
3.3: Hyperbolic geometry
- Page ID
- 85718

Before the discovery of hyperbolic geometry, it was believed that Euclidean geometry was the only possible geometry of the plane. In fact, hyperbolic geometry arose as a byproduct of efforts to prove that there was no alternative to Euclidean geometry. In this section, we present a Kleinian version of hyperbolic geometry.
Definition 3.3.1.
Let \(\mathbb{D}=\{z\colon |z|\lt 1\}\) denote the open unit disk in the complex plane. The hyperbolic group, denoted \(\mathbf{H}\), is the subgroup of the Möbius group \(\mathbf{M}\) of transformations that map \(\mathbb{D}\) onto itself. The pair \((\mathbb{D},\mathbf{H})\) is the (Poincaré) disk model of hyperbolic geometry.
Comments on terminology: Beware of the two different meanings of the adjective "hyperbolic". To say that a Möbius transformation is hyperbolic means that it is conjugate to a homothety (see Subsection 3.2.4). That is not the same thing as an element of the group of hyperbolic transformations.
The hyperbolic transformation group
We begin with an observation about Möbius transformations that map open disks onto themselves. Let \(C=\{z\colon |z-a|=r\}\) be a circle with center a and radius \(r \gt
0\text{.}\) Let \(D=\{z\colon |z-a|\lt r\}\) denote the open disk bounded by \(C\text{,}\) and let \(E=\{z\colon |z-a|\gt r\}\) denote the complement of the closed disk bounded by \(C\text{.}\) Now suppose that a Möbius transformation \(T\) maps \(D\) onto itself. Every point \(z\in D\) has a symmetric point \(z^{\ast C}\in E\text{,}\) and because \(T\) takes symmetric points to symmetric points (Proposition 3.2.16), it must be that \(T\) maps \(E\) onto itself. By process of elimination, it must be that \(T\) maps \(C\) onto itself. Thus we have proved the following Lemma as a special case.
Lemma 3.3.2.
If \(T\in \mathbf{H}\text{,}\) then \(T\) maps the unit circle onto itself.
Given \(T\in \mathbf{H}\text{,}\) let \(z_0\in\mathbb{D}\) be the point that \(T\) maps to \(0\text{.}\) It must be that \(T\) maps the symmetric point \(\frac{1}{z^\ast}\) to \(\infty\text{,}\) so \(T\) has the form
\begin{equation*}
Tz = \alpha \frac{z-z_0}{z-\frac{1}{z_0^\ast}}=
\alpha z_0^\ast \frac{z-z_0}{1-z_0^\ast z}
\end{equation*}
Proposition 3.3.3.
A Möbius transformation \(T\) is in \(\mathbf{H}\)H if an only if \(T\) can be written in the form
\begin{equation}
Tz=e^{it}\frac{z-z_0}{1-z_0^\ast z}\label{diskhypgptrans0inftyform}\tag{3.3.1}
\end{equation}
for some \(t\in \mathbb{R}\) and \(z_0\in \mathbb{D}\text{.}\) Alternatively, we have \(T\in \mathbf{H}\) if and only if \(T\) can be written in the form
\begin{equation}
Tz=\frac{az+b}{b^\ast
z+a^\ast}\label{diskhypgptranssu11form}\tag{3.3.2}
\end{equation}
for some \(a,b\in \mathbb{C}\) such that \(|a|^2-|b|^2=1\text{.}\)
Classification of clines in hyperbolic geometry
The clines of Möbius geometry are classified into several types in hyperbolic geometry, as summarized in Table 3.3.4.
Table 3.3.4. Clines in hyperbolic geometry
| hyperbolic curve type | cline type |
| hyperbolic straight line | a cline that intersects the unit circle at right angles |
| hyperbolic circle | a circle completely contained in \(\mathbb{D}\) |
| horocycle | a circle with all but one point in \(\mathbb{D}\), tangent to the unit circle |
| hypercycle | a cline that intersects the unit circle at a non-right angle |
Normal forms for the hyperbolic group
In this subsection, we follow the development of normal forms for general Möbius transformations given in Subsection 3.2.4 to derive normal forms and graphical interpretations for transformations in the hyperbolic group. We begin with an observation about fixed points of a Möbius transformation that maps a cline to itself.
Lemma 3.3.5.
Let \(T\in \mathbf{M}\) and let \(C\) be a cline. If \(Tz=z\text{,}\) then \(T(z^{\ast C})=z^{\ast C}\text{.}\)
- Proof.
-
Apply Proposition 3.2.16
- There is a pair of fixed points \(p,q\) with \(|p|\lt 1\text{,}\) \(|q|\gt 1\text{,}\) and \(q=\frac{1}{p^\ast}\text{,}\) that is, \(p,q\) are a pair of symmetric points (with respect to the unit circle) that do not lie on the unit circle.
- There is a pair of fixed points that lie on the unit circle.
- There is a single fixed point that lies on the unit circle.
- Checkpoint 3.3.6.
-
Give an argument to justify the three cases above.
![]()
Figure 3.3.7. Three types of hyperbolic transformations
For cases \(1\) and \(2\) above, the map \(T\) acting on the \(z\)-plane is conjugate to the map \(U=S\circ T\circ S^{-1}\) acting on the \(w\)-plane by \(Uw=\lambda w\text{,}\) for some nonzero \(\lambda\in\mathbb{C}\text{,}\) via the map \(w=Sz=\frac{z-p}{z-q}\text{.}\) In case \(1\), the map \(S\) takes the unit circle to some polar circle, say \(C\text{,}\) so \(U\) must map \(C\) to itself. It follows that \(|\lambda|=1\text{,}\) so the Möbius normal form type for \(T\) is elliptic. The action of \(T\) is a rotation about Steiner circles of the second kind (hyperbolic circles) with respect to the fixed points \(p,q\text{.}\) A transformation \(T\in \mathbf{H}\) of this type is called a hyperbolic rotation. See Figure 3.3.7.
For case \(2\), the map \(w=Sz=\frac{z-p}{z-q}\) takes the unit circle to a straight line, say \(L\text{,}\) through the origin, so \(U=S\circ T\circ S^{-1}\) must map \(L\) to itself. It follows that \(\lambda\) is real. Since \(S\) maps \(\mathbb{D}\) to one of the two half planes on either side of \(L\text{,}\) the map \(U\) must take this half plane to itself. If follows that \(\lambda\) must be a positive real number, so the Möbius normal form type for \(T\) is hyperbolic. The action of \(T\) is a flow about Steiner circles of the first kind (hypercycles and one hyperbolic straight line) with respect to the fixed points \(p,q\text{.}\) A transformation \(T\in \mathbf{H}\) of this type is called a hyperbolic translation. See Figure 3.3.7.
For case \(3\), the conjugating map \(w=Sz=\frac{1}{z-p}\) takes \(T\) to \(U=S\circ T\circ S^{-1}\) of the form \(Uw=w+\beta\) for some \(\beta\neq 0\text{.}\) The Möbius normal form type for \(T\) is parabolic. The action of \(T\) is a flow along degenerate Steiner circles (horocycles) tangent to the unit circle at \(p\text{.}\) A transformation \(T\in \mathbf{H}\) of this type is called a parallel displacement. See Figure 3.3.7.
This completes the list of transformation types for the hyperbolic group. See Table 3.3.8 for a summary.
Table 3.3.8. Normal forms for the hyperbolic group
| hyperbolic transformation type | Möbius normal form | graphical dynamic |
| hyperbolic rotation | elliptic | flow around hyperbolic circles |
| parallel displacement | parabolic | flow around horocycles |
| hyperbolic translation | hyperbolic | flow along hypercycles |
| (none) | loxodromic |
Hyperbolic length and area
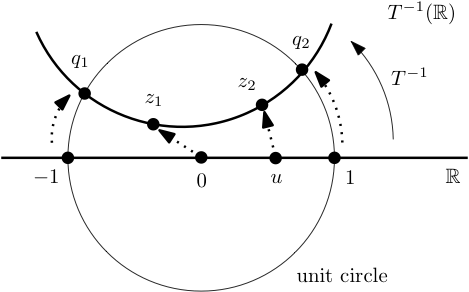
Figure 3.3.9. Constructing the hyperbolic straight line containing two points \(z_1,z_2\)
Let \(z_1,z_2\) be distinct points in \(\mathbb{D}\) Let \(T\in\mathbf{H}\) be the transformation that sends \(z_1\to 0\) and \(z_2\to u\gt 0\text{.}\) Then \(T^{-1}(\mathbb{R})\) is a hyperbolic straight line that contains \(z_1,z_2\text{.}\) Let \(q_1=T^{-1}(-1)\) and \(q_2=T^{-1}(1)\text{.}\) See Figure 3.3.9.
- Checkpoint 3.3.10.
-
Use Proposition 3.3.3 to write a formula for the transformation \(T\) in the previous paragraph.
Solution
Let \(Sz=\frac{z-z_1}{1-z_1^\ast z}\text{,}\) let \(t=-\arg
(Sz_2)\text{,}\) and let \(Tz=e^{it}Sz\text{,}\) so that we have \(Tz_1=0\) and \(Tz_2=u\gt 0\text{.}\) Because \(T\in \mathbf{H}\text{,}\) \(T\) is determined by the two parameters .
1\text{,}\) we have
\begin{equation*}
1\leq \frac{1+u}{1-u}\lt \infty
\end{equation*}
with equality on the left if and only if \(u=0\text{.}\)
- Checkpoint 3.3.11.
-
Do the simple calculation mentioned above.
HintUse (3.2.12).
\begin{equation}
d(z_1,z_2)=
\left\{\begin{array}{cc}\ln((z_1,z_2,q_2,q_1)) & z_1\neq
z_2 \\ 0 & z_1=z_2\end{array}\right.\label{hyperbolicdistdef}\tag{3.3.3}
\end{equation}
\begin{equation}
d(z_1,z_2) = \ln\left(\frac{1+u}{1-u}\right)\label{disthyperbolicfrac}\tag{3.3.4}
\end{equation}
where \(u=\left|\frac{z_2-z_1}{1-z_1^\ast z_2}\right|\text{.}\)
- Checkpoint 3.3.12.
-
Justify the value of \(u\) in (3.3.4).
Proposition 3.3.13.
The function \(d\) given by (3.3.3) is invariant under the action of the hyperbolic group. That is, we have
\begin{equation}
d(z_1,z_2) = d(Tz_1,Tz_2)\tag{3.3.5}
\end{equation}
for all \(z_1,z_2\in \mathbb{D}\) and for all \(T\in\mathbf{H}\text{.}\)
- Checkpoint 3.3.14.
-
Prove Proposition 3.3.13.
Proposition 3.3.15.
The function \(d\) given by (3.3.3) defines a metric on \(\mathbb{D}\text{.}\) That is, \(d\) satisfies
- \(d(z_1,z_2)\geq 0\text{,}\) and \(d(z_1,z_2)=0\) if and only if \(z_1=z_2\)
- \(\displaystyle d(z_1,z_2)=d(z_2,z_1)\)
- \(d(z_1,z_3)\leq d(z_1,z_2)+d(z_2,z_3)\) (the triangle inequality)
for all \(z_1,z_2,z_3\) in \(\mathbb{D}\text{.}\)
- Proof.
-
Property 1 follows immediately from (3.3.4). Property 2 is a simple calculation: just write down the cross ratio expressions for \(d(z_1,z_2)\) and \(d(z_2,z_1)\) and compare. The proof of Property 3 is outlined in exercise Exercise 3.3.6.4.
+ iy(t)\text{,}\) where \(x(t),y(t)\) are differentiable real-valued functions of the real parameter \(t\) on an interval \(a\lt t\lt b\text{.}\) Consider a short segment of \(\gamma\text{,}\) say, on an interval \(t_0\leq t\leq
t_1\text{.}\) Let \(z_0=z(t_0)\) and \(z_1=z(t_1)\text{.}\) Then we have \(d(z(t_0),z(t_1))=\ln\left(\frac{1+u}{1-u}\right)\) where \(u=\left|\frac{z_1-z_0}{1-z_0^\ast(z_1)}\right|\text{.}\) The quantity \(|z_1-z_0|\) is well-approximated by \(|z'(t_0)|dt\text{,}\) where \(z'(t)=x'(t)+iy'(t)\) and \(dt=t_1-t_0\text{.}\) Thus, \(u\) is well-approximated by \(\frac{|z'(t_0)|}{1-|z(t_0)|^2}\;dt\text{.}\) The first order Taylor approximation for \(\ln((1+u)/(1-u))\) is \(2u\text{.}\) Putting this all together, we have the following.
\begin{equation}
\text{Length}(\gamma)=2\int_a^b \frac{|z'(t)|}{1-|z(t)|^2}\;dt\label{hyperboliclengthformula}\tag{3.3.6}
\end{equation}
- Checkpoint 3.3.16.
-
Show that the first order Taylor approximation of \(\ln((1+u)/(1-u))\) is \(2u\text{.}\)
- Checkpoint 3.3.17.
-
Find the length of the hyperbolic circle parameterized by \(z(t) = \alpha e^{it}\) for \(0\leq t\leq 2\pi\text{,}\) where \(0\lt \alpha\lt 1\)
We conclude this subsection on hyperbolic length and area with an integral formula for the area of a region \(R\) in \(\mathbb{D}\text{,}\) following the development in [4]. As a function of the two real variables \(r\) and \(\theta\text{,}\) the polar form expression \(z=re^{i\theta}\) gives rise to the two parameterized curves \(r\to z_1(r)=re^{i\theta}\) (where \(\theta\) is constant) and \(\theta \to z_2(\theta) = re^{i\theta}\) (where \(r\) is constant). Using \(z_1'(r) =
e^{i\theta}\) and \(z_2'(\theta)=ire^{i\theta}\text{,}\) the arc length differential \(ds=\frac{2|z'(t)|\;dt}{1-|z(t)|^2}\) for the two curves are the following.
\begin{equation*}
\frac{2|e^{i\theta}|\;dr}{1-r^2}=\frac{2\;dr}{1-r^2}
\;(\text{for curve } z_1)
\end{equation*}
\begin{equation*}
\frac{2|ire^{i\theta}|\;dr}{1-r^2}=\frac{2r\;dr}{1-r^2}
\;(\text{for curve } z_2)
\end{equation*}
\begin{equation}
\text{Area}(R)=\iint_R
dA = \iint_R \frac{4r\;dr\;d\theta}{(1-r^2)^2}.\label{hyperbolicareaintformula}\tag{3.3.10}
\end{equation}
- Checkpoint 3.3.18.
-
Find the area of the hyperbolic disk \(\{|z|\leq
\alpha\}\text{,}\) for \(0\lt \alpha\lt 1\text{.}\)
The upper-half plane model
Definition 3.3.19. The upper half-plane model of hyperbolic geometry.
Let \(\mathbb{U}=\{z\colon Im(z)\gt 0\}=\{z\colon Im(z)\gt 0\}\) denote the upper half of complex plane above the real axis, and let \(\mathbf{H}_{\mathbb{U}}\) denote the subgroup of the Möbius group \(\mathbf{M}\) of transformations that map \(\mathbb{U}\) onto itself. The pair \((\mathbb{U},\mathbf{H}_{\mathbb{U}})\) is the upper half-plane model of hyperbolic geometry.
Proposition 3.3.20.
A Möbius transformation \(T\) is in \(\mathbf{H}_{\mathbb{U}}\) if and only if \(T\) can be written in the form
\begin{equation}
Tz=\frac{az+b}{cz+d}\label{halfplanehypgptrans}\tag{3.3.11}
\end{equation}
such that \(a,b,c,d\) are real and \(ad-bc\gt
0\text{.}\)
Hyperbolic straight lines in the upper half-plane model are clines that intersect the real line at right angles. The hyperbolic distance between two points \(z_1,z_2\) in the upper half-plane is
\begin{equation}
d(z_1,z_2)=\ln((z_1,z_2,q_2,q_1))\tag{3.3.12}
\end{equation}
z(t)=x(t)+iy(t)\) on the interval \(a\leq t\leq b\) is
\begin{equation}
\text{Length}(\gamma)=\int_a^b
\frac{|z'(t)|}{y(t)}\;dt.\label{halfplanelengthformula}\tag{3.3.13}
\end{equation}
\begin{equation}
\text{Area}(R)=\iint_R
dA = \iint_R \frac{dx\;dy}{y^2}.\label{upperhalfplaneareaintformula}\tag{3.3.14}
\end{equation}
Exercises
Exercise 1
Prove Proposition 3.3.3 using the following outline.
- Complete the proof of (3.3.1) using this outline: Let \(|z|=1\) and apply Lemma 3.3.2. We have
\begin{equation*}
Continue this derivation to show that \(|\alpha z_0^\ast|=1\text{.}\)
1=|Tz|=|\alpha z_0^\ast|\left| \frac{z-z_0}{1-z_0^\ast
z}\right|.
\end{equation*} - Prove (3.3.2) by verifying the following. Given \(z_0\in \mathbb{D}\) and \(t\in \mathbb{R}\text{,}\) show that the assignments \(a=\frac{e^{it/2}}{\sqrt{1-|z_0|^2}},
b=\frac{-e^{it/2}z_0}{\sqrt{1-|z_0|^2}}\) satisfy \(|a|^2-|b|^2=1\) and that\begin{equation}
Conversely, given \(a,b\in \mathbb{C}\) with \(|a|^2-|b|^2=1\text{,}\) show that the assignments \(t=2\arg a, z_0=-\frac{b}{a}\) satisfy \(z_0\in
\frac{az+b}{b^\ast z+a^\ast} = e^{it}\frac{z-z_0}{1-z_0^\ast z}\text{.}\label{twohyptransformssame}\tag{3.3.15}
\end{equation}
\mathbb{D}\text{,}\) and that (3.3.15) holds.
Exercise 2
Two points determine a line.
Let \(p,q\) be distinct points in \(\mathbb{D}\text{.}\) Show that there is a unique hyperbolic straight line that contains \(p\) and \(q\text{.}\)
- Hint
-
Start by choosing a transformation that sends \(p\to 0\text{.}\)
Exercise 3
Dropping a perpendicular from a point to a line.
Let \(L\) be a hyperbolic straight line and let \(p\in\mathbb{D}\) be a point not on \(L\text{.}\) Show that there is a unique hyperbolic straight line \(M\) that contains \(p\) and is orthogonal to \(L\text{.}\)
- Hint
-
Start by choosing a transformation that sends \(p\to 0\text{.}\)
Exercise 4
The triangle inequality for the hyperbolic metric.
Show that \(d(a,b)\leq d(a,c)+d(c,b)\) for all \(a,b,c\) in \(\mathbb{D}\) using the outline below.
- Show that the triangle inequality holds with strict equality when \(a,b,c\) are collinear and \(c\) is between \(a\) and \(b\text{.}\) Suggestion: This is a straightforward computation using the cross ratio expressions for the values of \(d\text{.}\)
- Show that the triangle inequality holds with strict inequality when \(a,b,c\) are collinear and \(c\) is not between \(a\) and \(b\text{.}\)
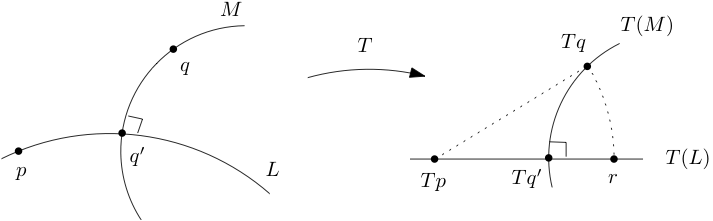
- Let \(p\in \mathbb{D}\) lie on a hyperbolic line \(L\text{,}\) let \(q\in \mathbb{D}\text{,}\) let \(M\) be a line through \(q\) perpendicular to \(L\) (this line \(M\) exists by Exercise 3.3.6.3), and let \(q'\) be the point of intersection of \(L,M\text{.}\) Show that \(d(p,q')\leq d(p,q)\text{.}\) Suggestion: apply \(T\in
\mathbf{H}\) that takes \(p\to 0\) and takes \(L\to \mathbb{R}\text{.}\) Let \(t=-\arg(Tq)\) if \(Re(Tq)\geq 0\) and let \(t=\pi-\arg(Tq)\) if \(t=\pi-\arg(Tq)\) Let \(r=e^{it}Tq\text{.}\) See Figure 3.3.21. - Given arbitrary \(a,b,c\text{,}\) apply a transformation \(T\) to send \(a\to 0\) and \(b\) to a nonnegative real point. Drop a perpendicular from Tc to the real line, say, to \(c'\text{.}\) Apply results from the previous steps of this outline.
Exercise 5
Prove Proposition 3.3.20.
Exercise 6
Length integral in the upper half-plane model.
This exercise is to establish (3.3.13). The strategy is to obtain the differential expression
\begin{equation*}
d(z(t_0),z(t_1))\approx \frac{|z'(t)|dt}{y(t)}
\end{equation*}
for a curve \(z(t)=x(t)+iy(t)\) with \(z(t_0)=z_0\text{,}\) \(z(t_1)=z_1\text{,}\) and \(dt=t_1=t_0\) using the following sequence of steps.
- First, map \(z_0,z_1\) in \(\mathbb{U}\) to \(z_0',z_1'\) in \(\mathbb{D}\) using a transformation \(\mu\) that preserves distance.
- Using the analysis we used to get the disk model length integral formula (3.3.6), we have
\begin{equation*}
where \(u=\left|\frac{z_1'-z_0'}{1-(z_0')^\ast
d(z_0',z_1')=\ln\left(\frac{1+u}{1-u}\right)
\end{equation*}
z_1'}\right|\text{.}\) - Translate the above expression in terms of \(z_0,z_1\text{,}\) and show that the differential approximation is \(\frac{|z'(t)|dt}{y(t)}\text{.}\)
Complete the exercise parts below to carry out the strategy just outlined.
- Show that \(\mu z=\frac{z-i}{z+i}\) takes \(\mathbb{U}\) to \(\mathbb{D}\).
- Let \(z_0'=\mu z_0\) and \(z_1'=\mu z_1\text{.}\) Show that
\begin{equation*}
for some real \(t\text{.}\)
\frac{z_1'-z_0'}{1-(z_0')^\ast
z_1'}=e^{it}\frac{z_1-z_0}{z_0^\ast - z_1}
\end{equation*} - Let \(u=\left|\frac{z_1-z_0}{z_0^\ast -
z_1}\right|\text{.}\) Show that\begin{equation*}
\ln\left(\frac{1+u}{1-u}\right)\approx \frac{|z(t)|dt}{y(t)}.
\end{equation*}
Exercise 7
Area integral in the upper half-plane model.
Adapt the argument in the paragraph preceding the disk model area integral (3.3.10) to establish the upper half-plane area integral (3.3.14).
Area of a hyperbolic triangle.
The following sequence of exercises establishes the area formula for hyperbolic triangles.
Exercise 8
Area of a doubly-asymptotic triangle.
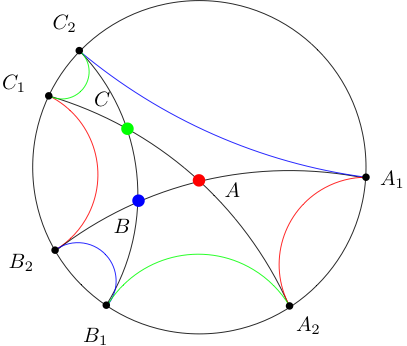
A triangle with one vertex in \(\mathbb{D}\) and two vertices on the unit circle, connected by arcs of circles that are orthogonal to the unit circle, is called a doubly-asymptotic hyperbolic triangle. Examples are \(\triangle AA_1A_2\text{,}\) \(\triangle
BB_1B_2\text{,}\) and \(\triangle CC_1C_2\) in Figure 3.3.22.
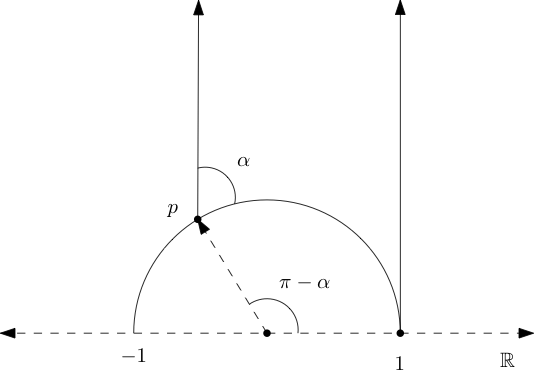
- Explain why any doubly-asymptotic triangle in the upper half-plane is congruent to the one shown in Figure 3.3.23 for some angle \(\alpha\text{.}\)
- Now use the integration formula for the upper half-plane model to show that the area of the doubly-asymptotic triangle with angle \(\alpha\) (at the vertex interior to \(\mathbb{U}\)) is \(\pi-\alpha\text{.}\)
Exercise 9
Area of an asymptotic n-gon.
A polygon with \(n\geq 3\) vertices on the unit circle, connected by arcs of circles that are orthogonal to the unit circle, is called an asymptotic \(n\)-gon. An example of an asymptotic hexagon is the figure with vertices \(A_1,A_2,B_1,B_2,C_2,C_2\) connected by the colored hyperbolic lines in Figure 3.3.22. Show that the area of an asymptotic \(n\)-gon is \(\pi(n-2)\text{.}\)
- Hint
-
Partition the asymptotic \(n\)-gon into \(n\) doubly-asymptotic triangles.
Exercise 10
Area of a hyperbolic triangle.
Let \(\triangle ABC\) be a hyperbolic triangle. Extend the three sides \(AB\text{,}\) \(BC\text{,}\) \(AC\) to six points on the unit circle. See Figure 3.3.22. Use a partition of the asymptotic hexagon whose vertices are these six points to show that the area of \(\triangle ABC\) is
\begin{equation}
\text{Area}(\triangle
ABC)= \pi-(\angle A +\angle B + \angle C).\label{hyperbolictrianglearea}\tag{3.3.16}
\end{equation}
- Hint
-
Partition the asymptotic hexagon with vertices \(A_1,A_2,B_1,B_2,C_1,C_2\text{.}\) Start with the six overlapping doubly-asymptotic triangles whose bases are colored arcs and whose vertex in \(\mathbb{D}\) is whichever of \(A,B,C\) matches the color of the base. For example, the two red doubly-asymptotic triangles are \(\triangle AA_1A_2\) and \(\triangle
AC_1B_2\text{.}\)