
7.1: Trigonometry
- Page ID
- 155865

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)In this chapter we shall study the trigonometric functions, i.e., the sine and cosine function and other functions that are built up from them. Let us start from the beginning and introduce the basic concepts of trigonometry.
The unit circle \(x^{2}+y^{2}=1\) has radius 1 and center at the origin.
Two points \(P\) and \(Q\) on the unit circle determine an arc \(\mathscr{P Q}\), an angle \(\angle P O Q\), and a sector \(P O Q\). The arc starts at \(P\) and goes counterclockwise to \(Q\) along the circle. The sector \(P O Q\) is the region bounded by the arc \(\mathscr{P Q}\) and the lines \(O P\) and \(O Q\). As Figure 7.1.1 shows, the arcs \(\mathscr{P Q}\) and \(\mathscr{Q P}\) are different.

Trigonometry is based on the notion of the length of an arc. Lengths of curves were introduced in Section 6.3. Although that section provides a useful background, this chapter can also be studied independently of Chapter 6. As a starting point we shall give a formula for the length of an arc in terms of the area of a sector. (This formula was proved as a theorem in Section 6.3 but can also be taken as the definition of arc length.)
The length of an arc \(\mathscr{P Q}\) on the unit circle is equal to twice the area of the sector \(P O Q, s=2 A\).
This formula can be seen intuitively as follows. Consider a small arc \(\mathscr{P Q}\) of length \(\triangle s\) (Figure 7.1.2). The sector \(P O Q\) is a thin wedge which is almost a right triangle of altitude one and base \(\Delta s\). Thus \(\Delta A \sim \frac{1}{2} \Delta s\). Making \(\Delta s\) infinitesimal and adding up, we get \(A=\frac{1}{2} s\).
The number \(\pi \sim 3.14159\) is defined as the area of the unit circle. Thus the unit circle has circumference \(2 \pi\).
The area of a sector \(P O Q\) is a definite integral. For example, if \(P\) is the point \(P(1,0)\) and the point \(Q(x, y)\) is in the first quadrant, then we see from Figure 7.1.3 that the area is
\[A(x)=\frac{1}{2} x \sqrt{1-x^{2}}+\int_{x}^{1} \sqrt{1-t^{2}} d t \nonumber \]
Notice that \(A(x)\) is a continuous function of \(x\). The length of an are has the following basic property.
.jpg?revision=1&size=bestfit&width=372&height=294)

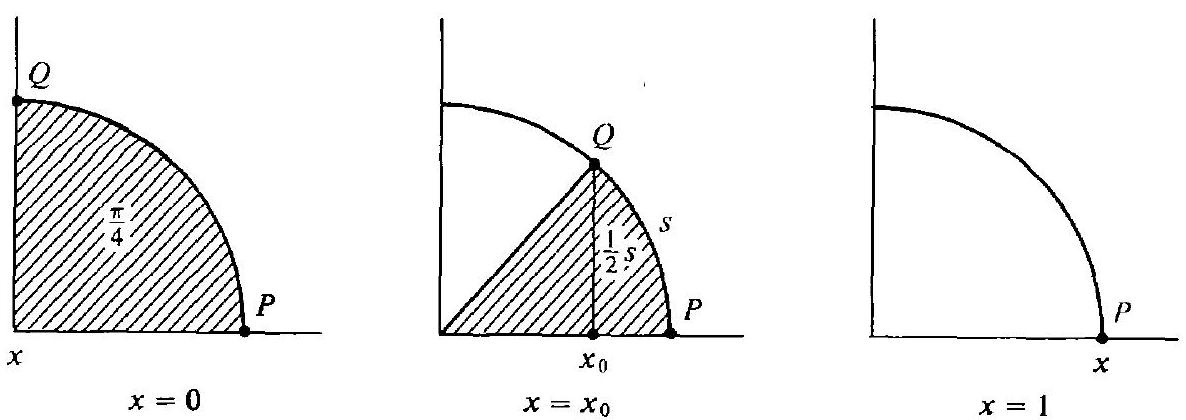
Let \(P\) be the point \(P(1,0)\). For every number s between 0 and \(2 \pi\) there is a point \(Q\) on the unit circle such that the are \(\mathscr{P Q}\) has length \(s\).
PROOF
We give the proof for \(s\) between 0 and \(\pi / 2\), whence
\[0 \leq \frac{1}{2} s \leq \pi / 4 \nonumber \]
Let \(A(x)\) be the area of the sector \(P O Q\) where \(Q=Q(x, y)\) (Figure 7.1.4). Then \(A(0)=\pi / 4, A(1)=0\) and the function \(A(x)\) is continuous for \(0 \leq x \leq 1\). By the Intermediate Value Theorem there is a point \(x_{0}\) between 0 and 1 where the sector has area \(\frac{1}{2} s\),
\[A\left(x_{0}\right)=\frac{1}{2} s \nonumber \]
Therefore the arc \(\mathscr{P Q}\) has length
\[2 A\left(x_{0}\right)=s \nonumber \]
.jpg?revision=1&size=bestfit&width=764&height=271)
Arc lengths are used to measure angles. Two units of measurement for angles are radians (best for mathematics) and degrees (used in everyday life).
Let \(P\) and \(Q\) be two points on the unit circle. The measure of the angle \(\angle P O Q\) in radians is the length of the arc \(\mathscr{P Q}\). A degree is defined as
\[1^{\circ}=\pi / 180 \text { radians } \nonumber \]
whence the measure of \(\angle P O Q\) in degrees is \(180 / \pi\) times the length of \(\overparen{P Q}\).
Approximately, \(1^{\circ} \sim 0.01745\) radians,
\[1 \text { radian } \sim 57^{\circ} 18^{\prime}=\left(57 \frac{18}{60}\right)^{\circ} \nonumber \]
A complete revolution is \(360^{\circ}\) or \(2 \pi\) radians. A straight angle is \(180^{\circ}\) or \(\pi\) radians. A right angle is \(90^{\circ}\) or \(\pi / 2\) radians.
It is convenient to take the point \((1,0)\) as a starting point and measure arc length around the unit circle in a counterclockwise direction. Imagine a particle which moves with speed one counterclockwise around the circle and is at the point \((1,0)\) at time \(t=0\). It will complete a revolution once every \(2 \pi\) units of time. Thus if the particle is at the point \(P\) at time \(t\), it will also be at \(P\) at all the times \(t+2 k \pi, k\) an integer. Another way to think of the process is to take a copy of the real line, place the origin at the point \((1,0)\), and wrap the line around the circle infinitely many times with the positive direction going counterclockwise. Then each point on the circle will correspond to an infinite family of real numbers spaced \(2 \pi\) apart (Figure 7.1.5).

The Greek letters \(\theta\) (theta) and \(\phi\) (phi) are often used as variables for angles or circular arc lengths.
Let \(P(x, y)\) be the point at counterclockwise distance 0 around the unit circle starting from \((1,0) . x\) is called the cosine of \(\theta\) and \(y\) the sine of \(\theta\),
\[x=\cos \theta, \quad y=\sin \theta \nonumber \]

\(\operatorname{Cos} \theta \cdot\) and \(\sin \theta\) are shown in Figure 7.1.6. Geometrically, if \(\theta\) is between 0 and \(\pi / 2\) so that the point \(P(x, y)\) is in the first quadrant, then the radius \(O P\) is the hypotenuse of a right triangle with a vertical side \(\sin \theta\) and horizontal side \(\cos \theta\). By Theorem \(1, \sin \theta\) and \(\cos \theta\) are real functions defined on the whole real line. We write \(\sin ^{n} \theta\) for \((\sin \theta)^{n}\), and \(\cos ^{n} \theta\) for \((\cos \theta)^{n}\). By definition \((\cos \theta, \sin \theta)=(x, y)\) is a point on the unit circle \(x^{2}+y^{2}=1\), so we always have
\[\sin ^{2} \theta+\cos ^{2} \theta=1 \nonumber \]
Also,
\[-1 \leq \sin \theta \leq 1, \quad-1 \leq \cos \theta \leq 1 \nonumber \]
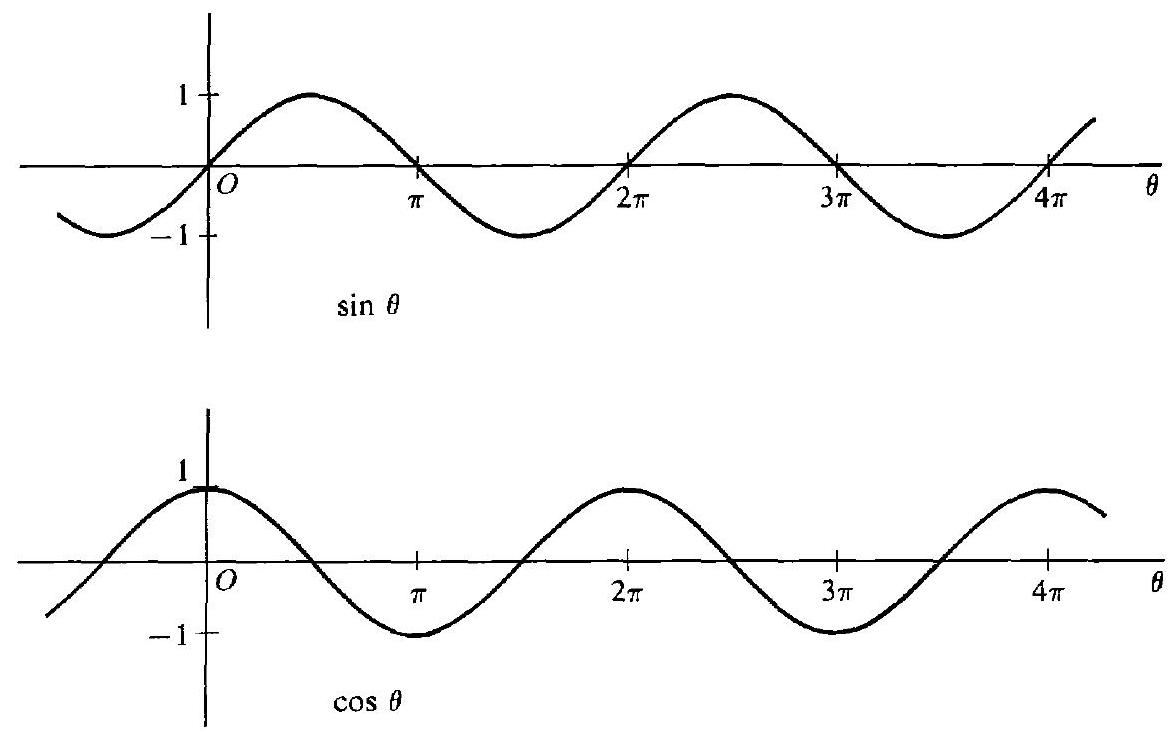
\(\operatorname{Sin} \theta\) and \(\cos \theta\) are periodic finctions with period \(2 \pi\). That is,
\[\begin{aligned} & \sin (\theta+2 \pi n)=\sin \theta \\ & \cos (\theta+2 \pi n)=\cos \theta \end{aligned} \nonumber \]
for all integers \(n\). The graphs of \(\sin 0\) and \(\cos \theta\) are infinitely repeating waves which oscillate between -1 and +1 (Figure 7.1.7).
For infinite values of \(\theta\), the values of \(\sin \theta\) and \(\cos \theta\) continue to oscillate between -1 and 1 . Thus the limits
\[\begin{array}{ll} \lim _{\theta \rightarrow \infty} \sin \theta, & \lim _{\theta \rightarrow-\infty} \sin \theta \\ \lim _{\theta \rightarrow \infty} \cos \theta, & \lim _{\theta \rightarrow-\infty} \cos \theta \end{array} \nonumber \]
do not exist. Figure 7.1.8 shows parts of the hyperreal graph of \(\sin 0\), for positive and negative infinite values of \(\theta\), through infinite telescopes.
The motion of our particle traveling around the unit circle with speed one starting at \((1,0)\) (Figure 7.1.9) has the parametric equations
\[x=\cos \theta, \quad y=\sin \theta \nonumber \]
.jpg?revision=1&size=bestfit&width=635&height=398)


The following table shows a few values of \(\sin \theta\) and \(\cos \theta\), for \(\theta\) in either radians or degrees.
| \(\theta\) in radians | 0 | \(\frac{\pi}{6}\) | \(\frac{\pi}{4}\) | \(\frac{\pi}{3}\) | \(\frac{\pi}{2}\) | \(\frac{3 \pi}{4}\) | \(\pi\) | \(\frac{3 \pi}{2}\) | \(2 \pi\) |
|---|---|---|---|---|---|---|---|---|---|
| \(\theta\) in degrees | \(0^{\circ}\) | \(30^{\circ}\) | \(45^{\circ}\) | \(60^{\circ}\) | \(90^{\circ}\) | \(135^{\circ}\) | \(180^{\circ}\) | \(270^{\circ}\) | \(360^{\circ}\) |
| \(\sin \theta\) | 0 | \(1 / 2\) | \(\sqrt{2} / 2\) | \(\sqrt{3} / 2\) | 1 | \(\sqrt{2} / 2\) | 0 | -1 | 0 |
| \(\cos \theta\) | 1 | \(\sqrt{3} / 2\) | \(\sqrt{2} / 2\) | \(1 / 2\) | 0 | \(-\sqrt{2} / 2\) | -1 | 0 | 1 |
The other trigonometric functions are defined as follows.
\[\begin{array}{ll} \text { tangent: } & \tan \theta=\frac{\sin \theta}{\cos \theta} \\ \text { cotangent: } & \cot \theta=\frac{\cos \theta}{\sin \theta} \\ \text { secant: } & \sec \theta=\frac{1}{\cos \theta} \\ \text { cosecant: } & \csc \theta=\frac{1}{\sin \theta} \end{array} \nonumber \]
These functions are defined everywhere except where there is a division by zero. They are periodic with period \(2 \pi\). Their graphs are shown in Figure 7.1.10.
.jpg?revision=1&size=bestfit&width=611&height=400)

When 0 is strictly between 0 and \(\pi / 2\), trigonometric functions can be described as the ratio of two sides of a right triangle with an angle 0 . Let \(a\) be the side opposite \(\theta, b\) the side adjacent to \(\theta, c\) the hypotenuse as in Figure 7.1.11. Comparing this triangle with a similar triangle whose hypotenuse is a radius of the unit circle, we see that
\[\begin{array}{lll} \sin \theta=\frac{a}{c}, & \sec \theta=\frac{c}{b}, & \tan \theta=\frac{a}{b} \\ \cos \theta=\frac{b}{c}, & \csc \theta=\frac{c}{a}, & \cot \theta=\frac{b}{a} \end{array} \nonumber \]

Here is a table of trigonometric identities. The diagrams in Figure 7.1.12 suggest possible proofs. ((6) and (7) are called the addition formulas.)
- \(\sin ^{2} \theta+\cos ^{2} \theta=1 \quad\) (Figure 7.1.12(a))
- \(\tan ^{2} \theta+1=\sec ^{2} \theta \quad\) (Figure 7.1.12(b))
- \(\cot ^{2} \theta+1=\csc ^{2} \theta \quad\) (Figure 7.1.12(c))
- \(\sin (-\theta)=-\sin \theta, \quad \cos (-\theta)=\cos \theta\) (Figure 7.1.12(d))
- \(\sin (\pi / 2-\theta)=\cos \theta, \quad \cos (\pi / 2-\theta)=\sin \theta\) (Figure 7.1.12(e))
- \(\sin (\theta+\phi)=\sin \theta \cos \phi+\cos \theta \sin \phi\) (Figure 7.1.12(f))
- \(\cos (\theta+\phi)=\cos \theta \cos \phi-\sin \theta \sin \phi\)
PROBLEMS FOR SECTION 7.1
In Problems 1-6, derive the given identity using the formula \(\sin ^{2} \theta+\cos ^{2} \theta=1\) and the addition formulas for \(\sin (\theta+\phi)\) and \(\cos (\theta+\phi)\).
\[\begin{array}{llll} \mathbf{1} & \tan ^{2} \theta+1=\sec ^{2} \theta & \mathbf{2} & \cos ^{2} \theta+\cos ^{2} \theta \cot ^{2} \theta=\cot ^{2} \theta \\ \mathbf{3} & \sin 2 \theta=2 \sin \theta \cos \theta & \mathbf{4} & \cos 2 \theta=\cos ^{2} \theta-\sin ^{2} \theta \\ \mathbf{5} & \sin ^{2}\left(\frac{1}{2} \theta\right)=\frac{1-\cos \theta}{2} & 6 & \tan (\theta+\phi)=\frac{\tan \theta+\tan \phi}{1-\tan \theta \tan \phi} \end{array} \nonumber \]
In Problems 7-10, find all values of \(\theta\) for which the given equation is true.
\[\begin{array}{rlrl} 7 & \sin \theta=\cos \theta & 8 & \sin \theta \cos \theta=0 \\ 9 & \sec \theta=0 & 10 & 5 \sin 3 \theta=0 \end{array} \nonumber \]
11 Find a value of \(\theta\) where \(\sin 2 \theta\) is not equal to \(2 \sin \theta\).
Determine whether the limits exist in Problems 12-17.
| 12 | \(\lim _{x \rightarrow \infty} \sin x\) | 13 | \(\lim _{x \rightarrow x} \frac{\sin x}{x}\) |
| 14 | \(\lim _{x \rightarrow \infty} x \sin x\) | 15 | \(\lim _{x \rightarrow 0} x \cos (1 / x)\) |
| 16 | \(\lim _{x \rightarrow 0} \cot x\) | 17 | \(\lim _{x \rightarrow 0} \tan x\) |
18 Find all values of \(\theta\) where \(\tan \theta\) is undefined.
19 Find all values of \(\theta\) where \(\csc \theta\) is undefined.