
3.9: Nonautonomous Nonlinear Systems
- Page ID
- 106219

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
In this section we discuss nonautonomous systems. Recall that an autonomous system is one in which there is no explicit time dependence. A simple example is the forced nonlinear pendulum given by the nonhomogeneous equation
\[\ddot{x}+\omega^{2} \sin x=f(t) \label{3.48} \]
We can set this up as a system of two first order equations:
\[\begin{aligned}
&\dot{x}=y \\
&\dot{y}=-\omega^{2} \sin x+f(t)
\end{aligned} \label{3.49} \]
This system is not in a form for which we could use the earlier methods. Namely, it is a nonautonomous system. However, we introduce a new variable \(z(t)=t\) and turn it into an autonomous system in one more dimension. The new system takes the form
\[\begin{aligned}
&\dot{x}=y \\
&\dot{y}=-\omega^{2} \sin x+f(z) . \\
&\dot{z}=1
\end{aligned} \label{3.50} \]
This system is a three dimensional autonomous, possibly nonlinear, system and can be explored using our earlier methods.
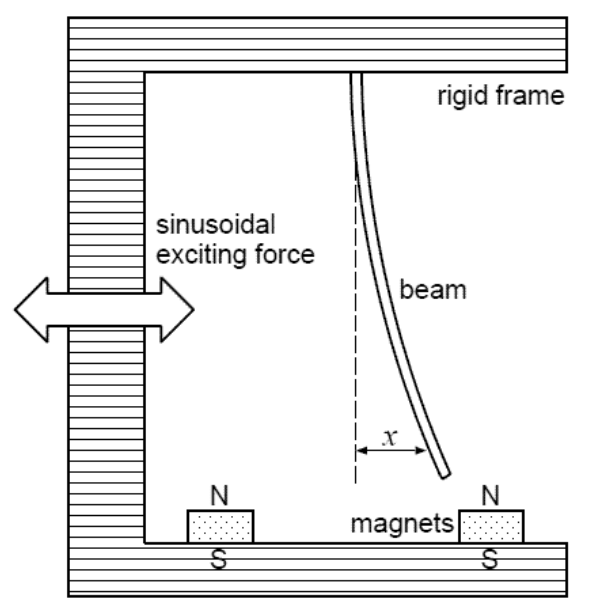
A more interesting model is provided by the Duffing Equation. This equation models hard spring and soft spring oscillations. It also models a periodically forced beam as shown in Figure 3.28. It is of interest because it is a simple system which exhibits chaotic dynamics and will motivate us towards using new visualization methods for nonautonomous systems.
The most general form of Duffing’s equation is given by
\[\ddot{x}+k \dot{x}+\left(\beta x^{3} \pm \omega_{0}^{2} x\right)=\Gamma \cos (\omega t+\phi). \label{3.51} \]
This equation models hard spring \((\beta>0)\) and soft spring \((\beta<0)\) oscillations. However, we will use a simpler version of the Duffing equation:
\[\ddot{x}+k \dot{x}+x^{3}-x=\Gamma \cos \omega t. \label{3.52} \]
Let’s first look at the behavior of some of the orbits of the system as we vary the parameters. In Figures 3.29 - 3.31 we show some typical solution plots superimposed on the direction field.
We start with the undamped (\(k=0\)) and unforced \((\Gamma = 0)\) Duffing equation,
\[\ddot{x} + x^3 - x == 0. \nonumber \]
We can write this second order equation as the autonomous system
\[\begin{aligned}
\dot{x}&=y \\
\dot{y} &= x(1-x^2)
\end{aligned} \label{3.53} \]
We see there are three equilibrium points at (0,0), (\(\pm 1,0\)). In Figure 3.29 we plot several orbits for We see that the three equilibrium points consist of two centers and a saddle.

We now turn on the damping. The system becomes
\[\begin{aligned}
\dot{x}&=y \\
\dot{y} &= -ky + x(1-x^2)
\end{aligned} \label{3.54} \]
In Figure 3.30 we show what happens when \(k = 0.1\) These plots are reminiscent of the plots for the nonlinear pendulum; however, there are fewer equilibria. The centers become stable spirals.
Next we turn on the forcing to obtain a damped, forced Duffing equation. The system is now nonautonomous.

\[\begin{aligned}
&\dot{x}=y \\
&\dot{y}=x\left(1-x^{2}\right)+\Gamma \cos \omega t .
\end{aligned} \label{3.55} \]
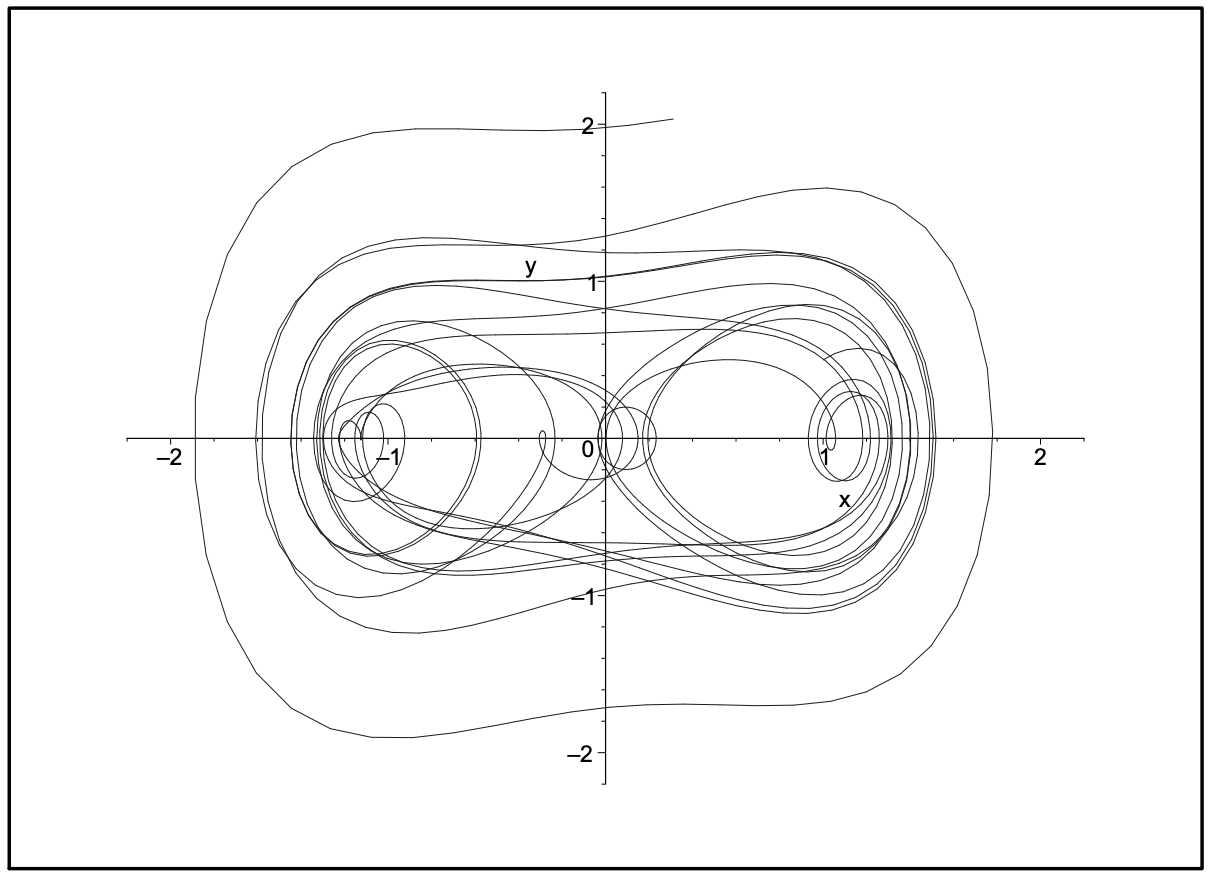
In Figure 3.31 we only show one orbit with \(k=0.1, \Gamma=0.5\), and \(\omega=1.25\). The solution intersects itself and look a bit messy. We can imagine what we would get if we added any more orbits. For completeness, we show in Figure 3.32 an example with four different orbits.
In cases for which one has periodic orbits such as the Duffing equation, Poincaré introduced the notion of surfaces of section. One embeds the orbit in a higher dimensional space so that there are no self intersections, like we saw in Figures 3.31 and 3.32. In Figure 3.33 we show an example where a simple orbit is shown as it periodically pierces a given surface.
In order to simplify the resulting pictures, one only plots the points at which the orbit pierces the surface as sketched in Figure 3.34. In practice, there is a natural frequency, such as \(\omega\) in the forced Duffing equation. Then, one plots points at times that are multiples of the period, \(T=\dfrac{2 \pi}{\omega}\). In Figure 3.35 we show what the plot for one orbit would look like for the damped, unforced Duffing equation.
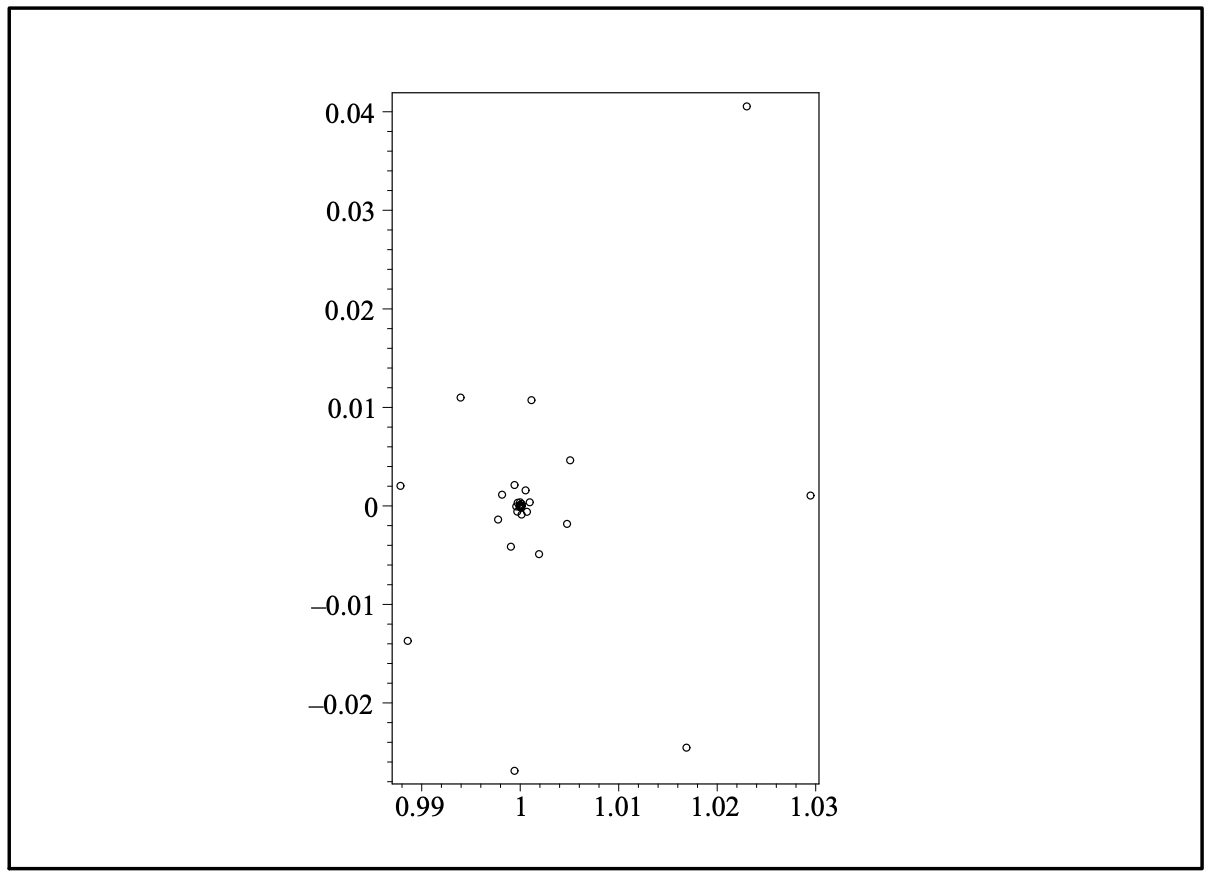
The more interesting case, is when there is forcing and damping. In this case the surface of section plot is given in Figure 3.36. While this is not as busy as the solution plot in Figure 3.31, it still provides some interesting behavior. What one finds is what is called a strange attractor. Plotting many orbits, we find that after a long time, all of the orbits are attracted to a small region in the plane, much like a stable node attracts nearby orbits. However, this



set consists of more than one point. Also, the flow on the attractor is chaotic in nature. Thus, points wander in an irregular way throughout the attractor. This is one of the interesting topics in chaos theory and this whole theory of dynamical systems has only been touched in this text leaving the reader to wander of into further depth into this fascinating field.
3.9.1 Maple Code for Phase Plane Plots
For reference, the plots in Figures 3.29 and 3.30 were generated in Maple using the following commands:

> with(DEtools): > Gamma:=0.5:omega:=1.25:k:=0.1: > DEplot([diff(x(t),t)=y(t), diff(y(t),t)=x(t)-k*y(t)-(x(t))^3 + Gamma*cos(omega*t)], [x(t),y(t)],t=0..500,[[x(0)=1,y(0)=0.5], [x(0)=-1,y(0)=0.5], [x(0)=1,y(0)=0.75], [x(0)=-1,y(0)=1.5]], x=-2..2,y=-2..2, stepsize=0.1, linecolor=blue, thickness=1, color=black);
The surface of section plots at the end of the last section were obtained using code from S. Lynch’s book Dynamical Systems with Applications Using Maple. The Maple code is given by
> Gamma:=0:omega:=1.25:k:=0.1:
> f:=
dsolve({diff(x(t),t)=y(t),diff(y(t),t)=x(t)-k*y(t)-(x(t))^3
+ Gamma*cos(omega*t),x(0)=1,y(0)=0.5},{x(t),y(t)},
type=numeric,method=classical,output=procedurelist):
> pt:=array(0..10000):x1:=array(0..10000):y1:=array(0..10000):
> imax:=4000:
> for i from 0 to imax do
> x1[i]:=eval(x(t),f(i*2*Pi/omega)):
> y1[i]:=eval(y(t),f(i*2*Pi/omega)):
> end do: > pts:=[[x1[n],y1[n]]\$ n=10..imax]:
> # Plot the points on the Poincare section #
> pointplot(pts,style=point,symbol=circle,symbolsize=10,
color=black,axes=BOXED,scaling=CONSTRAINED,
font=[TIMES,ROMAN,15]);