
7.5: Linear Stability Analysis of Nonlinear Dynamical Systems
- Page ID
- 7807

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Finally, we can apply linear stability analysis to continuous-time nonlinear dynamical systems. Consider the dynamics of a nonlinear differential equation
\[\frac{dx}{dt} =F(x) \label{(7.64)} \]
around its equilibrium point \(x_{eq}\). By definition, \(x_{eq}\) satisfies
\[0=F(x_{eq}). \label{(7.65)} \]
To analyze the stability of the system around this equilibrium point, we do the same coordinate switch as we did for discrete-time models. Specifically, we apply the following replacement
\[x(t) \Rightarrow x_{eq}+\Delta{x(t)} \label{(7.66)} \]
to Equation \ref{(7.64)}, to obtain
\[\frac{d(x_{eq}+\Delta{x})}{dt} =\frac{d\Delta{x}}{dt} =F(x_{eq}+\Delta{x}) \label{(7.67)} \]
Now that we know the nonlinear function \(F\) on the right hand side can be approximated using the \(Jacobian \ matrix\), the equation above is approximated as
\[\frac{d\Delta{x}}{dt} \approx F(x_{eq})+J\Delta{x}, \label{(7.68)} \]
where \(J\) is the Jacobian matrix of \(F\) at \(x = x_{eq}\) (if you forgot what the Jacobian matrix was, see Eq. (5.7.18)). By combining the result above with Equation \ref{(7.65)}, we obtain
\[\frac{d\Delta{x}}{dt} \approx J\Delta{x} \label{(7.69)} \]
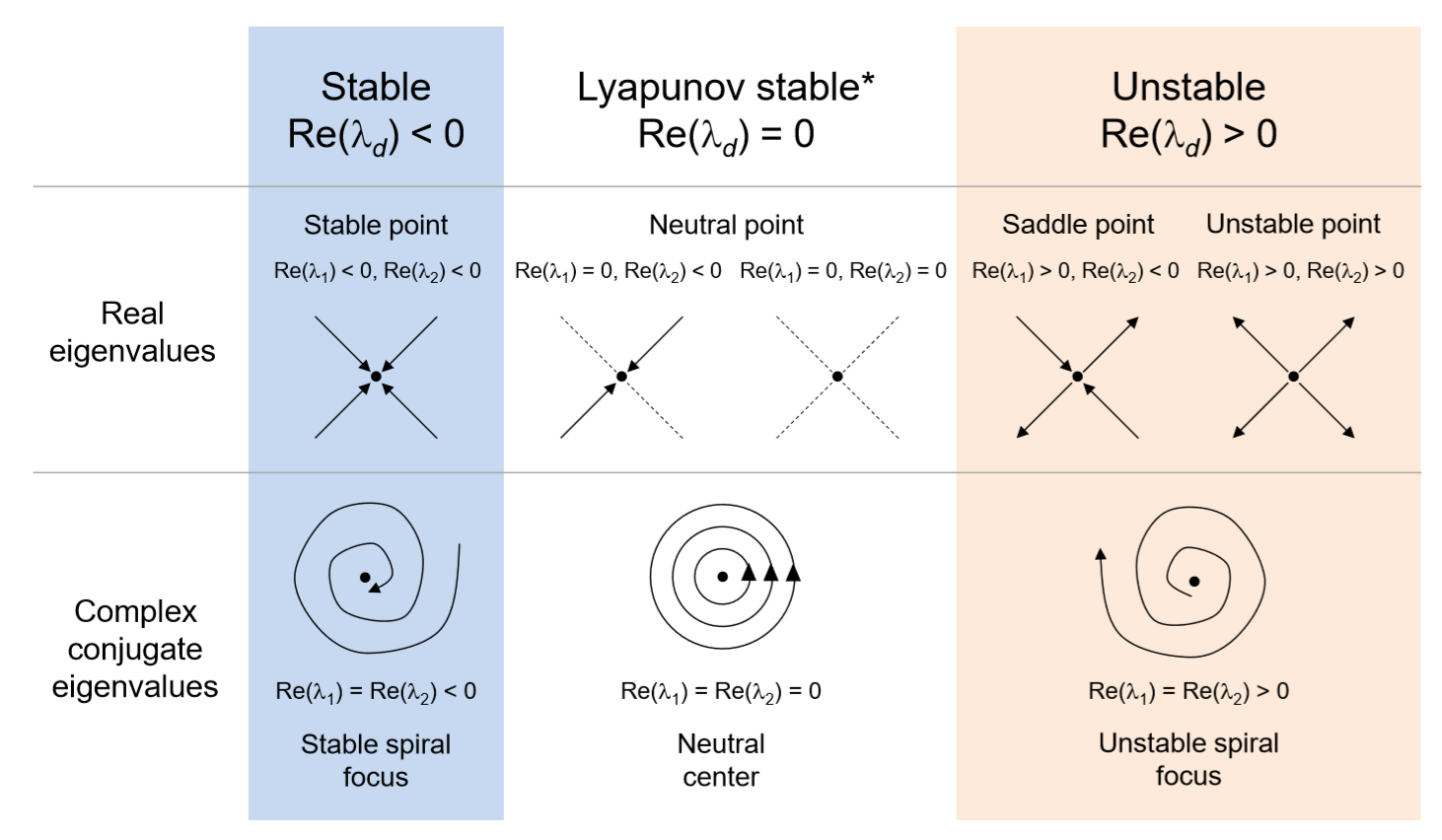
Note that the final result is very similar to that of discrete-time models. The rest of the process is something we are already familiar with: Calculate the eigenvalues of \(J\) and interpret the results to determine the stability of equilibrium point \(x_{eq}\). The only differences from discrete-time models are that you need to look at the real parts of the eigenvalues, and then compare them with 0, not 1. Figure 7.6 shows a schematic summary of classifications of equilibrium points for two-dimensional continuous-time dynamical systems.
1. Find an equilibrium point of the system you are interested in.
2. Calculate the Jacobian matrix of the system at the equilibrium point.
3. Calculate the eigenvalues of the Jacobian matrix.
4. If the real part of the dominant eigenvalue is:
• Greater than \(0⇒\)The equilibrium point is unstable.
– If other eigenvalues have real parts less than 0, the equilibrium point is a saddle point.
• Less than\( 0⇒\)The equilibrium point is stable.
• Equal to\( 0⇒\)The equilibrium point may be neutral (Lyapunov stable).
5. In addition, if there are complex conjugate eigenvalues involved, oscillatory dynamics are going on around the equilibrium point. If those complex conjugate eigenvalues are the dominant ones, the equilibrium point is called a stable or unstable spiral focus (or a neutral center if the point is neutral).
Consider the logistic growth model \((r > 0, K > 0)\):
\[\frac{dx}{dt} =rx(1-\frac{x}{K}) \label{7.70} \]
Conduct a linear stability analysis to determine whether this model is stable or not at each of its equilibrium points \(x_{eq} = 0,K\).
Consider the following differential equations that describe the interaction between two species called \(commensalism\) (species \(x\) benefits from the presence of species y but doesn’t influence \(y\)):
\[\frac{dx}{dt} =-x +rxy-x^{2}\label{(7.71)} \]
\[\frac{dy}{dt} =y(1-y)\label{(7.72)} \]
\[x \geq 0, y\geq 0, r>1\label{(7.73)} \]
1. Find all the equilibrium points.
2. Calculate the Jacobian matrix at the equilibrium point where \(x > 0\) and \(y > 0\).
3. Calculate the eigenvalues of the matrix obtained above.
4. Based on the result, classify the equilibrium point into one of the following: Stable point, unstable point, saddle point, stable spiral focus, unstable spiral focus, or neutral center.
Consider the differential equations of the \(SIR model\):
\[\frac{dS}{dI}= -aSI\\label{(7.74)}]
\[\frac{dI}{dt} =aSI -bI\label{(7.75)} \]
\[\frac{dR}{dt} =bI\label{(7.76)} \]
As you see in the equations above, \(R\) doesn’t influence the behaviors of \(S\) and \(I\), so you can safely ignore the third equation to make the model two-dimensional. Do the following:
1. Find all the equilibrium points (which you may have done already in Exercise 7.1.3).
2. Calculate the Jacobian matrix at each of the equilibrium points.
3. Calculate the eigenvalues of each of the matrices obtained above. 4. Based on the results, discuss the stability of each equilibrium point.