
6.6.E: Problems on Bijective Linear Maps and Jacobians
- Page ID
- 24091
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)(i) Can a functional determinant \(f=\operatorname{det}\left(v_{i k}\right)\) (see Note 1) be continuous or differentiable even if the functions \(v_{i k}\) are not?
(ii) Must a Jacobian map \(J_{f}\) be continuous or differentiable if \(f\) is?
Give proofs or counterexamples.
\(\Rightarrow\) Prove rule (b) on determinants. More generally, show that if \(f(\vec{x})=\vec{x}\) on an open set \(A \subseteq E^{n}\left(C^{n}\right),\) then \(J_{f}=1\) on \(A\).
Let \(f : E^{n} \rightarrow E^{n}\) (or \(C^{n} \rightarrow C^{n}\)), \(f=\left(f_{1}, \ldots, f_{n}\right)\).
Suppose each \(f_{k}\) depends on \(x_{k}\) only, i.e.,
\[f_{k}(\vec{x})=f_{k}(\vec{y}) \text{ if } x_{k}=y_{k},\]
regardless of the other coordinates \(x_{i}, y_{i}.\) Prove that \(J_{f}=\prod_{k=1}^{n} D_{k} f_{k}\).
[Hint: Show that \(D_{k} f_{i}=0\) if \(i \neq k\).]
In Corollary 1, show that
\[J_{h}(\vec{p})=\prod_{k=1}^{n} D_{k} f_{k}(\vec{p}) \cdot J_{g}(\vec{q})\]
if \(f\) also has the property specified in Problem 3. Then do all in "variables," with \(y_{k}=y_{k}\left(x_{k}\right)\) instead of \(f_{k}\).
Let \(E^{\prime}=E^{1}\) in Note 1. Prove that if all the \(v_{i k}\) are differentiable at \(p,\) then \(f^{\prime}(p)\) is the sum of \(n\) determinants, each arising from det \(\left(v_{i k}\right),\) by replacing the terms of one column by their derivatives.
[Hint: Use Problem 6 in Chapter 5, §1.]
Do Problem 5 for partials of \(f,\) with \(E^{\prime}=E^{n}\left(C^{n}\right),\) and for directionals \(D_{\vec{u}} f,\) in any normed space \(E^{\prime}.\) (First, prove formulas analogous to Problem 6 in Chapter 5, §1; use Note 3 in §1.) Finally, do it for the differential, \(d f(\vec{p} ; \cdot).\)
In Note 1 of §4, express the matrices in terms of partials (see Theorem 4 in §3). Invent a "variable" notation for such matrices, imitating Jacobians (Corollary 3).
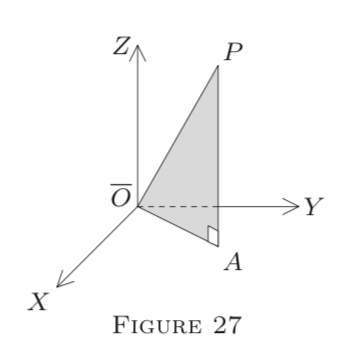
(i) Show that
\[\frac{\partial(x, y, z)}{\partial(r, \theta, \alpha)}=-r^{2} \sin \alpha\]
if
\[\begin{array}{l}{x=r \cos \theta,} \\ {y=r \sin \theta \sin \alpha, \text { and }} \\ {z=r \cos \alpha}\end{array}\]
(This transformation is passage to polars in \(E^{3};\) see Figure 27, where \(r=O P, \angle X O A=\theta,\) and \(\angle A O P=\alpha.)\)
(ii) What if \(x=r \cos \theta, y=r \sin \theta,\) and \(z=z\) remains unchanged (passage to cylindric coordinates)?
(iii) Same for \(x=e^{r} \cos \theta, y=e^{r} \sin \theta,\) and \(z=z\).
Is \(f=\left(f_{1}, f_{2}\right) : E^{2} \rightarrow E^{2}\) one-to-one or bijective, and is \(J_{f} \neq 0,\) if
(i) \(f_{1}(x, y)=e^{x} \cos y\) and \(f_{2}(x, y)=e^{x} \sin y\);
(ii) \(f_{1}(x, y)=x^{2}-y^{2}\) and \(f_{2}(x, y)=2 x y ?\)
Define \(f : E^{3} \rightarrow E^{3}\) (or \(C^{3} \rightarrow C^{3}\))
\[f(\vec{x})=\frac{\vec{x}}{1+\sum_{k=1}^{3} x_{k}}\]
on
\[A=\left\{\vec{x} | \sum_{k=1}^{3} x_{k} \neq-1\right\}\]
and \(f=\overrightarrow{0}\) on \(-A.\) Prove the following.
(i) \(f\) is one-to-one on \(A\) (find \(f^{-1}!\)).
(ii) \(J_{f}(\vec{x})=\frac{1}{\left(1+\sum_{k=1}^{3} x_{k}\right)^{4}}\).
(iii) Describe \(-A\) geometrically.
Given any sets \(A, B\) and maps \(f, g : A \rightarrow E^{\prime}, h : E^{\prime} \rightarrow E,\) and \(k : B \rightarrow A,\) prove that
(i) \((f \pm g) \circ k=f \circ k \pm g \circ k,\) and
(ii) \(h \circ(f \pm g)=h \circ f \pm h \circ g\) if \(h\) is linear.
Use these distributive laws to verify that
\[\phi^{-1} \circ(\theta-\phi) \circ \theta^{-1}=\phi^{-1}-\theta^{-1}\]
In Corollary 3.
[Hint: First verify the associativity of mapping composition.]
Prove that if \(\phi : E^{\prime} \rightarrow E\) is linear and one-to-one, so is \(\phi^{-1} : E^{\prime \prime} \rightarrow E^{\prime},\) where \(E^{\prime \prime}=\phi\left[E^{\prime}\right].\)
Let \(\vec{v}_{1}, \ldots, \vec{v}_{n}\) be the column vectors in \(\operatorname{det}[\phi].\) Prove that \(\operatorname{det}[\phi]\) turns into
(i) \(c \cdot \operatorname{det}[\phi]\) if one of the \(\vec{v}_{k}\) is multiplied by a scalar \(c\);
(ii) \(-\operatorname{det}[\phi],\) if any two of the \(\vec{v}_{k}\) are interchanged (consider \(\lambda\) in formula (1)).
Furthermore, show that
(iii) \(\operatorname{det}[\phi]\) does not change if some \(\vec{v}_{k}\) is replaced by \(\vec{v}_{k}+c \vec{v}_{i}(i \neq k)\);
(iv) \(\operatorname{det}[\phi]=0\) if some \(\vec{v}_{k}\) is \(\overrightarrow{0},\) or if two of the \(\vec{v}_{k}\) are the same.