
11.2: Vectors in Space
- Page ID
- 8620
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Learning Objectives
- Describe three-dimensional space mathematically.
- Locate points in space using coordinates.
- Write the distance formula in three dimensions.
- Write the equations for simple planes and spheres.
- Perform vector operations in \(\mathbb{R}^{3}\).
Vectors are useful tools for solving two-dimensional problems. Life, however, happens in three dimensions. To expand the use of vectors to more realistic applications, it is necessary to create a framework for describing three-dimensional space. For example, although a two-dimensional map is a useful tool for navigating from one place to another, in some cases the topography of the land is important. Does your planned route go through the mountains? Do you have to cross a river? To appreciate fully the impact of these geographic features, you must use three dimensions. This section presents a natural extension of the two-dimensional Cartesian coordinate plane into three dimensions.
Three-Dimensional Coordinate Systems
As we have learned, the two-dimensional rectangular coordinate system contains two perpendicular axes: the horizontal \(x\)-axis and the vertical \(y\)-axis. We can add a third dimension, the \(z\)-axis, which is perpendicular to both the \(x\)-axis and the \(y\)-axis. We call this system the three-dimensional rectangular coordinate system. It represents the three dimensions we encounter in real life.
Definition: Three-dimensional Rectangular Coordinate System
The three-dimensional rectangular coordinate system consists of three perpendicular axes: the \(x\)-axis, the \(y\)-axis, and the \(z\)-axis. Because each axis is a number line representing all real numbers in \(ℝ\), the three-dimensional system is often denoted by \(ℝ^3\).
In Figure \(\PageIndex{1a}\), the positive \(z\)-axis is shown above the plane containing the \(x\)- and \(y\)-axes. The positive \(x\)-axis appears to the left and the positive \(y\)-axis is to the right. A natural question to ask is: How was this arrangement determined? The system displayed follows the right-hand rule. If we take our right hand and align the fingers with the positive \(x\)-axis, then curl the fingers so they point in the direction of the positive \(y\)-axis, our thumb points in the direction of the positive \(z\)-axis (Figure \(\PageIndex{1b}\)). In this text, we always work with coordinate systems set up in accordance with the right-hand rule. Some systems do follow a left-hand rule, but the right-hand rule is considered the standard representation.
In two dimensions, we describe a point in the plane with the coordinates \((x,y)\). Each coordinate describes how the point aligns with the corresponding axis. In three dimensions, a new coordinate, \(z\), is appended to indicate alignment with the \(z\)-axis: \((x,y,z)\). A point in space is identified by all three coordinates (Figure \(\PageIndex{2}\)). To plot the point \((x,y,z)\), go \(x\) units along the \(x\)-axis, then \(y\) units in the direction of the \(y\)-axis, then \(z\) units in the direction of the \(z\)-axis.
Example \(\PageIndex{1}\): Locating Points in Space
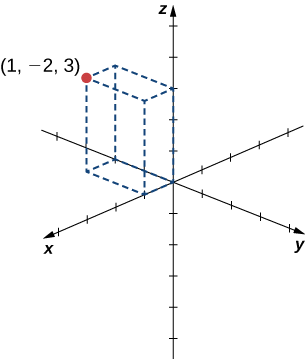
Sketch the point \((1,−2,3)\) in three-dimensional space.
Solution
To sketch a point, start by sketching three sides of a rectangular prism along the coordinate axes: one unit in the positive \(x\) direction, \(2\) units in the negative \(y\) direction, and \(3\) units in the positive \(z\) direction. Complete the prism to plot the point (Figure \(\PageIndex{3}\)).
Exercise \(\PageIndex{1}\)
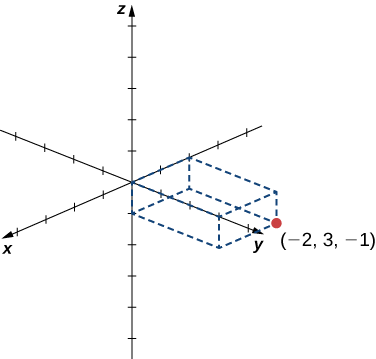
Sketch the point \((−2,3,−1)\) in three-dimensional space.
- Hint
-
Start by sketching the coordinate axes. e.g., Figure \(\PageIndex{3}\). Then sketch a rectangular prism to help find the point in space.
- Answer
-
In two-dimensional space, the coordinate plane is defined by a pair of perpendicular axes. These axes allow us to name any location within the plane. In three dimensions, we define coordinate planes by the coordinate axes, just as in two dimensions. There are three axes now, so there are three intersecting pairs of axes. Each pair of axes forms a coordinate plane: the \(xy\)-plane, the \(xz\)-plane, and the \(yz\)-plane (Figure \(\PageIndex{4}\)). We define the \(xy\)-plane formally as the following set: \(\{(x,y,0):x,y∈ℝ\}.\) Similarly, the \(xz\)-plane and the \(yz\)-plane are defined as \(\{(x,0,z):x,z∈ℝ\}\) and \(\{(0,y,z):y,z∈ℝ\},\) respectively.
To visualize this, imagine you’re building a house and are standing in a room with only two of the four walls finished. (Assume the two finished walls are adjacent to each other.) If you stand with your back to the corner where the two finished walls meet, facing out into the room, the floor is the \(xy\)-plane, the wall to your right is the \(xz\)-plane, and the wall to your left is the \(yz\)-plane.
In two dimensions, the coordinate axes partition the plane into four quadrants. Similarly, the coordinate planes divide space between them into eight regions about the origin, called octants. The octants fill \(ℝ^3\) in the same way that quadrants fill \(ℝ^2\), as shown in Figure \(\PageIndex{5}\).
Most work in three-dimensional space is a comfortable extension of the corresponding concepts in two dimensions. In this section, we use our knowledge of circles to describe spheres, then we expand our understanding of vectors to three dimensions. To accomplish these goals, we begin by adapting the distance formula to three-dimensional space.
If two points lie in the same coordinate plane, then it is straightforward to calculate the distance between them. We know that the distance \(d\) between two points \((x_1,y_1)\) and \((x_2,y_2)\) in the \(xy\)-coordinate plane is given by the formula
\[d=\sqrt{(x_2−x_1)^2+(y_2−y_1)^2}.\]
The formula for the distance between two points in space is a natural extension of this formula.
The Distance between Two Points in Space
The distance \(d\) between points \((x_1,y_1,z_1)\) and \((x_2,y_2,z_2)\) is given by the formula
\[d=\sqrt{(x_2−x_1)^2+(y_2−y_1)^2+(z_2−z_1)^2}. \label{distanceForm}\]
The proof of this theorem is left as an exercise. (Hint: First find the distance \(d_1\) between the points \((x_1,y_1,z_1)\) and \((x_2,y_2,z_1)\) as shown in Figure \(\PageIndex{6}\).)
Example \(\PageIndex{2}\): Distance in Space
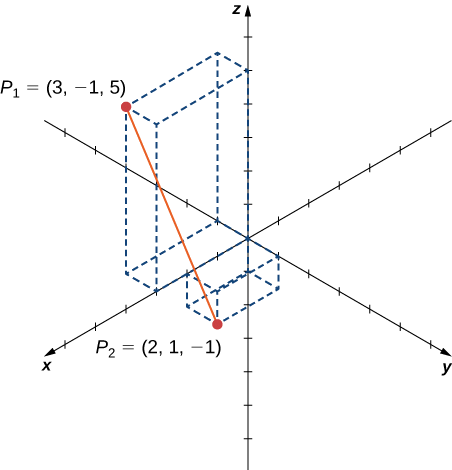
Find the distance between points \(P_1=(3,−1,5)\) and \(P_2=(2,1,−1).\)
Solution
Substitute values directly into the distance formula (Equation \ref{distanceForm}):
\[\begin{align*} d(P_1,P_2) &=\sqrt{(x_2−x_1)^2+(y_2−y_1)^2+(z_2−z_1)^2} \\[4pt] &=\sqrt{(2−3)^2+(1−(−1))^2+(−1−5)^2} \\[4pt] &=\sqrt{(-1)^2+2^2+(−6)^2} \\[4pt] &=\sqrt{41}. \end{align*}\]
Exercise \(\PageIndex{2}\)
Find the distance between points \(P_1=(1,−5,4)\) and \(P_2=(4,−1,−1)\).
- Hint
-
\(d=\sqrt{(x_2−x_1)^2+(y_2−y_1)^2+(z_2−z_1)^2}\)
- Answer
-
\(5\sqrt{2}\)
Before moving on to the next section, let’s get a feel for how \(ℝ^3\) differs from \(ℝ^2\). For example, in \(ℝ^2\), lines that are not parallel must always intersect. This is not the case in \(ℝ^3\). For example, consider the lines shown in Figure \(\PageIndex{8}\). These two lines are not parallel, nor do they intersect.
Figure \(\PageIndex{8}\): These two lines are not parallel, but still do not intersect.
You can also have circles that are interconnected but have no points in common, as in Figure \(\PageIndex{9}\).
Figure \(\PageIndex{9}\): These circles are interconnected, but have no points in common.
We have a lot more flexibility working in three dimensions than we do if we stuck with only two dimensions.
Writing Equations in \(ℝ^3\)
Now that we can represent points in space and find the distance between them, we can learn how to write equations of geometric objects such as lines, planes, and curved surfaces in \(ℝ^3\). First, we start with a simple equation. Compare the graphs of the equation \(x=0\) in \(ℝ\), \(ℝ^2\),and \(ℝ^3\) (Figure \(\PageIndex{10}\)). From these graphs, we can see the same equation can describe a point, a line, or a plane.
In space, the equation \(x=0\) describes all points \((0,y,z)\). This equation defines the \(yz\)-plane. Similarly, the \(xy\)-plane contains all points of the form \((x,y,0)\). The equation \(z=0\) defines the \(xy\)-plane and the equation \(y=0\) describes the \(xz\)-plane (Figure \(\PageIndex{11}\)).
Understanding the equations of the coordinate planes allows us to write an equation for any plane that is parallel to one of the coordinate planes. When a plane is parallel to the \(xy\)-plane, for example, the \(z\)-coordinate of each point in the plane has the same constant value. Only the \(x\)- and \(y\)-coordinates of points in that plane vary from point to point.
Equations of Planes Parallel to Coordinate Planes
- The plane in space that is parallel to the \(xy\)-plane and contains point \((a,b,c)\) can be represented by the equation \(z=c\).
- The plane in space that is parallel to the \(xz\)-plane and contains point \((a,b,c)\) can be represented by the equation \(y=b\).
- The plane in space that is parallel to the \(yz\)-plane and contains point \((a,b,c)\) can be represented by the equation \(x=a\).
Example \(\PageIndex{3}\): Writing Equations of Planes Parallel to Coordinate Planes
- Write an equation of the plane passing through point \((3,11,7)\) that is parallel to the \(yz\)-plane.
- Find an equation of the plane passing through points \((6,−2,9), (0,−2,4),\) and \((1,−2,−3).\)
Solution
- When a plane is parallel to the \(yz\)-plane, only the \(y\)- and \(z\)-coordinates may vary. The \(x\)-coordinate has the same constant value for all points in this plane, so this plane can be represented by the equation \(x=3\).
- Each of the points \((6,−2,9), (0,−2,4),\) and \((1,−2,−3)\) has the same \(y\)-coordinate. This plane can be represented by the equation \(y=−2\).
Exercise \(\PageIndex{3}\)
Write an equation of the plane passing through point \((1,−6,−4)\) that is parallel to the \(xy\)-plane.
- Hint
-
If a plane is parallel to the \(xy\)-plane, the z-coordinates of the points in that plane do not vary.
- Answer
-
\(z=−4\)
As we have seen, in \(ℝ^2\) the equation \(x=5\) describes the vertical line passing through point \((5,0)\). This line is parallel to the \(y\)-axis. In a natural extension, the equation \(x=5\) in \(ℝ^3\) describes the plane passing through point \((5,0,0)\), which is parallel to the \(yz\)-plane. Another natural extension of a familiar equation is found in the equation of a sphere.
Definition: Sphere
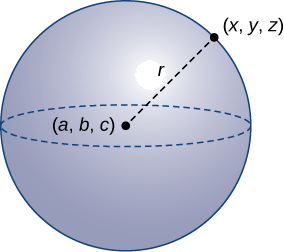
A sphere is the set of all points in space equidistant from a fixed point, the center of the sphere (Figure \(\PageIndex{12}\)), just as the set of all points in a plane that are equidistant from the center represents a circle. In a sphere, as in a circle, the distance from the center to a point on the sphere is called the radius.
The equation of a circle is derived using the distance formula in two dimensions. In the same way, the equation of a sphere is based on the three-dimensional formula for distance.
Standard Equation of a Sphere
The sphere with center \((a,b,c)\) and radius \(r\) can be represented by the equation
\[(x−a)^2+(y−b)^2+(z−c)^2=r^2.\]
This equation is known as the standard equation of a sphere.
Example \(\PageIndex{4}\): Finding an Equation of a Sphere
Find the standard equation of the sphere with center \((10,7,4)\) and point \((−1,3,−2)\), as shown in Figure \(\PageIndex{13}\).
Figure \(\PageIndex{13}\): The sphere centered at \((10,7,4)\) containing point \((−1,3,−2).\)
Solution
Use the distance formula to find the radius \(r\) of the sphere:
\[\begin{align*} r &=\sqrt{(−1−10)^2+(3−7)^2+(−2−4)^2} \\[4pt] &=\sqrt{(−11)^2+(−4)^2+(−6)^2} \\[4pt] &=\sqrt{173} \end{align*} \]
The standard equation of the sphere is
\[(x−10)^2+(y−7)^2+(z−4)^2=173. \nonumber\]
Exercise \(\PageIndex{4}\)
Find the standard equation of the sphere with center \((−2,4,−5)\) containing point \((4,4,−1).\)
- Hint
-
First use the distance formula to find the radius of the sphere.
- Answer
-
\[(x+2)^2+(y−4)^2+(z+5)^2=52 \nonumber\]
Example \(\PageIndex{5}\): Finding the Equation of a Sphere
Let \(P=(−5,2,3)\) and \(Q=(3,4,−1)\), and suppose line segment \(\overline{PQ}\) forms the diameter of a sphere (Figure \(\PageIndex{14}\)). Find the equation of the sphere.
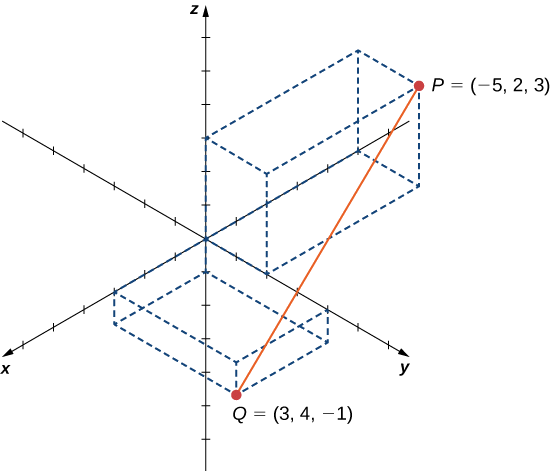
Solution:
Since \(\overline{PQ}\) is a diameter of the sphere, we know the center of the sphere is the midpoint of \(\overline{PQ}\).Then,
\[C=\left(\dfrac{−5+3}{2},\dfrac{2+4}{2},\dfrac{3+(−1)}{2}\right)=(−1,3,1). \nonumber\]
Furthermore, we know the radius of the sphere is half the length of the diameter. This gives
\[\begin{align*} r &=\dfrac{1}{2}\sqrt{(−5−3)^2+(2−4)^2+(3−(−1))^2} \\[4pt] &=\dfrac{1}{2}\sqrt{64+4+16} \\[4pt] &=\sqrt{21} \end{align*}\]
Then, the equation of the sphere is \((x+1)^2+(y−3)^2+(z−1)^2=21.\)
Exercise \(\PageIndex{5}\)
Find the equation of the sphere with diameter \(\overline{PQ}\), where \(P=(2,−1,−3)\) and \(Q=(−2,5,−1).\)
- Hint
-
Find the midpoint of the diameter first.
- Answer
-
\[x^2+(y−2)^2+(z+2)^2=14 \nonumber\]
Example \(\PageIndex{6}\): Graphing Other Equations in Three Dimensions
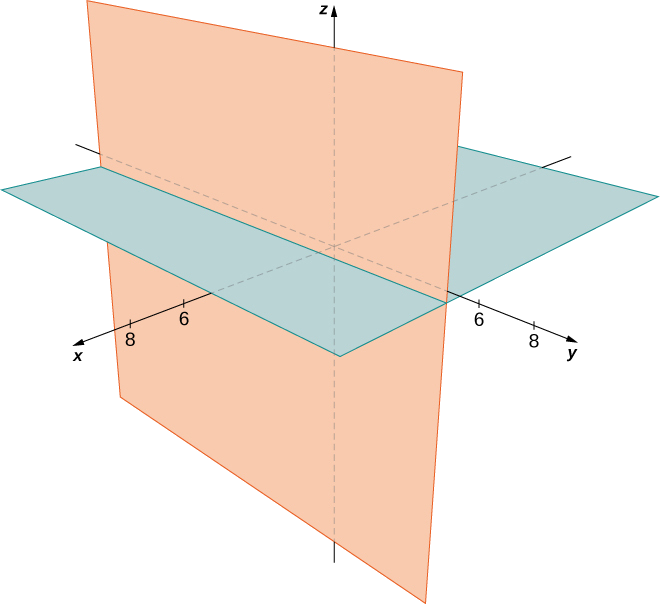
Describe the set of points that satisfies \((x−4)(z−2)=0,\) and graph the set.
Solution
We must have either \(x−4=0\) or \(z−2=0\), so the set of points forms the two planes \(x=4\) and \(z=2\) (Figure \(\PageIndex{15}\)).
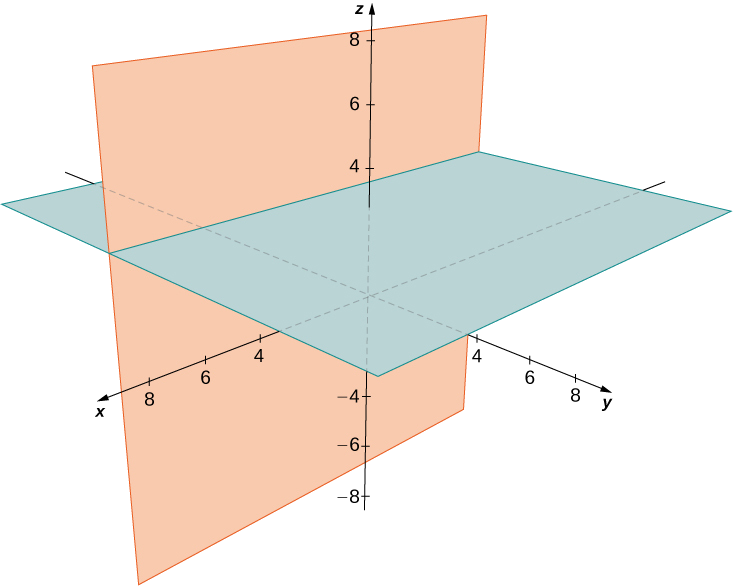
Exercise \(\PageIndex{6}\)
Describe the set of points that satisfies \((y+2)(z−3)=0,\) and graph the set.
- Hint
-
One of the factors must be zero.
- Answer
-
The set of points forms the two planes \(y=−2\) and \(z=3\).
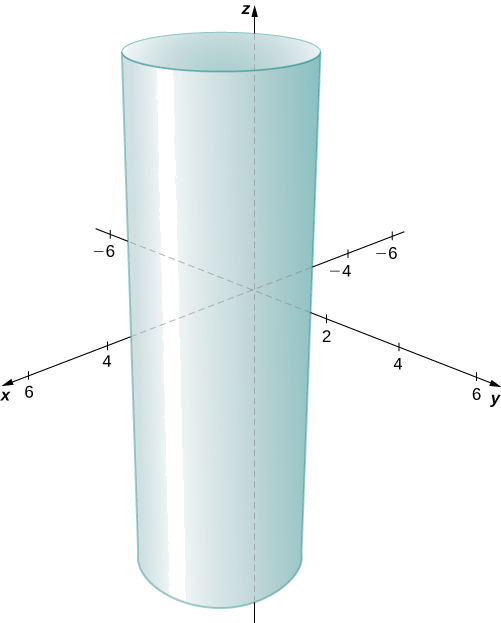
Example \(\PageIndex{7}\): Graphing Other Equations in Three Dimensions
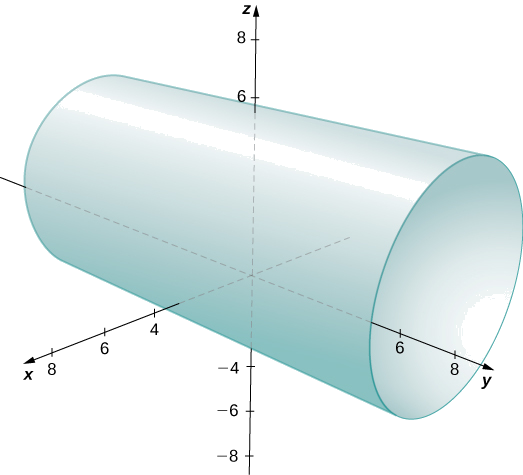
Describe the set of points in three-dimensional space that satisfies \((x−2)^2+(y−1)^2=4,\) and graph the set.
Solution
The \(x\)- and \(y\)-coordinates form a circle in the \(xy\)-plane of radius \(2\), centered at \((2,1)\). Since there is no restriction on the \(z\)-coordinate, the three-dimensional result is a circular cylinder of radius \(2\) centered on the line with \(x=2\) and \(y=1\). The cylinder extends indefinitely in the \(z\)-direction (Figure \(\PageIndex{16}\)).
Exercise \(\PageIndex{7}\)
Describe the set of points in three dimensional space that satisfies \(x^2+(z−2)^2=16\), and graph the surface.
- Hint
-
Think about what happens if you plot this equation in two dimensions in the \(xz\)-plane.
- Answer
-
A cylinder of radius 4 centered on the line with \(x=0\) and \(z=2\).
Working with Vectors in \(ℝ^3\)
Just like two-dimensional vectors, three-dimensional vectors are quantities with both magnitude and direction, and they are represented by directed line segments (arrows). With a three-dimensional vector, we use a three-dimensional arrow.
Three-dimensional vectors can also be represented in component form. The notation \(\vecs{v}=⟨x,y,z⟩\) is a natural extension of the two-dimensional case, representing a vector with the initial point at the origin, \((0,0,0)\), and terminal point \((x,y,z)\). The zero vector is \(\vecs{0}=⟨0,0,0⟩\). So, for example, the three dimensional vector \(\vecs{v}=⟨2,4,1⟩\) is represented by a directed line segment from point \((0,0,0)\) to point \((2,4,1)\) (Figure \(\PageIndex{17}\)).
Vector addition and scalar multiplication are defined analogously to the two-dimensional case. If \(\vecs{v}=⟨x_1,y_1,z_1⟩\) and \(\vecs{w}=⟨x_2,y_2,z_2⟩\) are vectors, and \(k\) is a scalar, then
\[\vecs{v}+\vecs{w}=⟨x_1+x_2,y_1+y_2,z_1+z_2⟩\]
and
\[k\vecs{v}=⟨kx_1,ky_1,kz_1⟩.\]
If \(k=−1,\) then \(k\vecs{v}=(−1)\vecs{v}\) is written as \(−\vecs{v}\), and vector subtraction is defined by \(\vecs{v}−\vecs{w}=\vecs{v}+(−\vecs{w})=\vecs{v}+(−1)\vecs{w}\).
The standard unit vectors extend easily into three dimensions as well, \(\hat{\mathbf i}=⟨1,0,0⟩\), \(\hat{\mathbf j}=⟨0,1,0⟩\), and \(\hat{\mathbf k}=⟨0,0,1⟩\), and we use them in the same way we used the standard unit vectors in two dimensions. Thus, we can represent a vector in \(ℝ^3\) in the following ways:
\[\vecs{v}=⟨x,y,z⟩=x\hat{\mathbf i}+y\hat{\mathbf j}+z\hat{\mathbf k}\].
Example \(\PageIndex{8}\): Vector Representations
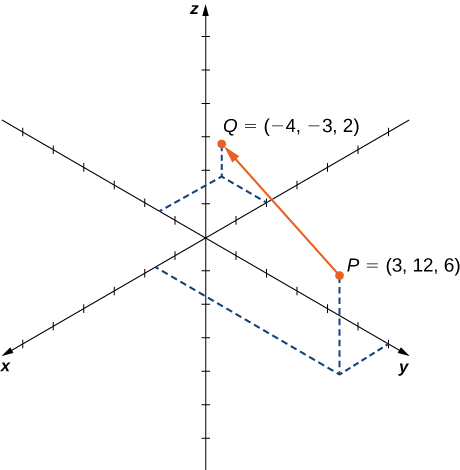
Let \(\vecd{PQ}\) be the vector with initial point \(P=(3,12,6)\) and terminal point \(Q=(−4,−3,2)\) as shown in Figure \(\PageIndex{18}\). Express \(\vecd{PQ}\) in both component form and using standard unit vectors.
Solution
In component form,
\[\begin{align*} \vecd{PQ} =⟨x_2−x_1,y_2−y_1,z_2−z_1⟩ \\[4pt] =⟨−4−3,−3−12,2−6⟩ \\[4pt] =⟨−7,−15,−4⟩. \end{align*}\]
In standard unit form,
\[\vecd{PQ}=−7\hat{\mathbf i}−15\hat{\mathbf j}−4\hat{\mathbf k}. \nonumber\]
Exercise \(\PageIndex{8}\)
Let \(S=(3,8,2)\) and \(T=(2,−1,3)\). Express \(\vec{ST}\) in component form and in standard unit form.
- Hint
-
Write \(\vecd{ST}\) in component form first. \(T\) is the terminal point of \(\vecd{ST}\).
- Answer
-
\(\vecd{ST}=⟨−1,−9,1⟩=−\hat{\mathbf i}−9\hat{\mathbf j}+\hat{\mathbf k}\)
As described earlier, vectors in three dimensions behave in the same way as vectors in a plane. The geometric interpretation of vector addition, for example, is the same in both two- and three-dimensional space (Figure \(\PageIndex{19}\)).
We have already seen how some of the algebraic properties of vectors, such as vector addition and scalar multiplication, can be extended to three dimensions. Other properties can be extended in similar fashion. They are summarized here for our reference.
Properties of Vectors in Space
Let \(\vecs{v}=⟨x_1,y_1,z_1⟩\) and \(\vecs{w}=⟨x_2,y_2,z_2⟩\) be vectors, and let \(k\) be a scalar.
- Scalar multiplication: \[k\vecs{v}=⟨kx_1,ky_1,kz_1⟩\]
- Vector addition: \[\vecs{v}+\vecs{w}=⟨x_1,y_1,z_1⟩+⟨x_2,y_2,z_2⟩=⟨x_1+x_2,y_1+y_2,z_1+z_2⟩\]
- Vector subtraction: \[\vecs{v}−\vecs{w}=⟨x_1,y_1,z_1⟩−⟨x_2,y_2,z_2⟩=⟨x_1−x_2,y_1−y_2,z_1−z_2⟩\]
- Vector magnitude: \[\|\vecs{v}\|=\sqrt{x_1^2+y_1^2+z_1^2}\]
- Unit vector in the direction of \(\vecs{v}\): \[\dfrac{1}{\|\vecs{v}\|}\vecs{v}=\dfrac{1}{\|\vecs{v}\|}⟨x_1,y_1,z_1⟩=⟨\dfrac{x_1}{\|\vecs{v}\|},\dfrac{y_1}{\|\vecs{v}\|},\dfrac{z_1}{\|\vecs{v}\|}⟩, \quad \text{if} \, \vecs{v}≠\vecs{0}\]
We have seen that vector addition in two dimensions satisfies the commutative, associative, and additive inverse properties. These properties of vector operations are valid for three-dimensional vectors as well. Scalar multiplication of vectors satisfies the distributive property, and the zero vector acts as an additive identity. The proofs to verify these properties in three dimensions are straightforward extensions of the proofs in two dimensions.
Example \(\PageIndex{9}\): Vector Operations in Three Dimensions
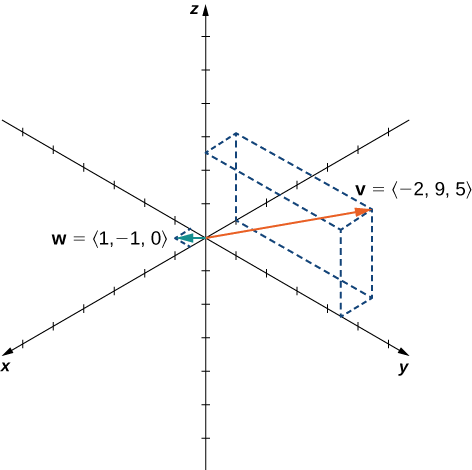
Let \(\vecs{v}=⟨−2,9,5⟩\) and \(\vecs{w}=⟨1,−1,0⟩\) (Figure \(\PageIndex{20}\)). Find the following vectors.
- \(3\vecs{v}−2\vecs{w}\)
- \(5\|\vecs{w}\|\)
- \(\|5 \vecs{w}\|\)
- A unit vector in the direction of \(\vecs{v}\)
Solution
a. First, use scalar multiplication of each vector, then subtract:
\[\begin{align*} 3\vecs{v}−2\vecs{w} =3⟨−2,9,5⟩−2⟨1,−1,0⟩ \\[4pt] =⟨−6,27,15⟩−⟨2,−2,0⟩ \\[4pt] =⟨−6−2,27−(−2),15−0⟩ \\[4pt] =⟨−8,29,15⟩. \end{align*}\]
b. Write the equation for the magnitude of the vector, then use scalar multiplication:
\[5\|\vecs{w}\|=5\sqrt{1^2+(−1)^2+0^2}=5\sqrt{2}. \nonumber\]
c. First, use scalar multiplication, then find the magnitude of the new vector. Note that the result is the same as for part b.:
\[\|5 \vecs{w}\|=∥⟨5,−5,0⟩∥=\sqrt{5^2+(−5)^2+0^2}=\sqrt{50}=5\sqrt{2} \nonumber\]
d. Recall that to find a unit vector in two dimensions, we divide a vector by its magnitude. The procedure is the same in three dimensions:
\[\begin{align*} \dfrac{\vecs{v}}{\|\vecs{v}\|} =\dfrac{1}{\|\vecs{v}\|}⟨−2,9,5⟩ \\[4pt] =\dfrac{1}{\sqrt{(−2)^2+9^2+5^2}}⟨−2,9,5⟩ \\[4pt] =\dfrac{1}{\sqrt{110}}⟨−2,9,5⟩ \\[4pt] =⟨\dfrac{−2}{\sqrt{110}},\dfrac{9}{\sqrt{110}},\dfrac{5}{\sqrt{110}}⟩ . \end{align*}\]
Exercise \(\PageIndex{9}\):
Let \(\vecs{v}=⟨−1,−1,1⟩\) and \(\vecs{w}=⟨2,0,1⟩\). Find a unit vector in the direction of \(5\vecs{v}+3\vecs{w}.\)
- Hint
-
Start by writing \(5\vecs{v}+3\vecs{w}\) in component form.
- Answer
-
\(⟨\dfrac{1}{3\sqrt{10}},−\dfrac{5}{3\sqrt{10}},\dfrac{8}{3\sqrt{10}}⟩\)
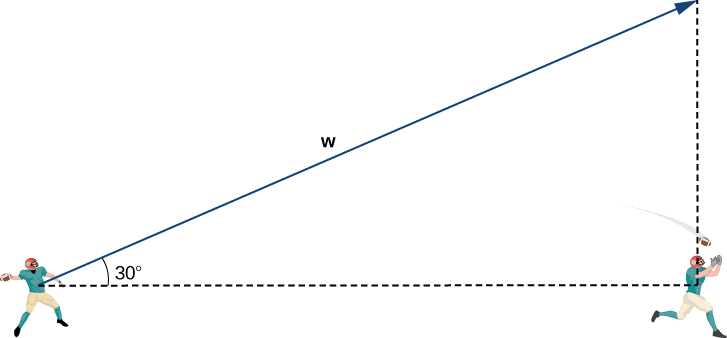
Example \(\PageIndex{10}\): Throwing a Forward Pass
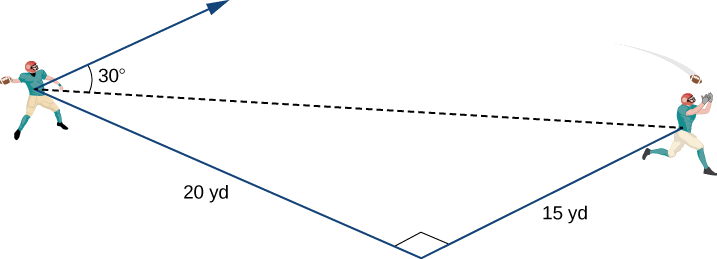
A quarterback is standing on the football field preparing to throw a pass. His receiver is standing 20 yd down the field and 15 yd to the quarterback’s left. The quarterback throws the ball at a velocity of 60 mph toward the receiver at an upward angle of \(30°\) (see the following figure). Write the initial velocity vector of the ball, \(\vecs{v}\), in component form.
Solution
The first thing we want to do is find a vector in the same direction as the velocity vector of the ball. We then scale the vector appropriately so that it has the right magnitude. Consider the vector \(\vecs{w}\) extending from the quarterback’s arm to a point directly above the receiver’s head at an angle of \(30°\) (see the following figure). This vector would have the same direction as \(\vecs{v}\), but it may not have the right magnitude.
The receiver is 20 yd down the field and 15 yd to the quarterback’s left. Therefore, the straight-line distance from the quarterback to the receiver is
Dist from QB to receiver \(=\sqrt{15^2+20^2}=\sqrt{225+400}=\sqrt{625}=25\) yd.
We have \(\dfrac{25}{\|\vecs{w}\|}=\cos 30°.\) Then the magnitude of \(\vecs{w}\) is given by
\(\|\vecs{w}\|=\dfrac{25}{\cos 30°}=\dfrac{25⋅2}{\sqrt{3}}=\dfrac{50}{\sqrt{3}}\) yd
and the vertical distance from the receiver to the terminal point of \(\vecs{w}\) is
Vert dist from receiver to terminal point of \(\vecs{w}=\|\vecs{w}\| \sin 30°=\dfrac{50}{\sqrt{3}}⋅\dfrac{1}{2}=\dfrac{25}{\sqrt{3}}\) yd.
Then \(\vecs{w}=⟨20,15,\dfrac{25}{\sqrt{3}}⟩\), and has the same direction as \(\vecs{v}\).
Recall, though, that we calculated the magnitude of \(\vecs{w}\) to be \(\|\vecs{w}\|=\dfrac{50}{\sqrt{3}}\) yd, and \(\vecs{v}\) has magnitude \(60\) mph. So, we need to multiply vector \(\vecs{w}\) by an appropriate constant, \(k\). We want to find a value of \(k\) so that \(∥k\vecs{w}∥=60\) mph*. We have
\(\|k \vecs{w}\|=k\|\vecs{w}\|=k\dfrac{50}{\sqrt{3}}\) yd,
so we want
\(k \left(\dfrac{50}{\sqrt{3}}\text{ yd}\right) =60\) mph
\(k=\dfrac{60\sqrt{3}}{50}\) mph / yd
\(k=\dfrac{6\sqrt{3}}{5}\) mph / yd.
Then
\(\vecs{v}=k\vecs{w}=k⟨20,15,\dfrac{25}{\sqrt{3}}⟩=\dfrac{6\sqrt{3}}{5}\;⟨20,15,\dfrac{25}{\sqrt{3}}⟩=⟨24\sqrt{3},18\sqrt{3},30⟩\).
Let’s double-check that \(\|\vecs{v}\|=60\) mph. We have
\(\|\vecs{v}\|=\sqrt{(24\sqrt{3})^2+(18\sqrt{3})^2+(30)^2}=\sqrt{1728+972+900}=\sqrt{3600}=60\) mph.
So, we have found the correct components for \(\vecs{v}\).
Readers who have been watching the units of measurement may be wondering what exactly is going on at this point: haven't we just mixed yards and miles per hour? We haven't, but the reason is subtle. One way to understand it is to realize that there are really two parallel coordinate systems in this problem: one gives positions down the field, across the field, and up into the air in units of yards; the other gives speeds down the field, across the field, and up into the air in units of miles per hour. The vector \(\vecs{w}\) is calculated in the position coordinate system; vector \(\vecs{v}\) will be in the speed system. Because corresponding axes in each system are parallel, directions in the two systems are also parallel, so the claim that \(\vecs{w}\) and \(\vecs{v}\) point in the same direction is correct. The constant \(k\) that we're looking for is a conversion factor between the magnitudes of these two vectors, converting from the position system to the speed one in the process. And as seen above, our calculation of \(k\) produces the right units for such a conversion, namely miles per hour per yard.
Including these units in the final calculation, we have:
\(\vecs{v}=k\vecs{w}=k⟨20 \text{ yd},15 \text{ yd},\dfrac{25}{\sqrt{3}} \text{ yd}⟩=\left(\dfrac{6\sqrt{3}}{5}\text{ mph/yd} \right)\;\langle 20 \text{ yd},15 \text{ yd},\dfrac{25}{\sqrt{3}} \text{ yd}\rangle=⟨24\sqrt{3} \text{ mph},18\sqrt{3} \text{ mph},30 \text{ mph}⟩\).
For simplicity, we usually do not include units in vector calculations, but it can sometimes be useful to clearly see what is happening.
Exercise \(\PageIndex{10}\)
Assume the quarterback and the receiver are in the same place as in the previous example. This time, however, the quarterback throws the ball at velocity of \(40\) mph and an angle of \(45°\). Write the initial velocity vector of the ball, \(\vecs{v}\), in component form.
- Hint
-
Follow the process used in the previous example.
- Answer
-
\(v=⟨16\sqrt{2},12\sqrt{2},20\sqrt{2}⟩\)
Key Concepts
- The three-dimensional coordinate system is built around a set of three axes that intersect at right angles at a single point, the origin. Ordered triples \((x,y,z)\) are used to describe the location of a point in space.
- The distance \(d\) between points \((x_1,y_1,z_1)\) and \((x_2,y_2,z_2)\) is given by the formula \[d=\sqrt{(x_2−x_1)^2+(y_2−y_1)^2+(z_2−z_1)^2}.\nonumber\]
- In three dimensions, the equations \(x=a,\, y=b,\) and \(z=c\) describe planes that are parallel to the coordinate planes.
- The standard equation of a sphere with center \((a,b,c)\) and radius \(r\) is \[(x−a)^2+(y−b)^2+(z−c)^2=r^2. \nonumber \]
- In three dimensions, as in two, vectors are commonly expressed in component form, \(\vecs v=⟨x,y,z⟩\), or in terms of the standard unit vectors, \(\vecs v= x\,\mathbf{\hat i}+y\,\mathbf{\hat j}+z\,\mathbf{\hat k}.\)
- Properties of vectors in space are a natural extension of the properties for vectors in a plane. Let \(\vecs v=⟨x_1,y_1,z_1⟩\) and \(\vecs w=⟨x_2,y_2,z_2⟩\) be vectors, and let \(k\) be a scalar.
Scalar multiplication:
\[k\vecs{v}=⟨kx_1,ky_1,kz_1⟩ \nonumber\]
Vector addition:
\[\vecs{v}+\vecs{w}=⟨x_1,y_1,z_1⟩+⟨x_2,y_2,z_2⟩=⟨x_1+x_2,y_1+y_2,z_1+z_2⟩ \nonumber\]
Vector subtraction:
\[\vecs{v}−\vecs{w}=⟨x_1,y_1,z_1⟩−⟨x_2,y_2,z_2⟩=⟨x_1−x_2,y_1−y_2,z_1−z_2⟩ \nonumber\]
Vector magnitude:
\[‖\vecs{v}‖=\sqrt{x_1^2+y_1^2+z_1^2} \nonumber\]
Unit vector in the direction of \(\vecs{v}\):
\[\dfrac{\vecs{v}}{‖\vecs{v}‖}=\dfrac{1}{‖\vecs{v}‖}⟨x_1,y_1,z_1⟩=⟨\dfrac{x_1}{‖\vecs{v}‖},\dfrac{y_1}{‖\vecs{v}‖},\dfrac{z_1}{‖\vecs{v}‖}⟩, \; \vecs{v}≠\vecs{0} \nonumber\]
Key Equations
Distance between two points in space:
\[d=\sqrt{(x_2−x_1)^2+(y_2−y_1)^2+(z_2−z_1)^2} \nonumber\]
Sphere with center \((a,b,c)\) and radius \(r\):
\[(x−a)^2+(y−b)^2+(z−c)^2=r^2 \nonumber\]
Glossary
- coordinate plane
- a plane containing two of the three coordinate axes in the three-dimensional coordinate system, named by the axes it contains: the \(xy\)-plane, \(xz\)-plane, or the \(yz\)-plane
- right-hand rule
- a common way to define the orientation of the three-dimensional coordinate system; when the right hand is curved around the \(z\)-axis in such a way that the fingers curl from the positive \(x\)-axis to the positive \(y\)-axis, the thumb points in the direction of the positive \(z\)-axis
- octants
- the eight regions of space created by the coordinate planes
- sphere
- the set of all points equidistant from a given point known as the center
- standard equation of a sphere
- \((x−a)^2+(y−b)^2+(z−c)^2=r^2\) describes a sphere with center \((a,b,c)\) and radius \(r\)
- three-dimensional rectangular coordinate system
- a coordinate system defined by three lines that intersect at right angles; every point in space is described by an ordered triple \((x,y,z)\) that plots its location relative to the defining axes
Contributors
Gilbert Strang (MIT) and Edwin “Jed” Herman (Harvey Mudd) with many contributing authors. This content by OpenStax is licensed with a CC-BY-SA-NC 4.0 license. Download for free at http://cnx.org.
Example \(\PageIndex{10}\) has been modified by Doug Baldwin and Paul Seeburger to clarify the units of measurement that it uses and how it uses them.
Paul Seeburger also created dynamic versions of Figures \(\PageIndex{8}, \PageIndex{9}\) and \(\PageIndex{13}\) using CalcPlot3D.