
6.3: Derivatives of Other Trigonometric Functions
- Page ID
- 106370

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Preview Video
This optional summary video from the textbook author might be helpful to use as a preview. Other, more detailed, supplemental videos for this section are posted at the end of the text.
Learning Objectives
In this section, we strive to understand the ideas generated by the following important questions:
- What are the derivatives of the tangent, cotangent, secant, and cosecant functions?
- How do the derivatives of \(\tan(x)\), \(\cot(x)\), \(\text{sec}(x)\), and \(\text{csc}(x)\) combine with other derivative rules we have developed to expand the library of functions we can quickly differentiate?
One of the powerful themes in trigonometry is that the entire subject emanates from a very simple idea: locating a point on the unit circle.
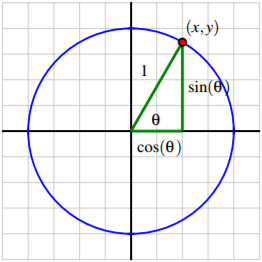
Figure \(\PageIndex{1}\): The unit circle and the definition of the sine and cosine functions.
Because each angle θ corresponds to one and only one point (x, y) on the unit circle, the x- and y-coordinates of this point are each functions of θ. Indeed, this is the very definition of \(\cos (θ)\) and \(\sin (θ)\): \(\cos (θ)\) is the x-coordinate of the point on the unit circle corresponding to the angle θ, and \(\sin (θ)\) is the y-coordinate. From this simple definition, all of trigonometry is founded. For instance, the fundamental trigonometric identity,
\[\sin^2 (θ) + \cos^2 (θ) = 1\]
is a restatement of the Pythagorean Theorem, applied to the right triangle shown in Figure \(\PageIndex{1}\)
We recall as well that there are four other trigonometric functions, each defined in terms of the sine and/or cosine functions. These six trigonometric functions together offer us a wide range of flexibility in problems involving right triangles. The tangent function is defined by
\[\tan(θ) = \dfrac{\sin (θ) }{\cos (θ)},\]
while the cotangent function is its reciprocal:
\[\cot(θ) = \dfrac{\cos (θ)}{\sin (θ)}.\]
The secant function is the reciprocal of the cosine function,
\[\text{sec}(θ) = \dfrac{1}{\cos (θ)} , \]
and the cosecant function is the reciprocal of the sine function,
\[\text{csc}(θ) = \dfrac{1}{\sin (θ)} . \label{scsDef}\]
Because we know the derivatives of the sine and cosine function, and the other four trigonometric functions are defined in terms of these familiar functions, we can now develop shortcut differentiation rules for the tangent, cotangent, secant, and cosecant functions. In this section’s preview activity, we work through the steps to find the derivative of \(y = tan(x)\).
Preview Activity \(\PageIndex{1}\)
Consider the function \(f (x) = tan(x)\), and remember that \(tan(x) = \sin(x) \cos(x)\).
- What is the domain of \(f\)?
- Use the quotient rule to show that one expression for \(f' (x)\) is \[f' (x) = \dfrac{\cos(x) \cos(x) + \sin(x)\sin(x)}{\cos^2(x)}\].
- What is the Fundamental Trigonometric Identity? How can this identity be used to find a simpler form for f' (x)?
- Recall that sec(x) = 1 cos(x) . How can we express \(f' (x)\) in terms of the secant function?
- For what values of x is f' (x) defined? How does this set compare to the domain of f?
Derivatives of the cotangent, secant, and cosecant functions
In Preview Activity 2.4, we found that the derivative of the tangent function can be expressed in several ways, but most simply in terms of the secant function. Next, we develop the derivative of the cotangent function.
Let \(g(x) = cot(x)\). To find \(g' (x)\), we observe that \(g(x) = \cos(x) \sin(x)\) and apply the quotient rule. Hence
\[ \begin{align} g' (x) &= \dfrac{\sin(x)(- \sin(x)) - \cos(x) \cos(x) }{\sin^2 (x)} \\& = - \dfrac{sin^2 (x) + cos^2 (x) }{\sin^2 (x)} \end{align}\]
By the Fundamental Trigonometric Identity, we see that
\[g' (x) = -\dfrac{1}{\sin^2 (x)}\]
recalling Equation \ref{scsDef}, it follows that we can most simply express \(g'\) by the rule
\[g' (x) = - \text{csc}^2 (x).\]
Note that neither \(g\) nor \(g'\) is defined when \(\sin(x) = 0\), which occurs at every integer multiple of \(π\). Hence we have the following rule.
Cotangent Function
For all real numbers x such that \(x \neq kπ\), where \(k = 0, ±1, ±2, \ldots\),
\[\dfrac{d}{dx} [\cot(x)] = - \text{csc}^2 (x).\]
Observe that the shortcut rule for the cotangent function is very similar to the rule we discovered in Preview Activity 2.4 for the tangent function.
Tangent Function
For all real numbers \(x\) such that \(x \neq \dfrac{(2k+1)π}{2}\), where \(k = ±1, ±2, \ldots \),
\[\dfrac{d}{dx} [\tan(x)] = \text{sec}^2 (x).\]
In the next two activities, we develop the rules for differentiating the secant and cosecant functions.
Activity \(\PageIndex{1}\)
Let h(x) = sec(x) and recall that sec(x) = 1 cos(x) .
- What is the domain of h?
- Use the quotient rule to develop a formula for h 0 (x) that is expressed completely in terms of sin(x) and cos(x).
- How can you use other relationships among trigonometric functions to write h 0 (x) only in terms of tan(x) and sec(x)? (d) What is the domain of h 0 ? How does this compare to the domain of h? C 116 Activity 2.11. Let p(x) = csc(x) and recall that csc(x) = 1 sin(x) . (a) What is the domain of p? (b) Use the quotient rule to develop a formula for p 0 (x) that is expressed completely in terms of sin(x) and cos(x). (c) How can you use other relationships among trigonometric functions to write p 0 (x) only in terms of cot(x) and csc(x)?
- What is the domain of p 0 ? How does this compare to the domain of p?
The quotient rule has thus enabled us to determine the derivatives of the tangent, cotangent, secant, and cosecant functions, expanding our overall library of basic functions we can differentiate. Moreover, we observe that just as the derivative of any polynomial function is a polynomial, and the derivative of any exponential function is another exponential function, so it is that the derivative of any basic trigonometric function is another function that consists of basic trigonometric functions. This makes sense because all trigonometric functions are periodic, and hence their derivatives will be periodic, too.
As has been and will continue to be the case throughout our work in Chapter 2, the derivative retains all of its fundamental meaning as an instantaneous rate of change and as the slope of the tangent line to the function under consideration. Our present work primarily expands the list of functions for which we can quickly determine a formula for the derivative. Moreover, with the addition of tan(x), cot(x), sec(x), and csc(x) to our library of basic functions, there are many more functions we can differentiate through the sum, constant multiple, product, and quotient rules.
Activity \(\PageIndex{2}\)
Answer each of the following questions. Where a derivative is requested, be sure to label the derivative function with its name using proper notation.
- Let f (x) = 5 sec(x) - 2 csc(x). Find the slope of the tangent line to f at the point where x = π 3 .
- Let p(z) = z 2 sec(z) - z cot(z). Find the instantaneous rate of change of p at the point where z = π 4 .
- Let h(t) = tan(t) t 2 + 1 - 2e t cos(t). Find h 0 (t).
- Let g(r) = r sec(r) 5 r . Find g' (r).
- When a mass hangs from a spring and is set in motion, the object’s position oscillates in a way that the size of the oscillations decrease. This is usually called 117 a damped oscillation. Suppose that for a particular object, its displacement from equilibrium (where the object sits at rest) is modeled by the function s(t) = 15 sin(t) e t . Assume that s is measured in inches and t in seconds. Sketch a graph of this function for t ≥ 0 to see how it represents the situation described. Then compute ds/dt, state the units on this function, and explain what it tells you about the object’s motion. Finally, compute and interpret s 0 (2).
Summary
In this section, we encountered the following important ideas:
- The derivatives of the other four trigonometric functions are d dx [tan(x)] = sec2 (x), d dx [cot(x)] = - csc2 (x), d dx [sec(x)] = sec(x)tan(x), and d dx [csc(x)] = - csc(x) cot(x). Each derivative exists and is defined on the same domain as the original function. For example, both the tangent function and its derivative are defined for all real numbers x such that x , kπ 2 , where k = ±1, ±2, . . ..
- The above four rules for the derivatives of the tangent, cotangent, secant, and cosecant can be used along with the rules for power functions, exponential functions, and the sine and cosine, as well as the sum, constant multiple, product, and quotient rules, to quickly differentiate a wide range of different functions.
Supplemental video
Homework Exercises 6.3
WeBWorK Problems:
1.
2.
3.
Written Problems:
1. Find the equation of the tangent line to the curve \(y=3tan(x)\) at the point \((\frac{pi}{4}, 3)\). You may leave your answer in point slope form without simplifying to \(y=mx+b\).
2. An object moving vertically has its height at time t (measured in feet, with time in seconds) given by the function \(h(t)=3+\frac{2cos(t)}{1.2^t}\).
a. What is a function that describes the object's instantaneous velocity at any time?
b. Find the approximate (to two decimal places) instantaneous velocity of the object at t = 2 and at t = 2.1
c. Describe in everyday language the behaviour of the object at the instant t = 2. Make sure to include the speed, direction, and whether it is slowing down or speeding up. It might be helpful to look at the graph of h(t) at t = 2. Also note what the sign of the second derivative of h(t) should be.