10.1: Distinct Real Eigenvalues


- Last updated
- May 24, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
We illustrate the solution method by example.
Example: Find the general solution of ˙x1=x1+x2,˙x2=4x1+x2.
The equation to be solved may be rewritten in matrix form as
ddt(x1x2)=(1141)(x1x2)
or in short hand as Equation ???.
We take as our ansatz x(t)=veλt, where v and λ are independent of t. Upon substitution into Equation ???, we obtain
λveλt=Avλt
and upon cancellation of the exponential, we obtain the eigenvalue problem
Av=λv.
Finding the characteristic equation using Equation ???, we have
0=det(A−λI)=λ2−2λ−3=(λ−3)(λ+1)
Therefore, the two eigenvalues are λ1=3 and λ2=−1.
To determine the corresponding eigenvectors, we substitute the eigenvalues successively into
(A−λI)v=0.
We will write the corresponding eigenvectors v1 and v2 using the matrix notation
(v1v2)=(v11v12v21v22),
where the components of v1 and v2 are written with subscripts corresponding to the first and second columns of a 2-by-2 matrix.
For λ1=3, and unknown eigenvector v1, we have from Equation ???
−2v11+v21=04v11−2v21=0
Clearly, the second equation is just the first equation multiplied by −2, so only one equation is linearly independent. This will always be true, so for the 2 -by-2 case we need only consider the first row of the matrix. The first eigenvector therefore satisfies v21=2v11. Recall that an eigenvector is only unique up to multiplication by a constant: we may therefore take v11=1 for convenience.
For λ2=−1, and eigenvector v2=(v12,v22)T, we have from Equation ???
2v12+v22=0,
so that v22=−2v12. Here, we take v12=1.
Therefore, our eigenvalues and eigenvectors are given by
λ1=3,v1=(12);λ2=−1,v2=(1−2).
Using the principle of superposition, the general solution to the ode is therefore
X(t)=c1v1eλ1t+c2v2eλ2t
or explicitly writing out the components,
x1(t)=c1e3t+c2e−tx2(t)=2c1e3t−2c2e−t
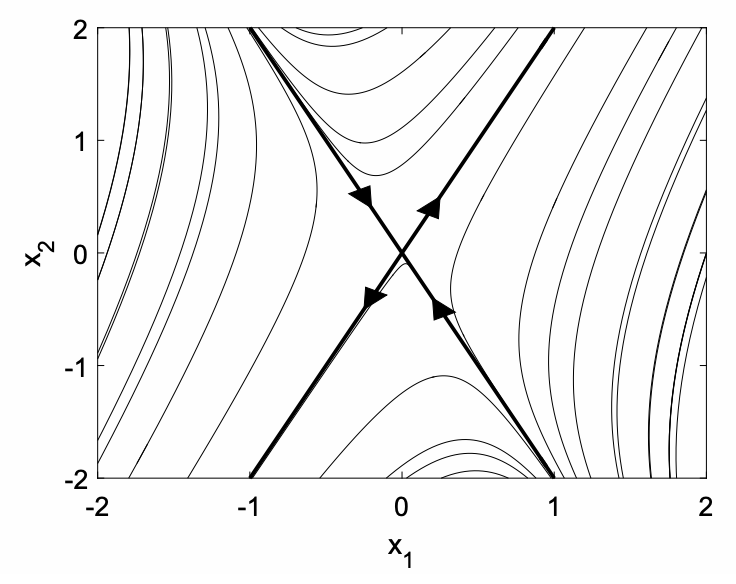
We can obtain a new perspective on the solution by drawing a phase portrait, shown in Fig. 10.1, with " x-axis" x1 and " y-axis" x2. Each curve corresponds to a different initial condition, and represents the trajectory of a particle with velocity given by the differential equation. The dark lines represent trajectories along the direction of the eigenvectors. If c2=0, the motion is along the eigenvector v1 with x2=2x1 and the motion with increasing time is away from the origin (arrows pointing out) since the eigenvalue λ1=3>0. If c1=0, the motion is along the eigenvector v2 with x2=−2x1 and motion is towards the origin (arrows pointing in) since the eigenvalue λ2=−1<0. When the eigenvalues are real and of opposite signs, the origin is called a saddle point. Almost all trajectories (with the exception of those with initial conditions exactly satisfying x2(0)=−2x1(0) ) eventually move away from the origin as t increases. When the eigenvalues are real and of the same sign, the origin is called a node. A node can be stable (negative eigenvalues) or unstable (positive eigenvalues).