
5.2: Dihedral Groups
- Page ID
- 81061

Another special type of permutation group is the dihedral group. Recall the symmetry group of an equilateral triangle in Chapter 3. Such groups consist of the rigid motions of a regular \(n\)-sided polygon or \(n\)-gon. For \(n = 3, 4, \ldots\text{,}\) we define the nth dihedral group to be the group of rigid motions of a regular \(n\)-gon. We will denote this group by \(D_n\text{.}\) We can number the vertices of a regular \(n\)-gon by \(1, 2, \ldots, n\) (Figure 5.19). Notice that there are exactly \(n\) choices to replace the first vertex. If we replace the first vertex by \(k\text{,}\) then the second vertex must be replaced either by vertex \(k+1\) or by vertex \(k-1\text{;}\) hence, there are \(2n\) possible rigid motions of the \(n\)-gon. We summarize these results in the following theorem.
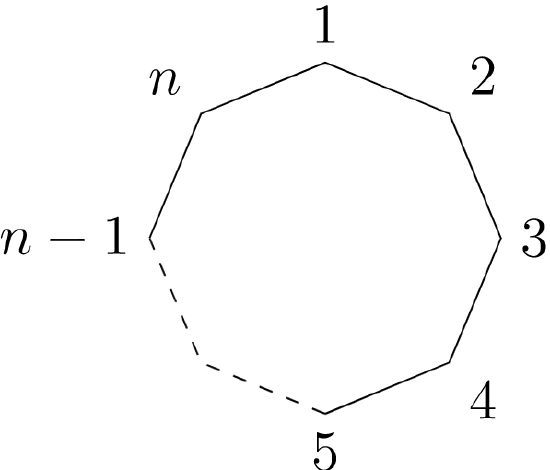
\(Figure \text { } 5.19.\) A regular \(n\)-gon
The dihedral group, \(D_n\text{,}\) is a subgroup of \(S_n\) of order \(2n\text{.}\
The group \(D_n\text{,}\) \(n \geq 3\text{,}\) consists of all products of the two elements \(r\) and \(s\text{,}\) satisfying the relations
- Proof
-
The possible motions of a regular \(n\)-gon are either reflections or rotations (Figure 5.22). There are exactly \(n\) possible rotations:
\[ \identity, \frac{360^{\circ} }{n}, 2 \cdot \frac{360^{\circ} }{n}, \ldots, (n-1) \cdot \frac{360^{\circ} }{n}\text{.} \nonumber \]We will denote the rotation \(360^{\circ} /n\) by \(r\text{.}\) The rotation \(r\) generates all of the other rotations. That is,
\[ r^k = k \cdot \frac{360^{\circ} }{n}\text{.} \nonumber \]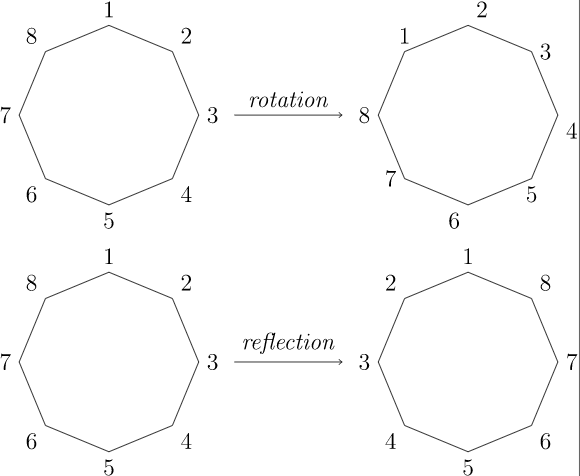 \(Figure \text { } 5.22.\) Rotations and reflections of a regular \(n\)-gon
\(Figure \text { } 5.22.\) Rotations and reflections of a regular \(n\)-gonLabel the \(n\) reflections \(s_1, s_2, \ldots, s_n\text{,}\) where \(s_k\) is the reflection that leaves vertex \(k\) fixed. There are two cases of reflections, depending on whether \(n\) is even or odd. If there are an even number of vertices, then two vertices are left fixed by a reflection, and \(s_1 = s_{n/2 + 1}, s_2 = s_{n/2 + 2}, \ldots, s_{n/2} = s_n\text{.}\) If there are an odd number of vertices, then only a single vertex is left fixed by a reflection and \(s_1, s_2, \ldots, s_n\) are distinct (Figure 5.23). In either case, the order of each \(s_k\) is two. Let \(s = s_1\text{.}\) Then \(s^2 = 1\) and \(r^n = 1\text{.}\) Since any rigid motion \(t\) of the \(n\)-gon replaces the first vertex by the vertex \(k\text{,}\) the second vertex must be replaced by either \(k+1\) or by \(k-1\text{.}\) If the second vertex is replaced by \(k+1\text{,}\) then \(t = r^k\text{.}\) If the second vertex is replaced by \(k-1\text{,}\) then \(t = r^k s\text{.}\) 2 Hence, \(r\) and \(s\) generate \(D_n\text{.}\) That is, \(D_n\) consists of all finite products of \(r\) and \(s\text{,}\)
\[ D_n = \{1, r, r^2, \ldots, r^{n-1}, s, rs, r^2 s, \ldots, r^{n-1} s\}\text{.} \nonumber \]We will leave the proof that \(srs = r^{-1}\) as an exercise.
Since we are in an abstract group, we will adopt the convention that group elements are multiplied left to right. \(Figure \text { } 5.23.\) Types of reflections of a regular \(n\)-gon
\(Figure \text { } 5.23.\) Types of reflections of a regular \(n\)-gon