
3.9: Derivatives of Inverse Functions
- Page ID
- 93378

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Calculate the derivative of an inverse function.
- Recognize the derivatives of the standard inverse trigonometric functions.
In this section we explore the relationship between the derivative of a function and the derivative of its inverse. For functions whose derivatives we already know, we can use this relationship to find derivatives of inverses without having to use the limit definition of the derivative. In particular, we will apply the formula for derivatives of inverse functions to trigonometric functions. This formula may also be used to extend the power rule to rational exponents.
The Derivative of an Inverse Function
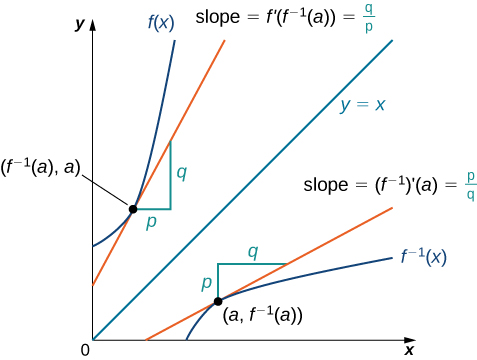
We begin by considering a function and its inverse. If \(f(x)\) is both invertible and differentiable, it seems reasonable that the inverse of \(f(x)\) is also differentiable. Figure \(\PageIndex{1}\) shows the relationship between a function \(f(x)\) and its inverse \(f^{−1}(x)\). Look at the point \(\left(a,\,f^{−1}(a)\right)\) on the graph of \(f^{−1}(x)\) having a tangent line with a slope of
\[\big(f^{−1}\big)′(a)=\dfrac{p}{q}. \nonumber \]
This point corresponds to a point \(\left(f^{−1}(a),\,a\right)\) on the graph of \(f(x)\) having a tangent line with a slope of
\[f′\big(f^{−1}(a)\big)=\dfrac{q}{p}. \nonumber \]
Thus, if \(f^{−1}(x)\) is differentiable at \(a\), then it must be the case that
\(\big(f^{−1}\big)′(a)=\dfrac{1}{f′\big(f^{−1}(a)\big)}\).
We may also derive the formula for the derivative of the inverse by first recalling that \(x=f\big(f^{−1}(x)\big)\). Then by differentiating both sides of this equation (using the chain rule on the right), we obtain
\(1=f′\big(f^{−1}(x)\big)\big(f^{−1}\big)′(x))\).
Solving for \(\big(f^{−1}\big)′(x)\), we obtain
\(\big(f^{−1}\big)′(x)=\dfrac{1}{f′\big(f^{−1}(x)\big)}\).
We summarize this result in the following theorem.
Let \(f(x)\) be a function that is both invertible and differentiable. Let \(y=f^{−1}(x)\) be the inverse of \(f(x)\). For all \(x\) satisfying \(f′\big(f^{−1}(x)\big)≠0\),
\[\dfrac{dy}{dx}=\dfrac{d}{dx}\big(f^{−1}(x)\big)=\big(f^{−1}\big)′(x)=\dfrac{1}{f′\big(f^{−1}(x)\big)}.\label{inverse1} \]
Alternatively, if \(y=g(x)\) is the inverse of \(f(x)\), then
\[g'(x)=\dfrac{1}{f′\big(g(x)\big)}. \label{inverse2} \]
Use the inverse function theorem to find the derivative of \(g(x)=\dfrac{x+2}{x}\). Compare the resulting derivative to that obtained by differentiating the function directly.
Solution
The inverse of \(g(x)=\dfrac{x+2}{x}\) is \(f(x)=\dfrac{2}{x−1}\).
We will use Equation \ref{inverse2} and begin by finding \(f′(x)\). Thus,
\[f′(x)=\dfrac{−2}{(x−1)^2} \nonumber \]
and
\[f′\big(g(x)\big)=\dfrac{−2}{(g(x)−1)^2}=\dfrac{−2}{\left(\dfrac{x+2}{x}−1\right)^2}=−\dfrac{x^2}{2}. \nonumber \]
Finally,
\[g′(x)=\dfrac{1}{f′\big(g(x)\big)}=−\dfrac{2}{x^2}. \nonumber \]
We can verify that this is the correct derivative by applying the quotient rule to \(g(x)\) to obtain
\[g′(x)=−\dfrac{2}{x^2}. \nonumber \]
Use the inverse function theorem to find the derivative of \(g(x)=\dfrac{1}{x+2}\). Compare the result obtained by differentiating \(g(x)\) directly.
- Hint
-
Use the preceding example as a guide.
- Answer
-
\(g′(x)=−\dfrac{1}{(x+2)^2}\)
Use the inverse function theorem to find the derivative of \(g(x)=\sqrt[3]{x}\).
Solution
The function \(g(x)=\sqrt[3]{x}\) is the inverse of the function \(f(x)=x^3\). Since \(g′(x)=\dfrac{1}{f′\big(g(x)\big)}\), begin by finding \(f′(x)\). Thus,
\[f′(x)=3x^2\nonumber \]
and
\[f′\big(g(x)\big)=3\big(\sqrt[3]{x}\big)^2=3x^{2/3}\nonumber \]
Finally,
\[g′(x)=\dfrac{1}{3x^{2/3}}.\nonumber \]
If we were to differentiate \(g(x)\) directly, using the power rule, we would first rewrite \(g(x)=\sqrt[3]{x}\) as a power of \(x\) to get,
\[g(x) = x^{1/3}\nonumber \]
Then we would differentiate using the power rule to obtain
\[g'(x) =\tfrac{1}{3}x^{−2/3} = \dfrac{1}{3x^{2/3}}.\nonumber \]
Find the derivative of \(g(x)=\sqrt[5]{x}\) by applying the inverse function theorem.
- Hint
-
\(g(x)\) is the inverse of \(f(x)=x^5\).
- Answer
-
\(g(x)=\frac{1}{5}x^{−4/5}\)
From the previous example, we see that we can use the inverse function theorem to extend the power rule to exponents of the form \(\dfrac{1}{n}\), where \(n\) is a positive integer. This extension will ultimately allow us to differentiate \(x^q\), where \(q\) is any rational number.
The power rule may be extended to rational exponents. That is, if \(n\) is a positive integer, then
\[\dfrac{d}{dx}\big(x^{1/n}\big)=\dfrac{1}{n} x^{(1/n)−1}. \nonumber \]
Also, if \(n\) is a positive integer and \(m\) is an arbitrary integer, then
\[\dfrac{d}{dx}\big(x^{m/n}\big)=\dfrac{m}{n}x^{(m/n)−1}. \nonumber \]
The function \(g(x)=x^{1/n}\) is the inverse of the function \(f(x)=x^n\). Since \(g′(x)=\dfrac{1}{f′\big(g(x)\big)}\), begin by finding \(f′(x)\). Thus,
\(f′(x)=nx^{n−1}\) and \(f′\big(g(x)\big)=n\big(x^{1/n}\big)^{n−1}=nx^{(n−1)/n}\).
Finally,
\(g′(x)=\dfrac{1}{nx^{(n−1)/n}}=\dfrac{1}{n}x^{(1−n)/n}=\dfrac{1}{n}x^{(1/n)−1}\).
To differentiate \(x^{m/n}\) we must rewrite it as \((x^{1/n})^m\) and apply the chain rule. Thus,
\[\dfrac{d}{dx}\big(x^{m/n}\big)=\dfrac{d}{dx}\big((x^{1/n}\big)^m)=m\big(x^{1/n}\big)^{m−1}⋅\dfrac{1}{n}x^{(1/n)−1}=\dfrac{m}{n}x^{(m/n)−1}. \nonumber \]
□
Find the equation of the line tangent to the graph of \(y=x^{2/3}\) at \(x=8\).
Solution
First find \(\dfrac{dy}{dx}\) and evaluate it at \(x=8\). Since
\[\dfrac{dy}{dx}=\frac{2}{3}x^{−1/3} \nonumber \]
and
\[\dfrac{dy}{dx}\Bigg|_{x=8}=\frac{1}{3}\nonumber \]
the slope of the tangent line to the graph at \(x=8\) is \(\frac{1}{3}\).
Substituting \(x=8\) into the original function, we obtain \(y=4\). Thus, the tangent line passes through the point \((8,4)\). Substituting into the point-slope formula for a line, we obtain the tangent line
\[y=\tfrac{1}{3}x+\tfrac{4}{3}. \nonumber \]
Find the derivative of \(s(t)=\sqrt{2t+1}\).
- Hint
-
Use the chain rule.
- Answer
-
\(s′(t)=(2t+1)^{−1/2}\)
Derivatives of Inverse Trigonometric Functions
We now turn our attention to finding derivatives of inverse trigonometric functions. These derivatives will prove invaluable in the study of integration later in this text. The derivatives of inverse trigonometric functions are quite surprising in that their derivatives are actually algebraic functions. Previously, derivatives of algebraic functions have proven to be algebraic functions and derivatives of trigonometric functions have been shown to be trigonometric functions. Here, for the first time, we see that the derivative of a function need not be of the same type as the original function.
Use the inverse function theorem to find the derivative of \(g(x)=\sin^{−1}x\).
Solution
Since for \(x\) in the interval \(\left[−\frac{π}{2},\frac{π}{2}\right],f(x)=\sin x\) is the inverse of \(g(x)=\sin^{−1}x\), begin by finding \(f′(x)\). Since
\[f′(x)=\cos x \nonumber \]
and
\[f′\big(g(x)\big)=\cos \big( \sin^{−1}x\big)=\sqrt{1−x^2} \nonumber \]
we see that
\[g′(x)=\dfrac{d}{dx}\big(\sin^{−1}x\big)=\dfrac{1}{f′\big(g(x)\big)}=\dfrac{1}{\sqrt{1−x^2}} \nonumber \]
Analysis
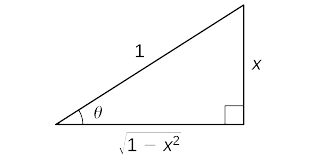
To see that \(\cos(\sin^{−1}x)=\sqrt{1−x^2}\), consider the following argument. Set \(\sin^{−1}x=θ\). In this case, \(\sin θ=x\) where \(−\frac{π}{2}≤θ≤\frac{π}{2}\). We begin by considering the case where \(0<θ<\frac{π}{2}\). Since \(θ\) is an acute angle, we may construct a right triangle having acute angle \(θ\), a hypotenuse of length \(1\) and the side opposite angle \(θ\) having length \(x\). From the Pythagorean theorem, the side adjacent to angle \(θ\) has length \(\sqrt{1−x^2}\). This triangle is shown in Figure \(\PageIndex{2}\) Using the triangle, we see that \(\cos(\sin^{−1}x)=\cos θ=\sqrt{1−x^2}\).
In the case where \(−\frac{π}{2}<θ<0\), we make the observation that \(0<−θ<\frac{π}{2}\) and hence
\(\cos\big(\sin^{−1}x\big)=\cos θ=\cos(−θ)=\sqrt{1−x^2}\).
Now if \(θ=\frac{π}{2}\) or \(θ=−\frac{π}{2},x=1\) or \(x=−1\), and since in either case \(\cosθ=0\) and \(\sqrt{1−x^2}=0\), we have
\(\cos\big(\sin^{−1}x\big)=\cosθ=\sqrt{1−x^2}\).
Consequently, in all cases,
\[\cos\big(\sin^{−1}x\big)=\sqrt{1−x^2}.\nonumber \]
Apply the chain rule to the formula derived in Example \(\PageIndex{4A}\) to find the derivative of \(h(x)=\sin^{−1}\big(g(x)\big)\) and use this result to find the derivative of \(h(x)=\sin^{−1}(2x^3).\)
Solution
Applying the chain rule to \(h(x)=\sin^{−1}\big(g(x)\big)\), we have
\(h′(x)=\dfrac{1}{\sqrt{1−\big(g(x)\big)^2}}g′(x)\).
Now let \(g(x)=2x^3,\) so \(g′(x)=6x^2\). Substituting into the previous result, we obtain
\(\begin{align*} h′(x)&=\dfrac{1}{\sqrt{1−4x^6}}⋅6x^2\\[4pt]&=\dfrac{6x^2}{\sqrt{1−4x^6}}\end{align*}\)
Use the inverse function theorem to find the derivative of \(g(x)=\tan^{−1}x\).
- Hint
-
The inverse of \(g(x)\) is \(f(x)=\tan x\). Use Example \(\PageIndex{4A}\) as a guide.
- Answer
-
\(g′(x)=\dfrac{1}{1+x^2}\)
The derivatives of the remaining inverse trigonometric functions may also be found by using the inverse function theorem. These formulas are provided in the following theorem.
\[\begin{align} \dfrac{d}{dx}\big(\sin^{−1}x\big) &=\dfrac{1}{\sqrt{1−x^2}} \label{trig1} \\[4pt] \dfrac{d}{dx}\big(\cos^{−1}x\big) &=\dfrac{−1}{\sqrt{1−x^2}} \label{trig2} \\[4pt] \dfrac{d}{dx}\big(\tan^{−1}x\big) &=\dfrac{1}{1+x^2} \label{trig3} \\[4pt] \dfrac{d}{dx}\big(\cot^{−1}x\big) &=\dfrac{−1}{1+x^2} \label{trig4} \\[4pt] \dfrac{d}{dx}\big(\sec^{−1}x\big) &=\dfrac{1}{|x|\sqrt{x^2−1}} \label{trig5} \\[4pt] \dfrac{d}{dx}\big(\csc^{−1}x\big) &=\dfrac{−1}{|x|\sqrt{x^2−1}} \label{trig6} \end{align} \]
Find the derivative of \(f(x)=\tan^{−1}(x^2).\)
Solution
Let \(g(x)=x^2\), so \(g′(x)=2x\). Substituting into Equation \ref{trig3}, we obtain
\(f′(x)=\dfrac{1}{1+(x^2)^2}⋅(2x).\)
Simplifying, we have
\(f′(x)=\dfrac{2x}{1+x^4}\).
Find the derivative of \(h(x)=x^2 \sin^{−1}x.\)
Solution
By applying the product rule, we have
\(h′(x)=2x\sin^{−1}x+\dfrac{1}{\sqrt{1−x^2}}⋅x^2\)
Find the derivative of \(h(x)=\cos^{−1}(3x−1).\)
- Hint
-
Use Equation \ref{trig2}. with \(g(x)=3x−1\)
- Answer
-
\(h′(x)=\dfrac{−3}{\sqrt{6x−9x^2}}\)
The position of a particle at time \(t\) is given by \(s(t)=\tan^{−1}\left(\frac{1}{t}\right)\) for \(t≥ \ce{1/2}\). Find the velocity of the particle at time \( t=1\).
Solution
Begin by differentiating \(s(t)\) in order to find \(v(t)\).Thus,
\(v(t)=s′(t)=\dfrac{1}{1+\left(\frac{1}{t}\right)^2}⋅\dfrac{−1}{t^2}\).
Simplifying, we have
\(v(t)=−\dfrac{1}{t^2+1}\).
Thus, \(v(1)=−\dfrac{1}{2}.\)
Find the equation of the line tangent to the graph of \(f(x)=\sin^{−1}x\) at \(x=0.\)
- Hint
-
\(f′(0)\) is the slope of the tangent line.
- Answer
-
\(y=x\)
Key Concepts
- The inverse function theorem allows us to compute derivatives of inverse functions without using the limit definition of the derivative.
- We can use the inverse function theorem to develop differentiation formulas for the inverse trigonometric functions.
Key Equations
- Inverse function theorem
\((f^{−1})′(x)=\dfrac{1}{f′\big(f^{−1}(x)\big)}\) whenever \(f′\big(f^{−1}(x)\big)≠0\) and \(f(x)\) is differentiable.
- Power rule with rational exponents
\(\dfrac{d}{dx}\big(x^{m/n}\big)=\dfrac{m}{n}x^{(m/n)−1}.\)
- Derivative of inverse sine function
\(\dfrac{d}{dx}\big(\sin^{−1}x\big)=\dfrac{1}{\sqrt{1−x^2}}\)
- Derivative of inverse cosine function
\(\dfrac{d}{dx}\big(\cos^{−1}x\big)=\dfrac{−1}{\sqrt{1−x^2}}\)
Derivative of inverse tangent function
\(\dfrac{d}{dx}\big(\tan^{−1}x\big)=\dfrac{1}{1+x^2}\)
Derivative of inverse cotangent function
\(\dfrac{d}{dx}\big(\cot^{−1}x\big)=\dfrac{−1}{1+x^2}\)
Derivative of inverse secant function
\(\dfrac{d}{dx}\big(\sec^{−1}x\big)=\dfrac{1}{|x|\sqrt{x^2−1}}\)
Derivative of inverse cosecant function
\(\dfrac{d}{dx}\big(\csc^{−1}x\big)=\dfrac{−1}{|x|\sqrt{x^2−1}}\)
Gilbert Strang (MIT) and Edwin “Jed” Herman (Harvey Mudd) with many contributing authors. This content by OpenStax is licensed with a CC-BY-SA-NC 4.0 license. Download for free at http://cnx.org.
- Paul Seeburger (Monroe Community College) added the second half of Example \(\PageIndex{2}\).