
6.1: Problem Set
- Page ID
- 24166

EXERCISE \(\PageIndex{1}\)
Consider the \(C^{r}\), \(r \ge 1\), autonomous vector field on \(\mathbb{R}^2\):
\(\dot{x} = f(x)\),
with flow
\(\phi_{t}(\cdot)\),
and let \(x = \bar{x}\) denote a hyperbolic saddle type equilibrium point for this vector field. We denote the local stable and unstable manifolds of this equilibrium point by:
\(W_{loc}^{s}(\bar{x})\), \(W_{loc}^{u}(\bar{x})\),
respectively. The global stable and unstable manifolds of \(\bar{x}\) are defined by:
\(W^{s}(\bar{x}) \equiv \cup_{t \le 0} \phi_{t} (W_{loc}^{s}(\bar{x}))\),
\(W^{u}(\bar{x}) \equiv \cup_{t \ge 0} \phi_{t} (W_{loc}^{s}(\bar{x}))\),
(a) Show that \(W^{s}(\bar{x})\) and \(W^{u}(\bar{x})\) are invariant set.
(b) Suppose that \(p \in W^{s}(\bar{x})\), show that \(\phi_{t}(p) \rightarrow \bar{x}\) at an exponential rate as \(t \rightarrow \infty\).
(c) Suppose that \(p \in W^{u}(\bar{x})\), show that \(\phi_{t}(p) \rightarrow \bar{x}\) at an exponential rate as \(t \rightarrow -\infty\).
EXERCISE \(\PageIndex{2}\)
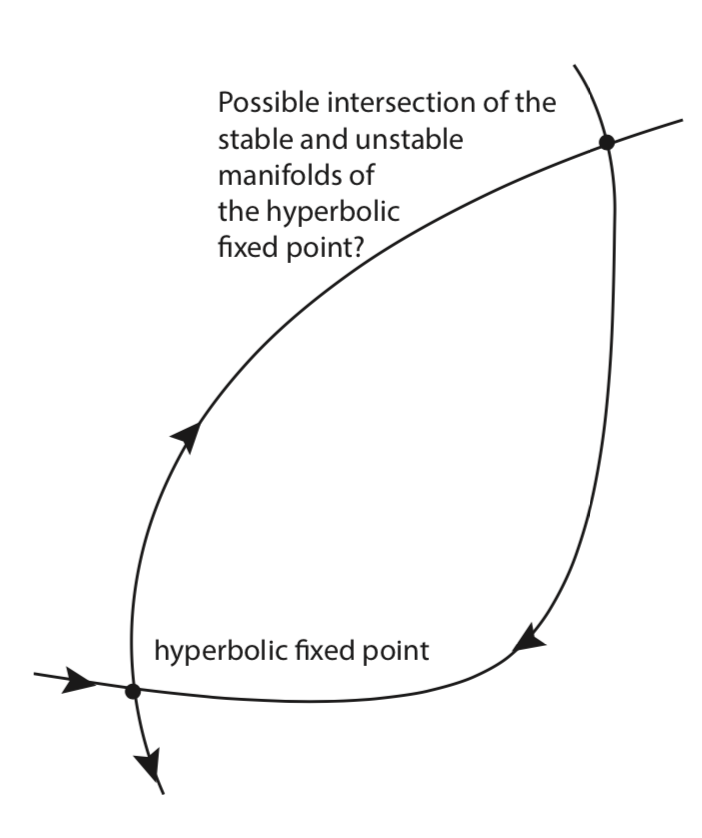
Consider the \(C^{r}, r \ge 1\), autonomous vector field on \(\mathbb{R}^2\) having a hyperbolic saddle point. Can its stable and unstable manifolds intersect at an isolated point (which is not a fixed point of the vector field) as shown in figure 2?
EXERCISE \(\PageIndex{3}\)
Consider the following autonomous vector field on the plane:
\(\dot{x} = \alpha x\),
\[\dot{y} = \beta y + \gamma x^{n+1}, \label{6.42}\]
where \(\alpha < 0\), \(\beta > 0\), \(\gamma\) is a real number, and n is a positive integer.
- Show that the origin is a hyperbolic saddle point.
- Compute and sketch the stable and unstable subspaces of the origin.
- Show that the stable and unstable subspaces are invariant under the linearized dynamics.
- Show the the flow generated by this vector field is given by:
\(x(t, x_{0}) = x_{0}e^{\alpha t}\),
\(y(t, x_{0}, y_{0}) = e^{\beta t}(y_{0} - \frac{\gamma x_{0}^{n+1}}{\alpha (n+1) - \beta}) + (\frac{\gamma x_{0}^{n+1}}{\alpha (n+1) - \beta}) e^{\alpha (n+1)t}\)
- Compute the global stable and unstable manifolds of the origin from the flow.
- Show that the global stable and unstable manifolds that you have computed are invariant.
- Sketch the global stable and unstable manifolds and discuss how they depend on g and n.
EXERCISE \(\PageIndex{4}\)
Suppose \(\dot{x} = f(x), x \in \mathbb{R}^n\) is a \(C^r\) vector field having a hyperbolic fixed point, \(x = x_{0}\), with a homoclinic orbit. Describe the homoclinic orbit in terms of the stable and unstable manifolds of \(x_{0}\).
EXERCISE \(\PageIndex{5}\)
Suppose \(\dot{x} = f(x), x \in \mathbb{R}^n\) is a \(C^r\) vector field having hyperbolic fixed points, \(x = x_{0}\) and \(x_{1}\), with a heteroclinic orbit connecting \(x_{0}\) and \(x_{1}\). Describe the heteroclinic orbit in terms of the stable and unstable manifolds of \(x_{0}\) and \(x_{1}\).