So far the only types of line integrals which we have discussed are those along curves in . But the definitions and properties which were covered in Sections 4.1 and 4.2 can easily be extended to include functions of three variables, so that we can now discuss line integrals along curves in .
Definition : Line Integrals
For a real-valued function and a curve in , parametrized by , the line integral of with respect to arc length is
The line integralof along with respect to is
The line integral of along with respect to is
The line integral of along with respect to is
Similar to the two-variable case, if then the line integral can be thought of as the total area of the “picket fence” of height at each point along the curve in .
Vector fields in are defined in a similar fashion to those in , which allows us to define the line integral of a vector field along a curve in .
Definition
For a vector field and a curve in with a smooth parametrization , the line integral of along is
where is the position vector for points on .
Similar to the two-variable case, if represents the force applied to an object at a point then the line integral represents the work done by that force in moving the object along the curve in .
Some of the most important results we will need for line integrals in are stated below without proof (the proofs are similar to their two-variable equivalents).
Theorem
For a vector field and a curve with a smooth parametrization and position vector ,
where is the unit tangent vector to at .
Theorem : Chain Rule
If is a continuously differentiable function of are differentiable functions of is a differentiable function of , and
Also, if are continuously differentiable function of , then
and
Theorem : Potential
Let be a vector field in some solid , with continuously differentiable functions on . Let be a smooth curve in parametrized by . Suppose that there is a real-valued function such that . Then
where are the endpoints of .
Corollary
If a vector field \(\textbf{f}\) has a potential in a solid , then for any closed curve in (i.e. for any real-valued function .
Example
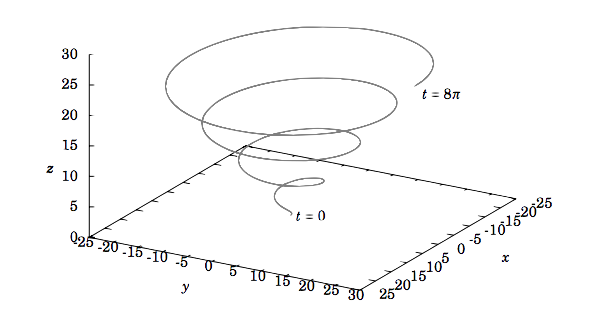
Let and let be the curve in parametrized by
Evaluate . (Note: is called a conical helix. See Figure 4.5.1).
Solution
Since , we have
so since along the curve , then
Figure 4.5.1 Conical helix
Example
Let be a vector field in . Using the same curve from Example 4.12, evaluate .
Solution:
It is easy to see that is a potential for (i.e. .
So by Theorem 4.12 we know that
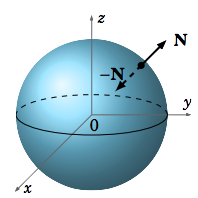
We will now discuss a generalization of Green’s Theorem in to orientable surfaces in , called Stokes’ Theorem. A surface in is orientable if there is a continuous vector field N in such that N is nonzero and normal to (i.e. perpendicular to the tangent plane) at each point of . We say that such an N is a normal vector field.
For example, the unit sphere is orientable, since the continuous vector field is nonzero and normal to the sphere at each point. In fact, is another normal vector field (see Figure 4.5.2). We see in this case that is what we have called an outward normal vector, and is an inward normal vector. These “outward” and “inward” normal vector fields on the sphere correspond to an “outer” and “inner” side, respectively, of the sphere. That is, we say that the sphere is a two-sided surface. Roughly, “two-sided” means “orientable”. Other examples of two-sided, and hence orientable, surfaces are cylinders, paraboloids, ellipsoids, and planes.
Figure 4.5.2
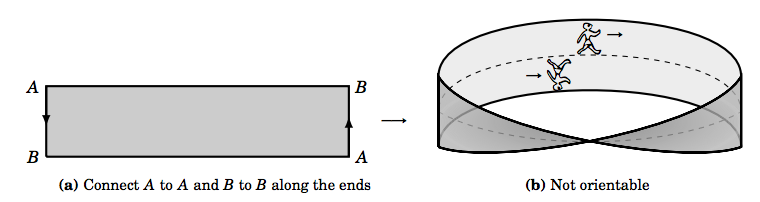
You may be wondering what kind of surface would not have two sides. An example is the Möbius strip, which is constructed by taking a thin rectangle and connecting its ends at the opposite corners, resulting in a “twisted” strip (see Figure 4.5.3).
Figure 4.5.3: Möbius strip
If you imagine walking along a line down the center of the Möbius strip, as in Figure 4.5.3(b), then you arrive back at the same place from which you started but upside down! That is, your orientation changed even though your motion was continuous along that center line. Informally, thinking of your vertical direction as a normal vector field along the strip, there is a discontinuity at your starting point (and, in fact, at every point) since your vertical direction takes two different values there. The Möbius strip has only one side, and hence is nonorientable.
For an orientable surface which has a boundary curve , pick a unit normal vector n such that if you walked along with your head pointing in the direction of n, then the surface would be on your left. We say in this situation that n is a positive unit normal vector and that is traversed n-positively. We can now state Stokes’ Theorem:
Theorem : Stoke's Theorem
Let be an orientable surface in whose boundary is a simple closed curve , and let be a smooth vector field defined on some subset of that contains . Then
where
n is a positive unit normal vector over , and is traversed n-positively.
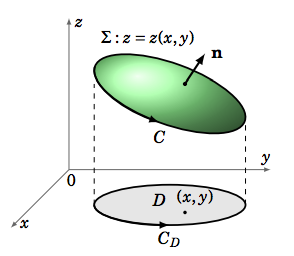
Proof: As the general case is beyond the scope of this text, we will prove the theorem only for the special case where is the graph of for some smooth real-valued function varying over a region in .
Projecting onto the -plane, we see that the closed curve (the boundary curve of ) projects onto a closed curve which is the boundary curve of (see Figure 4.5.4). Assuming that has a smooth parametrization, its projection in the -plane also has a smooth parametrization, say
Figure 4.5.4
and so can be parametrized (in ) as
since the curve is part of the surface . Now, by the Chain Rule (Theorem 4.4 in Section 4.2), for , we know that
and so
where
for . Thus, by Green’s Theorem applied to the region , we have
Thus,
Now, by Equation in Theorem 4.11, we have
Similarly,
Thus,
In a similar fashion, we can calculate
So subtracting gives
since by the smoothness of . Hence, by Equation ,
after factoring out a −1 from the terms in the first two products in Equation .
Now, recall from Section 2.3 (see p.76) that the vector is normal to the tangent plane to the surface at each point of . Thus,
is in fact a positive unit normal vector to (see Figure 4.5.4). Hence, using the parametrization , of the surface , we have and , and so . So we see that using Equation for curl f, we have
which, upon comparing to Equation , proves the Theorem.
Note: The condition in Stokes’ Theorem that the surface have a (continuously varying) positive unit normal vector n and a boundary curve traversed n-positively can be expressed more precisely as follows: if is the position vector for and is the unit tangent vector to , then the vectors T, n, T n form a right-handed system.
Also, it should be noted that Stokes’ Theorem holds even when the boundary curve is piecewise smooth.
Example
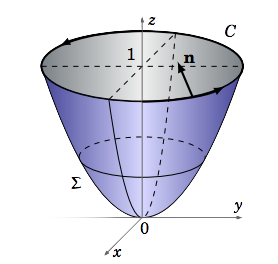
Verify Stokes’ Theorem for when is the paraboloid such that (see Figure 4.5.5).
Figure 4.5.5
Solution:
The positive unit normal vector to the surface is
and curl f = (1−0)i+(1−0)j+(1−0)k = i+j+k, so
Since can be parametrized as , then
The boundary curve is the unit circle laying in the plane (see Figure 4.5.5), which can be parametrized as . So
So we see that , as predicted by Stokes’ Theorem.
The line integral in the preceding example was far simpler to calculate than the surface integral, but this will not always be the case.
Example
Let be the elliptic paraboloid , and let be its boundary curve. Calculate , where is traversed counterclockwise
Solution
The surface is similar to the one in Example , except now the boundary curve is the ellipse laying in the plane . In this case, using Stokes’ Theorem is easier than computing the line integral directly. As in Example 4.14, at each point on the surface the vector
is a positive unit normal vector to . And calculating the curl of f gives
so
and so by Stokes’ Theorem
In physical applications, for a simple closed curve the line integral is often called the circulation of f around . For example, if E represents the electrostatic field due to a point charge, then it turns out that curl , which means that the circulation by Stokes’ Theorem. Vector fields which have zero curl are often called irrotational fields.
In fact, the term curl was created by the 19th century Scottish physicist James Clerk Maxwell in his study of electromagnetism, where it is used extensively. In physics, the curl is interpreted as a measure of circulation density. This is best seen by using another definition of curl f which is equivalent to the definition given by Equation . Namely, for a point ,
where is the surface area of a surface containing the point and with a simple closed boundary curve and positive unit normal vector n at . In the limit, think of the curve shrinking to the point , which causes , the surface it bounds, to have smaller and smaller surface area. That ratio of circulation to surface area in the limit is what makes the curl a rough measure of circulation density (i.e. circulation per unit area).
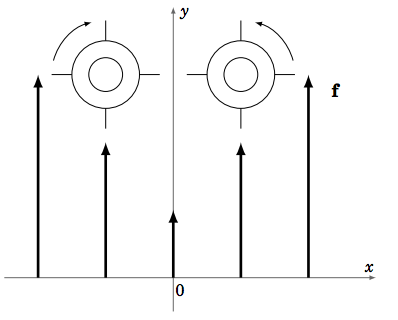
Figure 4.5.6 Curl and rotation
An idea of how the curl of a vector field is related to rotation is shown in Figure 4.5.6. Suppose we have a vector field which is always parallel to the -plane at each point and that the vectors grow larger the further the point is from the -axis. For example, . Think of the vector field as representing the flow of water, and imagine dropping two wheels with paddles into that water flow, as in Figure 4.5.6. Since the flow is stronger (i.e. the magnitude of f is larger) as you move away from the -axis, then such a wheel would rotate counterclockwise if it were dropped to the right of the -axis, and it would rotate clockwise if it were dropped to the left of the -axis. In both cases the curl would be nonzero (curl in our example) and would obey the right-hand rule, that is, curl points in the direction of your thumb as you cup your right hand in the direction of the rotation of the wheel. So the curl points outward (in the positive -direction) if and points inward (in the negative -direction) if . Notice that if all the vectors had the same direction and the same magnitude, then the wheels would not rotate and hence there would be no curl (which is why such fields are called irrotational, meaning no rotation).
Finally, by Stokes’ Theorem, we know that if is a simple closed curve in some solid region in and if is a smooth vector field such that curl , then
where is any orientable surface inside whose boundary is (such a surface is sometimes called a capping surface for ). So similar to the two-variable case, we have a threedimensional version of a result from Section 4.3, for solid regions in which are simply connected (i.e. regions having no holes):
The following statements are equivalent for a simply connected solid region in :
has a smooth potential
is independent of the path for any curve in
for every simple closed curve in
in (i.e. curl )
Part (d) is also a way of saying that the differential form is exact.
Example
Determine if the vector field has a potential in .
Solution
Since is simply connected, we just need to check whether curl f = 0 throughout , that is,