
6.6: Examples of the Matrix Method





( \newcommand{\kernel}{\mathrm{null}\,}\)
Here we will give some examples for typical systems for the three cases mentioned in the last section.
A=(4233).
Eigenvalues: We first determine the eigenvalues.
0=|4−λ233−λ|
Therefore,
0=(4−λ)(3−λ)−60=λ2−7λ+60=(λ−1)(λ−6)
The eigenvalues are then λ=1,6. This is an example of Case I.
Eigenvectors: Next we determine the eigenvectors associated with each of these eigenvalues. We have to solve the system Av=λv in each case.
Case λ=1.
(4233)(v1v2)=(v1v2)
(3232)(v1v2)=(00)
This gives 3v1+2v2=0. One possible solution yields an eigenvector of
(v1v2)=(2−3)
Case λ=6
(4233)(v1v2)=6(v1v2)
(−223−3)(v1v2)=(00)
For this case we need to solve −2v1+2v2=0. This yields
(v1v2)=(11)
General Solution: We can now construct the general solution.
x(t)=c1eλ1tv1+c2eλ2tv2=c1et(2−3)+c2e6t(11)=(2c1et+c2e6t−3c1et+c2e6t)
A=(3−51−1).
Eigenvalues: Again, one solves the eigenvalue equation.
0=|3−λ−51−1−λ|
Therefore,
0=(3−λ)(−1−λ)+50=λ2−2λ+2λ=−(−2)±√4−4(1)(2)2=1±i
The eigenvalues are then λ=1+i,1−i. This is an example of Case III.
Eigenvectors: In order to find the general solution, we need only find the eigenvector associated with 1+i.
(3−51−1)(v1v2)=(1+i)(v1v2)(2−i−51−2−i)(v1v2)=(00)
We need to solve (2−i)v1−5v2=0. Thus,
(v1v2)=(2+i1)
Complex Solution: In order to get the two real linearly independent solutions, we need to compute the real and imaginary parts of veλt.
eλt(2+i1)=e(1+i)t(2+i1)
=et(cost+isint)(2+i1)=et((2+i)(cost+isint)cost+isint)=et((2cost−sint)+i(cost+2sint)cost+isint)=et(2cost−sintcost)+iet(cost+2sintsint)
General Solution: Now we can construct the general solution.
x(t)=c1et(2cost−sintcost)+c2et(cost+2sintsint)=et(c1(2cost−sint)+c2(cost+2sint)c1cost+c2sint)
Note: This can be rewritten as
x(t)=etcost(2c1+c2c1)+etsint(2c2−c1c2)
A=(7−191).
Eigenvalues:
0=|7−λ−191−λ|
Therefore,
0=(7−λ)(1−λ)+90=λ2−8λ+160=(λ−4)2
There is only one real eigenvalue, λ=4. This is an example of Case II.
Eigenvectors: In this case we first solve for v1 and then get the second linearly independent vector.
(7−191)(v1v2)=4(v1v2)(3−19−3)(v1v2)=(00)
Therefore, we have
3v1−v2=0,⇒(v1v2)=(13)
Second Linearly Independent Solution: Now we need to solve Av2−λv2=v1.
(7−191)(u1u2)−4(u1u2)=(13)(3−19−3)(u1u2)=(13)
Expanding the matrix product, we obtain the system of equations
3u1−u2=19u1−3u2=3
The solution of this system is (u1u2)=(12).
General Solution: We construct the general solution as
y(t)=c1eλtv1+c2eλt(v2+tv1)=c1e4t(13)+c2e4t[(12)+t(13)]=e4t(c1+c2(1+t)3c1+c2(2+3t))
6.6.1: Planar Systems - Summary
The reader should have noted by now that there is a connection between the behavior of the solutions obtained in Section 6.1.3 and the eigenvalues found from the coefficient matrices in the previous examples. In Table 6.2 we summarize some of these cases.
| Type | Eigenvalues | Stability |
|---|---|---|
| Node | Real λ, same signs |
λ<0, stable λ>0, unstable |
| Saddle | Real λ opposite signs | Mostly Unstable |
| Center | λ pure imaginary | − |
| Focus/Spiral | Complex λ,Re(λ)≠0 |
Re(λ)<0, stable Re(λ)>0, unstable |
| Degenerate Node | Repeated roots, | λ>0, stable |
| Lines of Equilibria | One zero eigenvalue | λ<0, stable |
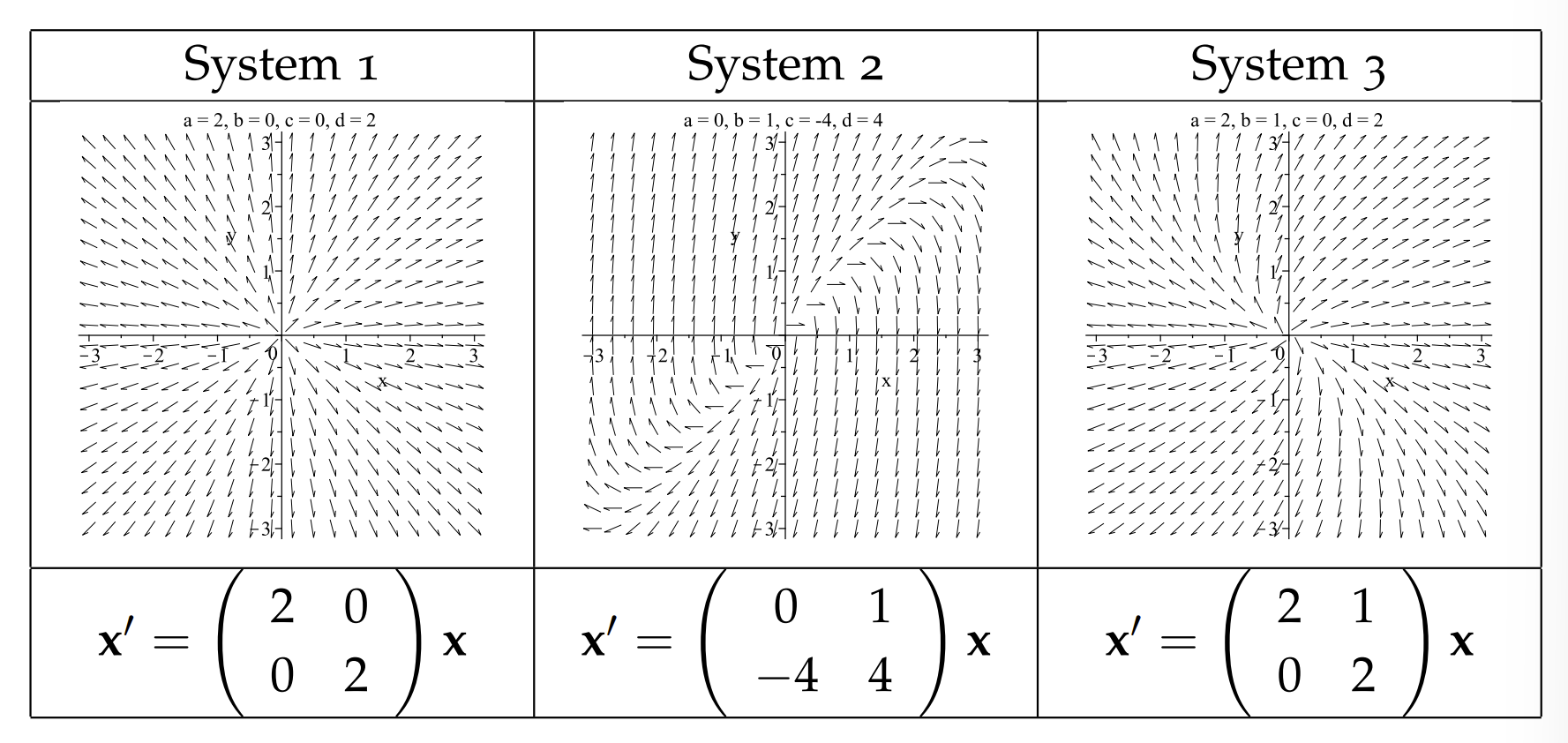
The connection, as we have seen, is that the characteristic equation for the associated second order differential equation is the same as the eigenvalue equation of the coefficient matrix for the linear system. However, one should be a little careful in cases in which the coefficient matrix in not diagonalizable. In Table 6.3 are three examples of systems with repeated roots. The reader should look at these systems and look at the commonalities and differences in these systems and their solutions. In these cases one has unstable nodes, though they are degenerate in that there is only one accessible eigenvector.
Another way to look at the classification of these solution is to use the determinant and trace of the coefficient matrix. Recall that the determinant and trace of A=(abcd) are given by detA=ad−bc and trA=a+d
We note that the general eigenvalue equation,
λ2−(a+d)λ+ad−bc=0
can be written as
λ2−(trA)λ+detA=0
Therefore, the eigenvalues are found from the quadratic formula as
λ1,2=trA±√(trA)2−4detA2
The solution behavior then depends on the sign of discriminant,
(trA)2−4detA
If we consider a plot of where the discriminant vanishes, then we could plot
(trA)2=4detA
in the detAtrA )-plane. This is a parabolic cure as shown by the dashed line in Figure 6.25. The region inside the parabola have a negative discriminant, leading to complex roots. In these cases we have oscillatory solutions. If trA=0, then one has centers. If trA<0, the solutions are stable spirals; otherwise, they are unstable spirals. If the discriminant is positive, then the roots are real, leading to nodes or saddles in the regions indicated.