
5.4: Special Linear Transformations in R²


- Last updated
- May 12, 2023
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
- Find the matrix of rotations and reflections in R2 and determine the action of each on a vector in R2.
In this section, we will examine some special examples of linear transformations in R2 including rotations and reflections. We will use the geometric descriptions of vector addition and scalar multiplication discussed earlier to show that a rotation of vectors through an angle and reflection of a vector across a line are examples of linear transformations.
More generally, denote a transformation given by a rotation by T. Why is such a transformation linear? Consider the following picture which illustrates a rotation. Let →u,→v denote vectors.
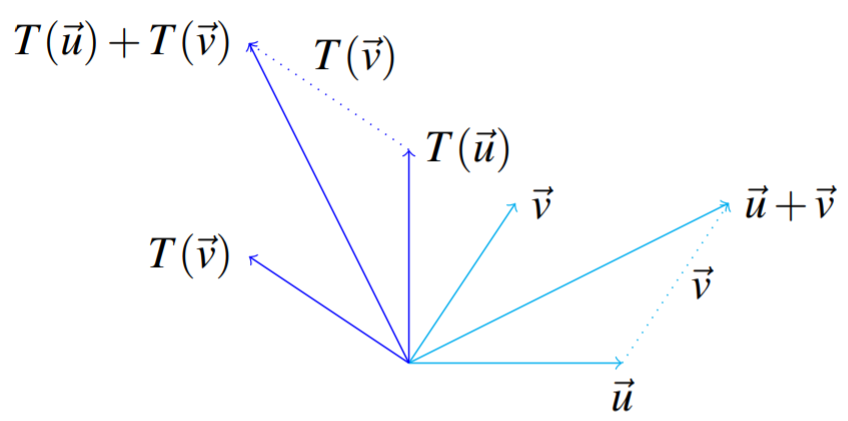
Let’s consider how to obtain T[→u+→v]. Simply, you add T(→u) and T(→v). Here is why. If you add T(→u) to T(→v) you get the diagonal of the parallelogram determined by T(→u) and T(→v), as this action is our usual vector addition. Now, suppose we first add →u and →v, and then apply the transformation T to →u+→v. Hence, we find T(→u+→v). As shown in the diagram, this will result in the same vector. In other words, T(→u+→v)=T(→u)+T(→v).
This is because the rotation preserves all angles between the vectors as well as their lengths. In particular, it preserves the shape of this parallelogram. Thus both T[→u]+T[→v] and T[→u+→v] give the same vector. It follows that T distributes across addition of the vectors of R2.
Similarly, if k is a scalar, it follows that T[k→u]=kT[→u]. Thus rotations are an example of a linear transformation by Definition 9.6.1.
The following theorem gives the matrix of a linear transformation which rotates all vectors through an angle of θ.
Let Rθ:R2→R2 be a linear transformation given by rotating vectors through an angle of θ. Then the matrix A of Rθ is given by [cos[θ]−sin[θ]sin[θ]cos[θ]]
- Proof
-
Let →e1=[10] and →e2=[01]. These identify the geometric vectors which point along the positive x axis and positive y axis as shown.
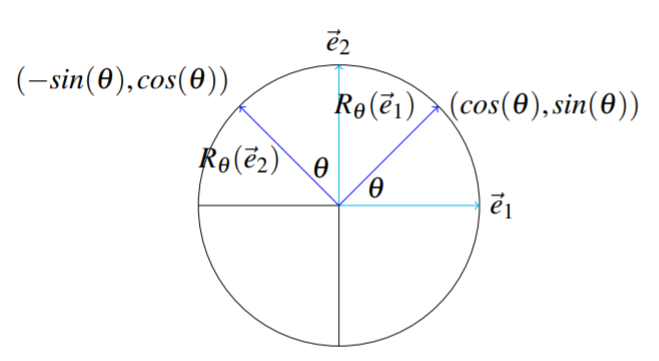
Figure 5.4.2 From Theorem 5.2.2, we need to find Rθ(→e1) and Rθ(→e2), and use these as the columns of the matrix A of T. We can use cos,sin of the angle θ to find the coordinates of Rθ(→e1) as shown in the above picture. The coordinates of Rθ(→e2) also follow from trigonometry. Thus Rθ(→e1)=[cosθsinθ],Rθ(→e2)=[−sinθcosθ] Therefore, from Theorem 5.2.2, A=[cosθ−sinθsinθcosθ]
We can also prove this algebraically without the use of the above picture. The definition of [cos[θ],sin[θ]] is as the coordinates of the point of Rθ(→e1). Now the point of the vector →e2 is exactly π/2 further along the unit circle from the point of →e1, and therefore after rotation through an angle of θ the coordinates x and y of the point of Rθ(→e2) are given by [x,y]=[cos[θ+π/2],sin[θ+π/2]]=[−sinθ,cosθ]
Consider the following example.
Let Rπ2:R2→R2 denote rotation through π/2. Find the matrix of Rπ2. Then, find Rπ2(→x) where →x=[1−2].
Solution
By Theorem 5.4.1, the matrix of Rπ2 is given by [cos[θ]−sin[θ]sin[θ]cos[θ]]=[cos[π/2]−sin[π/2]sin[π/2]cos[π/2]]=[0−110]
To find Rπ2(→x), we multiply the matrix of Rπ2 by →x as follows [0−110][1−2]=[21]
Below is a video on finding the transformation matrix ifor a 2D rotation.
We now look at an example of a linear transformation involving two angles.
Find the matrix of the linear transformation which is obtained by first rotating all vectors through an angle of ϕ and then through an angle θ. Hence the linear transformation rotates all vectors through an angle of θ+ϕ.
Solution
Let Rθ+ϕ denote the linear transformation which rotates every vector through an angle of θ+ϕ. Then to obtain Rθ+ϕ, we first apply Rϕ and then Rθ where Rϕ is the linear transformation which rotates through an angle of ϕ and Rθ is the linear transformation which rotates through an angle of θ. Denoting the corresponding matrices by Aθ+ϕ, Aϕ, and Aθ, it follows that for every →u Rθ+ϕ[→u]=Aθ+ϕ→u=AθAϕ→u=RθRϕ[→u] Notice the order of the matrices here!
Consequently, you must have Aθ+ϕ=[cos[θ+ϕ]−sin[θ+ϕ]sin[θ+ϕ]cos[θ+ϕ]]=[cosθ−sinθsinθcosθ][cosϕ−sinϕsinϕcosϕ]=AθAϕ
The usual matrix multiplication yields Aθ+ϕ=[cos[θ+ϕ]−sin[θ+ϕ]sin[θ+ϕ]cos[θ+ϕ]]=[cosθcosϕ−sinθsinϕ−cosθsinϕ−sinθcosϕsinθcosϕ+cosθsinϕcosθcosϕ−sinθsinϕ]=AθAϕ
Don’t these look familiar? They are the usual trigonometric identities for the sum of two angles derived here using linear algebra concepts.
Here we have focused on rotations in two dimensions. However, you can consider rotations and other geometric concepts in any number of dimensions. This is one of the major advantages of linear algebra. You can break down a difficult geometrical procedure into small steps, each corresponding to multiplication by an appropriate matrix. Then by multiplying the matrices, you can obtain a single matrix which can give you numerical information on the results of applying the given sequence of simple procedures.
Linear transformations which reflect vectors across a line are a second important type of transformations in R2. Consider the following theorem.
Let Qm:R2→R2 be a linear transformation given by reflecting vectors over the line →y=m→x. Then the matrix of Qm is given by 11+m2[1−m22m2mm2−1]
Consider the following example.
Let Q2:R2→R2 denote reflection over the line →y=2→x. Then Q2 is a linear transformation. Find the matrix of Q2. Then, find Q2(→x) where →x=[1−2].
Solution
By Theorem 5.4.2, the matrix of Q2 is given by 11+m2[1−m22m2mm2−1]=11+(2)2[1−(2)22(2)2(2)(2)2−1]=15[−3883]
To find Q2(→x) we multiply \vec{x} by the matrix of Q_2 as follows: \frac{1}{5} \left [ \begin{array}{rr} -3 & 8 \\ 8 & 3 \end{array} \right ] \left [ \begin{array}{r} 1 \\ -2 \end{array} \right ] = \left [ \begin{array}{r} - \frac{19}{5} \\ \frac{2}{5} \end{array} \right ]\nonumber
Below is a video on sketching a linear transformation of a rectangle given the transformation matrix (reflection).
Consider the following example which incorporates a reflection as well as a rotation of vectors.
Find the matrix of the linear transformation which is obtained by first rotating all vectors through an angle of \pi /6 and then reflecting through the x axis.
Solution
By Theorem \PageIndex{1}, the matrix of the transformation which involves rotating through an angle of \pi /6 is \left [ \begin{array}{rr} \cos \left [ \pi /6\right ] & -\sin \left [ \pi /6\right ] \\ \sin \left [ \pi /6\right ] & \cos \left [ \pi /6\right ] \end{array} \right ] =\left [ \begin{array}{cc} \frac{1}{2}\sqrt{3} & - \frac{1}{2} \\ \frac{1}{2} & \frac{1}{2}\sqrt{3} \end{array} \right ]\nonumber
Reflecting across the x axis is the same action as reflecting vectors over the line \vec{y}=m\vec{x} with m=0. By Theorem \PageIndex{2}, the matrix for the transformation which reflects all vectors through the x axis is \frac{1}{1+m^2} \left [ \begin{array}{cc} 1-m^2 & 2m \\ 2m & m^2-1 \end{array} \right ] = \frac{1}{1+(0)^2} \left [ \begin{array}{cc} 1-(0)^2 & 2(0) \\ 2(0) & (0)^2-1 \end{array} \right ] = \left [ \begin{array}{rr} 1 & 0 \\ 0 & -1 \end{array} \right ]\nonumber
Therefore, the matrix of the linear transformation which first rotates through \pi /6 and then reflects through the x axis is given by \left [ \begin{array}{rr} 1 & 0 \\ 0 & -1 \end{array} \right ] \left [ \begin{array}{rr} \frac{1}{2}\sqrt{3} & - \frac{1}{2} \\ \frac{1}{2} & \frac{1}{2}\sqrt{3} \end{array} \right ] = \ \left [ \begin{array}{rr} \frac{1}{2}\sqrt{3} & - \frac{1}{2} \\ - \frac{1}{2} & - \frac{1}{2}\sqrt{3} \end{array} \right ]\nonumber
Below is a video on describing the range or image of a linear transformation (line reflection).
