
11.2: Introduction to Differential Equations



- Last updated
- May 12, 2023
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Differential Equations
The laws of physics are generally written down as differential equations. Therefore, all of science and engineering use differential equations to some degree. Understanding differential equations is essential to understanding almost anything you will study in your science and engineering classes. You can think of mathematics as the language of science, and differential equations are one of the most important parts of this language as far as science and engineering are concerned. As an analogy, suppose all your classes from now on were given in Swahili. It would be important to first learn Swahili, or you would have a very tough time getting a good grade in your classes.
You saw many differential equations already without perhaps knowing about it. And you even solved simple differential equations when you took calculus. Let us see an example you may not have seen: dxdt+x=2cost. Here x is the dependent variable and t is the independent variable. Equation (???) is a basic example of a differential equation. It is an example of a first order differential equation, since it involves only the first derivative of the dependent variable. This equation arises from Newton’s law of cooling where the ambient temperature oscillates with time.
Solutions of Differential Equations
Solving the differential equation means finding x in terms of t. That is, we want to find a function of t, which we call x, such that when we plug x, t, and dxdt into (???), the equation holds; that is, the left hand side equals the right hand side. It is the same idea as it would be for a normal (algebraic) equation of just x and t. We claim that x=x(t)=cost+sint is a solution. How do we check? We simply plug x into equation (???)! First we need to compute dxdt. We find that dxdt=−sint+cost. Now let us compute the left-hand side of (???). dxdt+x=(−sint+cost)⏟dxdt+(cost+sint)⏟x=2cost. Yay! We got precisely the right-hand side. But there is more! We claim x=cost+sint+e−t is also a solution. Let us try, dxdt=−sint+cost−e−t. We plug into the left-hand side of (???) dxdt+x=(−sint+cost−e−t)⏟dxdt+(cost+sint+e−t)⏟x=2cost. And it works yet again!
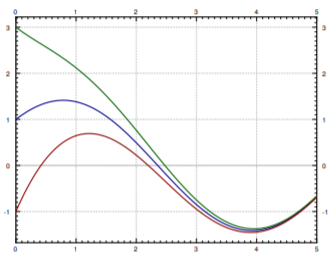
So there can be many different solutions. For this equation all solutions can be written in the form x=cost+sint+Ce−t, for some constant C. Different constants C will give different solutions, so there are really infinitely many possible solutions. See Figure 11.2.1 for the graph of a few of these solutions. We will see how we find these solutions a few lectures from now.
Solving differential equations can be quite hard. There is no general method that solves every differential equation. We will generally focus on how to get exact formulas for solutions of certain differential equations, but we will also spend a little bit of time on getting approximate solutions. And we will spend some time on understanding the equations without solving them.
Most of this book is dedicated to ordinary differential equations or ODEs, that is, equations with only one independent variable, where derivatives are only with respect to this one variable. If there are several independent variables, we get partial differential equations or PDEs.
Even for ODEs, which are very well understood, it is not a simple question of turning a crank to get answers. When you can find exact solutions, they are usually preferable to approximate solutions. It is important to understand how such solutions are found. Although in real applications you will leave much of the actual calculations to computers, you need to understand what they are doing. It is often necessary to simplify or transform your equations into something that a computer can understand and solve. You may even need to make certain assumptions and changes in your model to achieve this.
To be a successful engineer or scientist, you will be required to solve problems in your job that you never saw before. It is important to learn problem solving techniques, so that you may apply those techniques to new problems. A common mistake is to expect to learn some prescription for solving all the problems you will encounter in your later career. This course is no exception.
Below is a video on verifying a solution to a differential equation.

Differential Equations in Practice
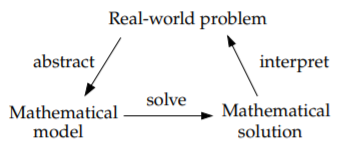
So how do we use differential equations in science and engineering? First, we have some real-world problem we wish to understand. We make some simplifying assumptions and create a mathematical model. That is, we translate the real-world situation into a set of differential equations. Then we apply mathematics to get some sort of a mathematical solution. There is still something left to do. We have to interpret the results. We have to figure out what the mathematical solution says about the real-world problem we started with.
Learning how to formulate the mathematical model and how to interpret the results is what your physics and engineering classes do. In this course, we will focus mostly on the mathematical analysis. Sometimes we will work with simple real-world examples so that we have some intuition and motivation about what we are doing.
Let us look at an example of this process. One of the most basic differential equations is the standard exponential growth model. Let P denote the population of some bacteria on a Petri dish. We assume that there is enough food and enough space. Then the rate of growth of bacteria is proportional to the population—a large population grows quicker. Let t denote time (say in seconds) and P the population. Our model is dPdt=kP, for some positive constant k>0.
Suppose there are 100 bacteria at time 0 and 200 bacteria 10 seconds later. How many bacteria will there be 1 minute from time 0 (in 60 seconds)?
Solution
First we need to solve the equation. We claim that a solution is given by P(t)=Cekt, where C is a constant. Let us try: dPdt=Ckekt=kP. And it really is a solution.
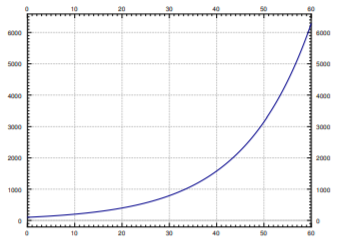
OK, now what? We do not know C, and we do not know k. But we know something. We know P(0)=100, and we know P(10)=200. Let us plug these conditions in and see what happens. 100=P(0)=Cek0=C,200=P(10)=100ek10. Therefore, 2=e10k or ln210=k≈0.069. So P(t)=100e(ln2)t/10≈100e0.069t. At one minute, t=60, the population is P(60)=6400. See Figure 11.2.2.
Let us talk about the interpretation of the results. Does our solution mean that there must be exactly 6400 bacteria on the plate at 60s? No! We made assumptions that might not be true exactly, just approximately. If our assumptions are reasonable, then there will be approximately 6400 bacteria. Also, in real life P is a discrete quantity, not a real number. However, our model has no problem saying that for example at 61 seconds, P(61)≈6859.35.
Normally, the k in P′=kP is known, and we want to solve the equation for different initial conditions. What does that mean? Take k=1 for simplicity. Suppose we want to solve the equation dPdt=P subject to P(0)=1000 (the initial condition). Then the solution turns out to be (exercise) P(t)=1000et.
We call P(t)=Cet the general solution, as every solution of the equation can be written in this form for some constant C. We need an initial condition to find out what C is, in order to find the particular solution we are looking for. Generally, when we say "particular solution," we just mean some solution.
Below is a video on verifying a solution to a differential equation and finding a particular solution.

Fundamental Equations
A few equations appear often and it is useful to just memorize what their solutions are. Let us call them the four fundamental equations. Their solutions are reasonably easy to guess by recalling properties of exponentials, sines, and cosines. They are also simple to check, which is something that you should always do. No need to wonder if you remembered the solution correctly.
First such equation is dydx=ky, for some constant k>0. Here y is the dependent and x the independent variable. The general solution for this equation is y(x)=Cekx. We saw above that this function is a solution, although we used different variable names.
Next, dydx=−ky, for some constant k>0. The general solution for this equation is y(x)=Ce−kx.
Check that the y given is really a solution to the equation.
Next, take the second order differential equation d2ydx2=−k2y, for some constant k>0. The general solution for this equation is y(x)=C1cos(kx)+C2sin(kx). Since the equation is a second order differential equation, we have two constants in our general solution.
Check that the y given is really a solution to the equation.
Finally, consider the second order differential equation d2ydx2=k2y, for some constant k>0. The general solution for this equation is y(x)=C1ekx+C2e−kx, or y(x)=D1cosh(kx)+D2sinh(kx).
For those that do not know, cosh and sinh are defined by coshx=ex+e−x2,sinhx=ex−e−x2. They are called the hyperbolic cosine and hyperbolic sine. These functions are sometimes easier to work with than exponentials. They have some nice familiar properties such as cosh0=1, sinh0=0, and ddxcoshx=sinhx (no that is not a typo) and ddxsinhx=coshx.
Check that both forms of the y given are really solutions to the equation.
In equations of higher order, you get more constants you must solve for to get a particular solution. The equation d2ydx2=0 has the general solution y=C1x+C2; simply integrate twice and don’t forget about the constant of integration. Consider the initial conditions y(0)=2 and y′(0)=3. We plug in our general solution and solve for the constants: 2=y(0)=C1⋅0+C2=C2,3=y′(0)=C1. In other words, y=3x+2 is the particular solution we seek.
An interesting note about cosh: The graph of cosh is the exact shape of a hanging chain. This shape is called a catenary. Contrary to popular belief this is not a parabola. If you invert the graph of cosh, it is also the ideal arch for supporting its weight. For example, the gateway arch in Saint Louis is an inverted graph of cosh—if it were just a parabola it might fall. The formula used in the design is inscribed inside the arch: y=−127.7ft⋅cosh(x/127.7ft)+757.7ft.