the product of the \(j\) terms. See Example \(\PageIndex{14}\).
- We can use the dot product to find the angle between two vectors. Example \(\PageIndex{15}\) and Example \(\PageIndex{16}\).
- Dot products are useful for many types of physics applications. See Example \(\PageIndex{17}\).
Contributors and Attributions
-
Jay Abramson (Arizona State University) with contributing authors. Textbook content produced by OpenStax College is licensed under a Creative Commons Attribution License 4.0 license. Download for free at https://openstax.org/details/books/precalculus.