
1.2: Relations
- Page ID
- 119142

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)This section's material is considered a prerequisite for this course and is not in the curriculum. As such, it is only provided for interested students to read independently. It is not to be covered during lectures (unless you have an immense amount of extra time or if you have a corequisite with this course).
- Graph relations on the Cartesian plane.
- Graph equations using the Fundamental Graphing Principle.
- Determine the intercepts of a graph.
Graphing Relations
From one point of view, all of College Algebra can be thought of as studying sets of points in the plane. We can discuss those sets in more detail with the Cartesian Plane now fresh in our memory. As usual, we begin with a definition.
A relation is a set of points in the plane.
Since relations are sets, we can describe them using the techniques presented in our previous work. That is, we can verbally describe a relation using the roster method or set-builder notation. Since the elements in a relation are points in the plane, we often describe the relation graphically or algebraically as well. Depending on the situation, one method may be easier or more convenient to use than another. As an example, consider the relation \(\ R=\{(-2,1),(4,3),(0,-3)\}\). As written, \(R\) is described using the roster method. Since \(R\) consists of points in the plane, we follow our instinct and plot the points. Doing so produces the graph of \(R\).

In the following example, we graph a variety of relations.
Graph the following relations.
- \(A=\{(0,0),(-3,1),(4,2),(-3,2)\}\)
- \(H L S_{1}=\{(x, 3) \mid-2 \leq x \leq 4\}\)
- \(H L S_{2}=\{(x, 3) \mid-2 \leq x<4\}\)
- \(V=\{(3, y) \mid y \text { is a real number }\}\)
- \(H=\{(x, y) \mid y=-2\}\)
- \(R=\{(x, y) \mid 1<y \leq 3\}\)
- Solutions
-
- To graph \(A\), we plot all of the points that belong to \(A\), as shown in Figure \( \PageIndex{1A} \).
- Don't let the notation in this part fool you. The name of this relation is \(H L S_{1}\), just like the name of the relation in number 1 was \(A\). The letters and numbers are just part of its name, just like the numbers and letters of the phrase "King George III" were part of George's name. In words, \(\{(x, 3) \mid-2 \leq x \leq 4\}\) reads "the set of points \((x, 3)\) such that \(-2 \leq x \leq 4\)." All of these points have the same \( y \)-coordinate, 3, but the \( x \)-coordinate is allowed to vary between −2 and 4, inclusive. Some of the points which belong to \(H L S_{1}\) include some friendly points like: \((−2, 3), (−1, 3), (0, 3), (1, 3), (2, 3), (3, 3),\) and \((4, 3)\). However, \(H L S_{1}\) also contains the points \((0.829,3),\left(-\frac{5}{6}, 3\right),(\sqrt{\pi}, 3)\), and so on. It is impossible to list all of these points, which is why the variable \( x\) is used.1 Plotting several friendly representative points should convince you that \( H L S_{1}\) describes the horizontal line segment from the point \((−2, 3)\) up to and including the point \((4, 3)\).

Figures \( \PageIndex{1A} \) (left) and \( \PageIndex{1B} \) (right) - \(H L S_{2}\) is hauntingly similar to \( H L S_{1}\). The only difference between the two is that we have \(-2 \leq x \lt 4 \) instead of \(-2 \leq x \leq 4\). This means that we still get a horizontal line segment that includes \((−2, 3)\) and extends to \((4, 3)\), but we do not include \((4, 3)\) because of the strict inequality \(x < 4\). How do we denote this on our graph? It is a common mistake to make the graph start at \((−2, 3)\) and end at \((3, 3)\) (see Figure \( \PageIndex{2A} \)). The problem with this graph is that we are forgetting about the points like \((3.1, 3)\), \((3.5, 3)\), \((3.9, 3)\), \((3.99, 3)\), and so forth. There is no real number that comes "immediately before" \(4\), so to describe the set of points we want, we draw the horizontal line segment starting at \((−2, 3)\) and draw an open circle at \((4, 3)\) as depicted in Figure \( \PageIndex{2B} \).

Figures \( \PageIndex{2A} \) (left) and \( \PageIndex{2B} \) (right) - Next, we come to the relation \(V\), described as the set of points \((3, y)\) such that \(y\) is a real number. All of these points have an \( x \)-coordinate of \( 3 \), but the \( y \)-coordinate is free to be whatever it wants to be, without restriction. Plotting a few "friendly" points of \(V\) should convince you that all the points of \(V\) lie on the vertical line \(x = 3\). Since there is no restriction on the \( y \)-coordinate, we put arrows on the end of the portion of the line we draw to indicate it extends indefinitely in both directions. The graph of \(V\) is shown in Figure \( \PageIndex{3A} \).
- Though written slightly differently, the relation \( H=\{(x, y) \mid y=-2\}\) is similar to the relation \(V\) above in that only one of the coordinates, in this case the \( y \)-coordinate, is specified, leaving \(x\) to be "free." Plotting some representative points gives us the horizontal line \( y = −2\) (see Figure \( \PageIndex{3B} \)).

Figures \( \PageIndex{3A} \) (left) and \( \PageIndex{3B} \) (right) - For our last example, we turn to \(R=\{(x, y) \mid 1<y \leq 3\}\). As in the previous example, \(x\) is free to be whatever it likes. The value of \(y\), on the other hand, while not completely free, is permitted to roam between \( 1 \) and \( 3 \) excluding \( 1 \), but including \( 3 \). After plotting some friendly elements of \( R\), it should become clear that \(R\) consists of the region between the horizontal lines \(y = 1\) and \(y = 3\). Since \(R\) requires that the \( y \)-coordinates be greater than \( 1 \), but not equal to \( 1 \), we dash the line \( y = 1\) to indicate that those points do not belong to \( R\) (see Figure \( \PageIndex{4} \).
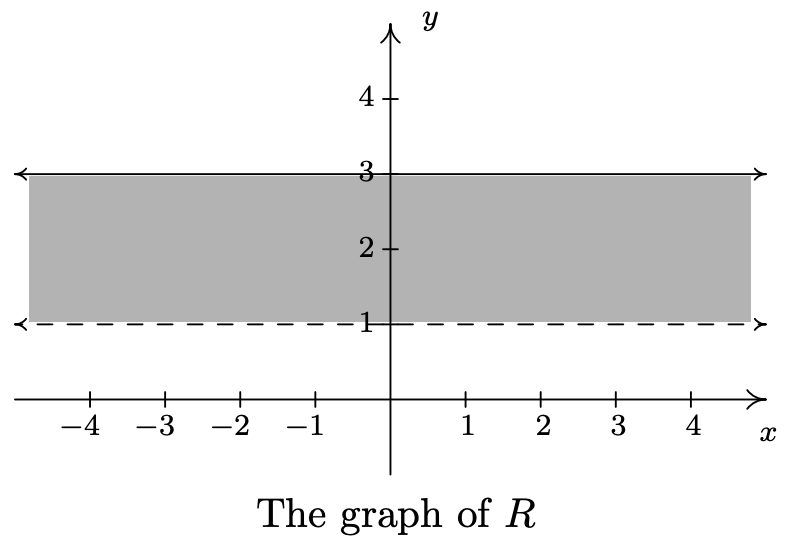
Figure \( \PageIndex{4} \)
The relations \(V\) and \(H\) in the previous example lead us to our final way to describe relations: algebraically. We can more succinctly describe the points in \( V\) as those points which satisfy the equation \( x = 3\). You have seen equations like this before. Depending on the context, \( x = 3\) could mean we have solved an equation for \(x\) and arrived at the solution \(x = 3\). In this case, however, \( x = 3\) describes a set of points in the plane whose \( x \)-coordinate is \( 3 \). Similarly, the relation \( H\) above can be described by the equation \(y = −2\). At some point in your mathematical upbringing, you learned the following.
The graph of the equation \(x = a\) is a vertical line through \( (a, 0)\), and the graph of the equation \( y = b\) is a horizontal line through \( (0, b)\).
Given that the elementary equations \( x = a\) and \( y = b\) produced lines, it's natural to wonder what shapes other equations might yield. Thus, our next objective is to study the graphs of equations in a more general setting as we continue to unite Algebra and Geometry.
Graphs of Equations
In this section, we delve more deeply into the connection between Algebra and Geometry by focusing on graphing relations described by equations. The main idea of this section is the following.
The graph of an equation is the set of points that satisfy the equation. That is, a point \((a, b)\) is on the graph of an equation if and only if \(a\) and \(b\) satisfy the equation.
Here, "\(a\) and \(b\) satisfy the equation" means "\(a\) and \(b\) make the equation true." At this point, we gain some insight into the word "relation." If the equation to be graphed contains both \(x\) and \(y\), then the equation relates the two variables. More specifically, in the next two examples, we consider the graph of the equation \(x^{2}+y^{3}=1\). Even though it is not specifically spelled out, what we are doing is graphing the relation \(R=\left\{(x, y) \mid x^{2}+y^{3}=1\right\}\). The points \((x, y)\) we graph belong to the relation \(R\) and are necessarily related by the equation \(x^{2}+y^{3}=1\), since it is those pairs of \(x\) and \(y\) which make the equation true.
Determine whether or not \((2, −1)\) is on the graph of \(x^{2}+y^{3}=1\).
- Solution
-
We substitute \(x = 2\) and \(y = −1\) into the equation to see if the equation is satisfied.\[\begin{array}{rrcl}
& (2)^{2}+(-1)^{3} & \overset{?}{=} & 1 \\
\implies & 3 & \neq & 1 \\
\end{array}\nonumber\]Hence, \((2, −1)\) is not on the graph of \(x^{2}+y^{3}=1\).
We could spend hours randomly guessing and checking to see if points are on the graph of the equation. A more systematic approach is outlined in the following example.
Graph \(x^{2}+y^{3}=1\).
- Solution
-
To efficiently generate points on the graph of this equation, we first solve for \(y\).\[\begin{array}{rrcl}
& x^{2}+y^{3} & = & 1 \\
\implies & y^{3} &= & 1-x^{2} \\
\implies & \sqrt[3]{y^{3}} & = &\sqrt[3]{1-x^{2}} \\
\implies & y & = & \sqrt[3]{1-x^{2}} \\
\end{array}\nonumber\]We now substitute a value in for \(x\), determine the corresponding value \(y\), and plot the resulting point \((x, y)\). For example, substituting \(x = −3\) into the equation yields\[y=\sqrt[3]{1-x^{2}}=\sqrt[3]{1-(-3)^{2}}=\sqrt[3]{-8}=-2,\nonumber\]so the point \((−3, −2)\) is on the graph. Continuing in this manner, we generate a table of points on the equation's graph. These points are then plotted in the plane as shown below.
Remember, these points constitute only a small sampling of the points on this equation's graph. To get a better idea of the graph's shape, we could plot more points until we feel comfortable "connecting the dots." Doing so would result in a curve similar to the one pictured below.

Don't worry if you don't get all of the little bends and curves just right − Calculus is where the art of precise graphing takes center stage. For now, we will settle with our naive "plug and plot" approach to graphing (until we start talking about transformations later on). If you feel like all of this tedious computation and plotting is beneath you, then you can use graphing technology, input the formula as shown above, and graph; however, while this is fine for some graphs, for others, you will be expected to graph by hand (without using technology).
While we allowed ourselves the opportunity to make a table of values and plot points to graph the relation in Example \( \PageIndex{3} \), we will quickly shed this approach for a more sophisticated approach. Outside of this chapter, the reader should not rely on building a table of values to graph relations.
Of all of the points on the graph of an equation, the places where the graph crosses or touches the axes hold special significance. These are called the intercepts of the graph. Intercepts come in two distinct varieties: \( x \)-intercepts and \( y \)-intercepts. They are defined below.
Suppose the graph of an equation is given.
- A point on a graph also on the \( x \)-axis is called an \( x \)-intercept of the graph.
- A point on a graph also on the \( y \)-axis is called a \( y \)-intercept of the graph.
In our previous example the graph had two \( x \)-intercepts, \((−1, 0)\) and \((1, 0)\), and one \( y \)-intercept, \((0, 1)\). The graph of an equation can have any number of intercepts, including none at all! Since \(x\)-intercepts lie on the \(x\)-axis, we can find them by setting \(y = 0\) in the equation. Similarly, since \(y\)-intercepts lie on the \(y\)-axis, we can find them by setting \(x = 0\) in the equation.
Remember that intercepts are points and must be written as ordered pairs.
Another fact you may have noticed about the graph in the previous example is that it seems symmetric about the \(y\)-axis. To prove this analytically, we assume \((x, y)\) is a generic point on the graph of the equation. That is, we assume \(x^{2}+y^{3}=1\) is true. In Section 1.1, we learned the point symmetric to \((x, y)\) about the \(y\)-axis is \((−x, y)\). To show that the graph is symmetric about the \(y\)-axis, we need to show that \((−x, y)\) satisfies the equation \(x^{2}+y^{3}=1\), too. Substituting \((−x, y)\) into the equation gives\[\begin{array}{rrcl}
& (-x)^{2}+(y)^{3} & \overset{?}{=} & 1 \\
\implies & x^{2}+y^{3} & \overset{\checkmark}{=} & 1 \\
\end{array}\nonumber\]Since we are assuming the original equation \(x^{2}+y^{3}=1\) is true, we have shown that \((−x, y)\) satisfies the equation (since it leads to a true result) and hence is on the graph. In this way, we can check whether the graph of a given equation possesses any of the symmetries discussed in Section 1.1. We summarize the procedure in the following result.
To test the graph of an equation for symmetry
- about the \(y\)-axis − substitute \((−x, y)\) into the equation and simplify. If the result is equivalent to the original equation, the graph is symmetric about the \(y\)-axis.
- about the \(x\)-axis – substitute \((x, −y)\) into the equation and simplify. If the result is equivalent to the original equation, the graph is symmetric about the \(x\)-axis.
- about the origin - substitute \((−x, −y)\) into the equation and simplify. If the result is equivalent to the original equation, the graph is symmetric about the origin.
Intercepts and symmetry are two tools that can help us sketch the graph of an equation analytically, as demonstrated in the following example.
Find the \(x\)- and \(y\)-intercepts (if any) of the graph of \((x-2)^{2}+y^{2}=1\). Test for symmetry. Plot additional points as needed to complete the graph.
- Solution
-
To look for \(x\)-intercepts, we set \(y = 0\) and solve\[\begin{array}{rrcl}
& (x-2)^{2}+y^{2} & = & 1 \\
\implies & (x-2)^{2}+0^{2} & = & 1 \\
\implies & (x-2)^{2} & = & 1 \\
\implies & \sqrt{(x-2)^{2}} & = & \sqrt{1} \\
\implies & x - 2 & = & \pm 1 \\
\implies & x & = & 2 \pm 1 \\
\implies & x & = & 3,1 \\
\end{array}\nonumber\]We get two answers for \(x\) which correspond to two \(x\)-intercepts: \((1, 0)\) and \((3, 0)\). Turning our attention to \(y\)-intercepts, we set \(x = 0\) and solve\[\begin{array}{rrcl}
& (x-2)^{2}+y^{2} & = & 1 \\
\implies & (0-2)^{2}+y^{2} & = & 1 \\
\implies & 4+y^{2} & = & 1 \\
\implies & y^{2} & = & -3 \\
\end{array}\nonumber\]Since there is no real number that squares to a negative number, we are forced to conclude that the graph has no \(y\)-intercepts.2Plotting the data we have so far, we get

Moving along to symmetry, we can immediately dismiss the possibility that the graph is symmetric about the \(y\)-axis or the origin. If the graph possessed either of these symmetries, then the fact that \((1, 0)\) is on the graph would mean \((−1, 0)\) would have to be on the graph. Since \((−1, 0)\) would be another \(x\)-intercept (and we've found all of these), the graph can't have \(y\)-axis or origin symmetry. The only symmetry left to test is symmetry about the \(x\)-axis. To that end, we substitute \((x, −y)\) into the equation and simplify\[\begin{array}{rrcl}
& (x-2)^{2}+y^{2} & = & 1\\
\implies & (x-2)^{2}+(-y)^{2} & \overset{?}{=} & 1 \\
\implies & (x-2)^{2}+y^{2} & \overset{\checkmark}{=} & 1 \\
\end{array}\nonumber\]Since we have obtained our original equation, we know the graph is symmetric about the \(x\)-axis. This means we can cut our "plug and plot" time in half: whatever happens below the \(x\)-axis is reflected above the \(x\)-axis, and vice-versa. Proceeding as we did in the previous example, we obtain
A couple of remarks are in order. First, it is possible to choose a value for \(x\) that does not correspond to a point on the graph. For example, in the previous example, if we solve for \(y\) (as is our custom), we get\[y=\pm \sqrt{1-(x-2)^{2}}.\nonumber\]Upon substituting \(x = 0\) into the equation, we would obtain\[y=\pm \sqrt{1-(0-2)^{2}}=\pm \sqrt{1-4}=\pm \sqrt{-3},\nonumber\]which is not a real number. This means there are no points on the graph with an \(x\)-coordinate of \(0\). When this happens, we move on and try another point. This is another drawback of the "plug-and-plot" approach to graphing equations. Luckily, we will devote much of this book to developing techniques that allow us to graph entire families of equations quickly.
Second, it is instructive to show what would have happened had we tested the equation in the last example for symmetry about the \(y\)-axis. Substituting \((−x, y)\) into the equation yields\[\begin{array}{rrcl}
& (x-2)^{2}+y^{2} & = & 1 \\
\implies & (-x-2)^{2}+y^{2} & \overset{?}{=} & 1 \\
\implies & ((-1)(x+2))^{2}+y^{2} & \overset{?}{=} & 1 \\
\implies & (x+2)^{2}+y^{2} & \overset{?}{=} & 1 \\
\end{array}\nonumber\]This last equation does not appear to be equivalent to our original equation. However, to actually prove that the graph is not symmetric about the \(y\)-axis, we need to find a point \((x, y)\) on the graph whose reflection \((−x, y)\) is not. Our \(x\)-intercept \((1, 0)\) fits this bill nicely, since if we substitute \((−1, 0)\) into the equation we get\[\begin{array}{rrcl}
& (x-2)^{2}+y^{2} & \overset{?}{=} & 1\\
\implies & (-1-2)^{2}+0^{2} & \overset{?}{=} & 1 \\
\implies & 9 & \neq 1 \\
\end{array}\nonumber\]This proves that \((−1, 0)\) is not on the graph.
Footnotes
1 Literally impossible! The interested reader is encouraged to research countable versus uncountable sets.
2 It is worthwhile here to mention that the \( x \)- and \( y \)-axes represent real number lines. Thus, you will never be able to plot a coordinate involving imaginary numbers (unless you are working with the complex plane).