
5.1: Angles
- Page ID
- 31112

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Skills to Develop
- Draw angles in standard position.
- Convert between degrees and radians.
- Find coterminal angles.
- Find the length of a circular arc.
- Use linear and angular speed to describe motion on a circular path.
A golfer swings to hit a ball over a sand trap and onto the green. An airline pilot maneuvers a plane toward a narrow runway. A dress designer creates the latest fashion. What do they all have in common? They all work with angles, and so do all of us at one time or another. Sometimes we need to measure angles exactly with instruments. Other times we estimate them or judge them by eye. Either way, the proper angle can make the difference between success and failure in many undertakings. In this section, we will examine properties of angles.
Drawing Angles in Standard Position
Properly defining an angle first requires that we define a ray. A ray consists of one point on a line and all points extending in one direction from that point. The first point is called the endpoint of the ray. We can refer to a specific ray by stating its endpoint and any other point on it. The ray in Figure \(\PageIndex{1}\) can be named as ray EF, or in symbol form \(\overrightarrow{EF}\).
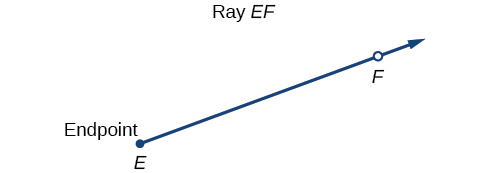
Figure \(\PageIndex{1}\)
An angle is the union of two rays having a common endpoint. The endpoint is called the vertex of the angle, and the two rays are the sides of the angle. The angle in Figure \(\PageIndex{2}\) is formed from \(\overrightarrow{ED}\) and \(\overrightarrow{EF}\). Angles can be named using a point on each ray and the vertex, such as angle DEF, or in symbol form \(∠DEF.\)
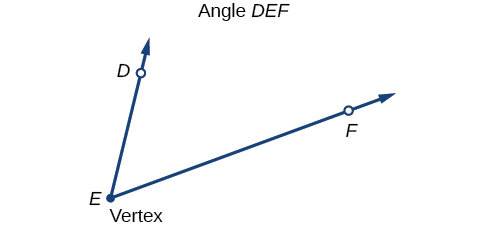
Figure \(\PageIndex{2}\)
Greek letters are often used as variables for the measure of an angle. Table \(\PageIndex{1}\) is a list of Greek letters commonly used to represent angles, and a sample angle is shown in Figure \(\PageIndex{3}\).
Table \(\PageIndex{1}\)
| \(θ\) | \(φ \text{ or }ϕ\) | \(α\) | \(β\) | \(γ\) |
| theta | phi | alpha | beta | gamma |
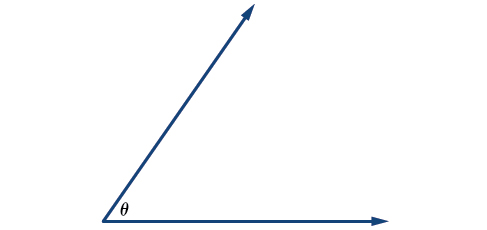
Figure \(\PageIndex{3}\): Angle theta, shown as \(∠θ\)
Angle creation is a dynamic process. We start with two rays lying on top of one another. We leave one fixed in place, and rotate the other. The fixed ray is the initial side, and the rotated ray is the terminal side. In order to identify the different sides, we indicate the rotation with a small arc and arrow close to the vertex as in Figure \(\PageIndex{4}\).
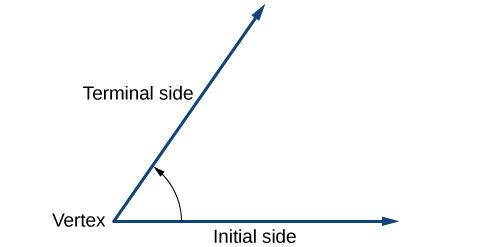
Figure \(\PageIndex{4}\)
As we discussed at the beginning of the section, there are many applications for angles, but in order to use them correctly, we must be able to measure them. The measure of an angle is the amount of rotation from the initial side to the terminal side. Probably the most familiar unit of angle measurement is the degree. One degree is \(\frac{1}{360}\) of a circular rotation, so a complete circular rotation contains 360 degrees. An angle measured in degrees should always include the unit “degrees” after the number, or include the degree symbol °. For example, 90 degrees = 90°.
To formalize our work, we will begin by drawing angles on an \(x\)-\(y\)- coordinate plane. Angles can occur in any position on the coordinate plane, but for the purpose of comparison, the convention is to illustrate them in the same position whenever possible. An angle is in standard position if its vertex is located at the origin, and its initial side extends along the positive \(x\)-axis. See Figure \(\PageIndex{5}\).
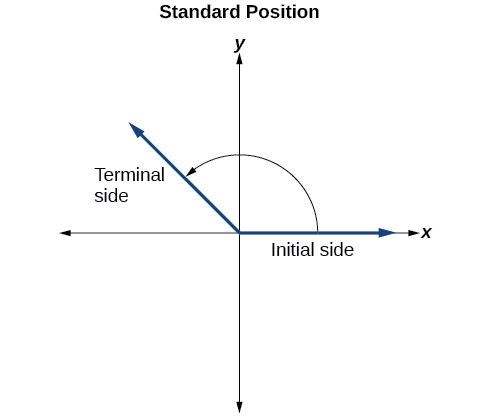
Figure \(\PageIndex{5}\)
If the angle is measured in a counterclockwise direction from the initial side to the terminal side, the angle is said to be a positive angle. If the angle is measured in a clockwise direction, the angle is said to be a negative angle.
Drawing an angle in standard position always starts the same way - draw the initial side along the positive \(x\)-axis. To place the terminal side of the angle, we must calculate the fraction of a full rotation the angle represents. We do that by dividing the angle measure in degrees by 360°. For example, to draw a 90° angle, we calculate that \(\frac{90°}{360°}=\frac{1}{4}\). So, the terminal side will be one-fourth of the way around the circle, moving counterclockwise from the positive \(x\)-axis. To draw a 360° angle, we calculate that \(\frac{360°}{360°}=1\). So the terminal side will be 1 complete rotation around the circle, moving counterclockwise from the positive \(x\)-axis. In this case, the initial side and the terminal side overlap. See Figure \(\PageIndex{6}\) .
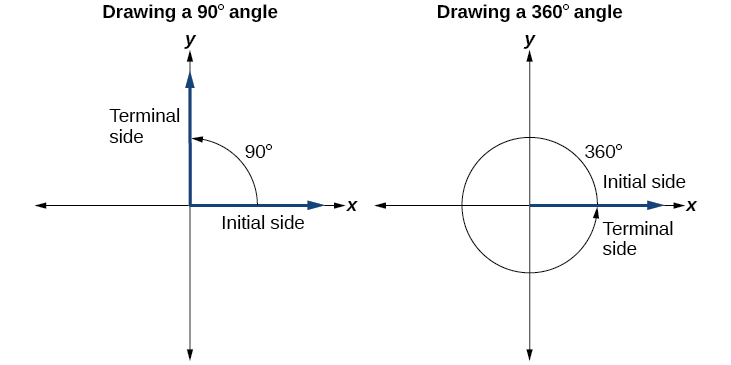
Figure \(\PageIndex{6}\)
Recall that the \(x\)- and \(y\)-axes divide the coordinate plane into four quarters called quadrants. We label these quadrants to mimic the direction a positive angle would sweep. The four quadrants are labeled I, II, III, and IV. We have a special type of angle in standard position whose terminal side lies on an axis, a quadrantal angle. This type of angle can have a measure of 0°, 90°, 180°, 270° or 360°. See Figure \(\PageIndex{7}\).
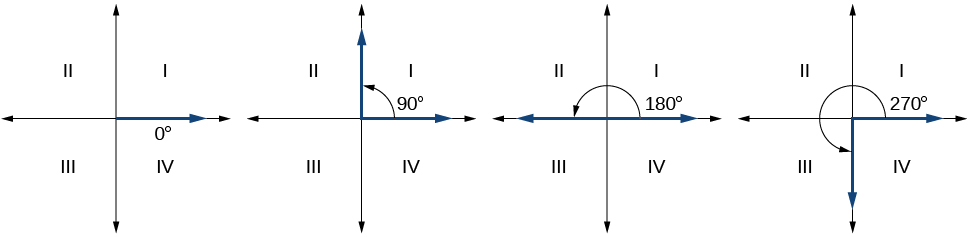
Figure \(\PageIndex{7}\): Quadrantal angles are angles in standard position whose terminal side lies along an axis.
QUADRANTAL ANGLES
Quadrantal angles are angles in standard position whose terminal side lies on an axis, including 0°, 90°, 180°, 270°, or 360°.
![]() Given an angle measure in degrees, draw the angle in standard position
Given an angle measure in degrees, draw the angle in standard position
- Express the angle measure as a fraction of 360°.
- Reduce the fraction to simplest form.
- Draw an angle that contains that same fraction of the circle, beginning on the positive \(x\)-axis and moving counterclockwise for positive angles and clockwise for negative angles.
Example \(\PageIndex{1}\): Drawing an Angle in Standard Position Measured in Degrees
- Sketch an angle of 30° in standard position.
- Sketch an angle of −135° in standard position.
Solution
- Divide the angle measure by 360°.
\[\dfrac{30°}{360°}=\dfrac{1}{12}\]
To rewrite the fraction in a more familiar fraction, we can recognize that
\[\dfrac{1}{12}=\dfrac{1}{3}(\frac{1}{4})\]
One-twelfth equals one-third of a quarter, so by dividing a quarter rotation into thirds, we can sketch a line at 30° as in Figure \(\PageIndex{8}\).
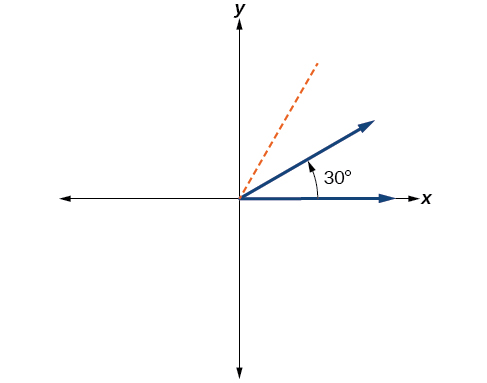
Figure \(\PageIndex{8}\) -
Divide the angle measure by 360°.
\[\dfrac{−135°}{360°}=−\dfrac{3}{8}\]
In this case, we can recognize that
\[−\dfrac{3}{8}=−\dfrac{3}{2}(\dfrac{1}{4})\]
Negative three-eighths is one and one-half times a quarter, so we place a line by moving clockwise one full quarter and one-half of another quarter, as in Figure \(\PageIndex{9}\).
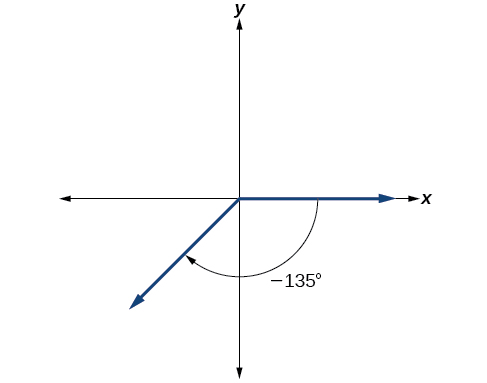
Figure \(\PageIndex{9}\)
![]() \(\PageIndex{1}\)
\(\PageIndex{1}\)
Show an angle of 240° on a circle in standard position.
- Answer
-
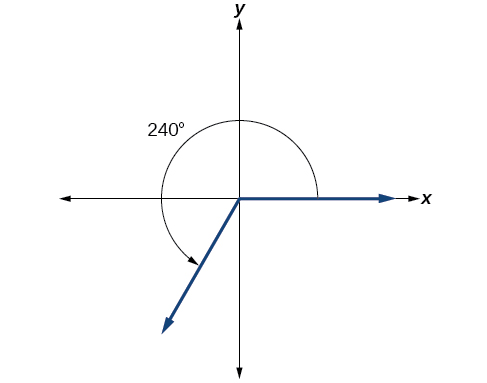
Figure \(\PageIndex{10}\)
Converting Between Degrees and Radians
Dividing a circle into 360 parts is an arbitrary choice, although it creates the familiar degree measurement. We may choose other ways to divide a circle. To find another unit, think of the process of drawing a circle. Imagine that you stop before the circle is completed. The portion that you drew is referred to as an arc. An arc may be a portion of a full circle, a full circle, or more than a full circle, represented by more than one full rotation. The length of the arc around an entire circle is called the circumference of that circle.
The circumference of a circle is \(C=2πr\). If we divide both sides of this equation by \(r\), we create the ratio of the circumference to the radius, which is always \(2π\) regardless of the length of the radius. So the circumference of any circle is \(2π≈6.28\) times the length of the radius. That means that if we took a string as long as the radius and used it to measure consecutive lengths around the circumference, there would be room for six full string-lengths and a little more than a quarter of a seventh string-length, as shown in Figure \(\PageIndex{11}\).
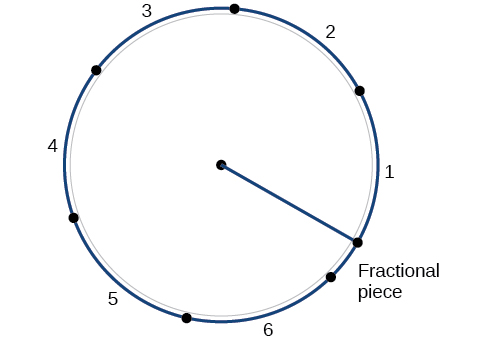
Figure \(\PageIndex{11}\)
This brings us to our new angle measure. One radian is the measure of a central angle of a circle that intercepts an arc equal in length to the radius of that circle. A central angle is an angle formed at the center of a circle by two radii. Because the total circumference equals \(2π\) times the radius, a full circular rotation is \(2π\) radians. So
\[\begin{align} 2π \text{ radians } & =360^∘ \\ π \text{ radians } & =\dfrac{360^∘}{2}=180^∘ \\ 1 \text{ radian } & =\dfrac{180^∘}{π}≈57.3^∘ \end{align}\]
See Figure \(\PageIndex{12}\). Note that when an angle is described without a specific unit, it refers to radian measure. For example, an angle measure of 3 indicates 3 radians. In fact, radian measure can be considered dimensionless, since it is the quotient of a length (circumference) divided by a length (radius) and the length units cancel out.
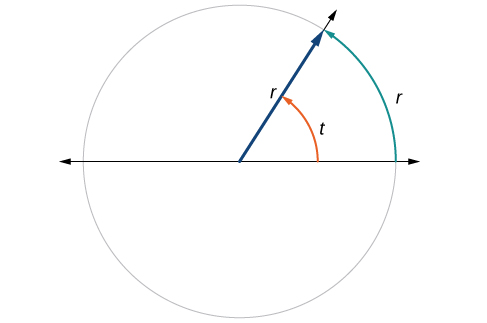
Figure \(\PageIndex{12}\): The angle \(t\) sweeps out a measure of one radian. Note that the length of the intercepted arc is the same as the length of the radius of the circle.
Relating Arc Lengths to Radius
An arc length \(s\) is the length of the curve along the arc. Just as the full circumference of a circle always has a constant ratio to the radius, the arc length produced by any given angle also has a constant relation to the radius, regardless of the length of the radius.
This ratio, called the radian measure, is the same regardless of the radius of the circle—it depends only on the angle. This property allows us to define a measure of any angle as the ratio of the arc length s s to the radius \(r\). See Figure \(\PageIndex{13}\).
\[\begin{align} s &=rθ \\ θ &=\dfrac{s}{r} \end{align}\]
If \( s=r\), then \(θ=\frac{r}{r}= 1 \text{ radian.}\)
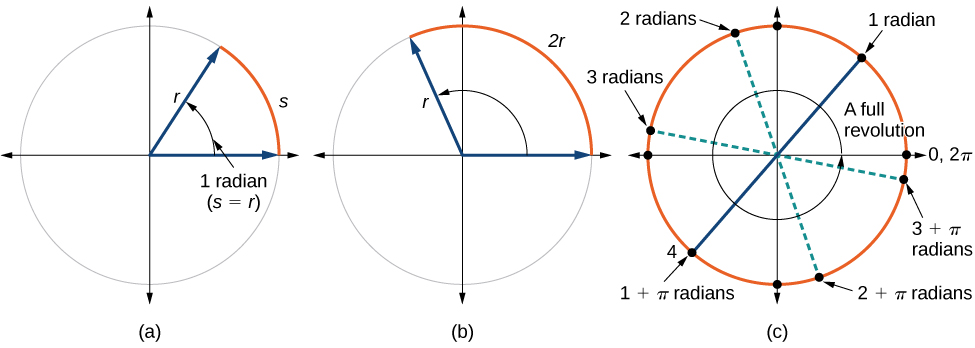
Figure \(\PageIndex{13}\): (a) In an angle of 1 radian, the arc length \(s\) equals the radius \(r.\) (b) An angle of 2 radians has an arc length \(s=2r\). (c) A full revolution is 2π or about 6.28 radians.
To elaborate on this idea, consider two circles, one with radius 2 and the other with radius 3. Recall the circumference of a circle is \(C=2πr\),where \(r\) is the radius. The smaller circle then has circumference \(2π(2)=4π\) and the larger has circumference \(2π(3)=6π\). Now we draw a 45° angle on the two circles, as in Figure \(\PageIndex{14}\).
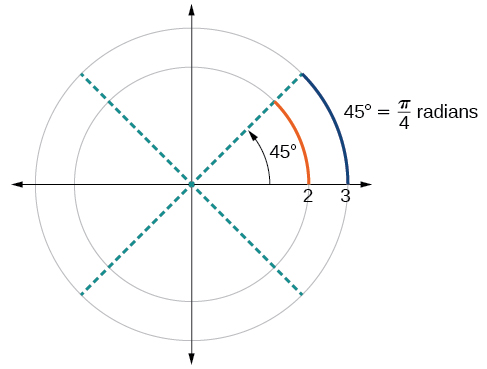
Figure \(\PageIndex{14}\): A 45° angle contains one-eighth of the circumference of a circle, regardless of the radius.
Notice what happens if we find the ratio of the arc length divided by the radius of the circle.
\[\begin{align} \text{Smaller circle: } \dfrac{\frac{1}{2}π}{2} & =\dfrac{1}{4}π \\[2mm] \text{Larger circle: } \dfrac{\frac{3}{4}π}{3} & =\dfrac{1}{4}π \end{align}\]
Since both ratios are \(\frac{1}{4}π\), the angle measures of both circles are the same, even though the arc length and radius differ.
definition: RADIANS
One radian is the measure of the central angle of a circle such that the length of the arc between the initial side and the terminal side is equal to the radius of the circle. A full revolution (360°) equals \(2\pi\) radians. A half revolution (180°) is equivalent to \(\pi\) radians.
The radian measure of an angle is the ratio of the length of the arc subtended by the angle to the radius of the circle. In other words, if \(s\) is the length of an arc of a circle, and \(r\) is the radius of the circle, then the central angle containing that arc measures \(\frac{s}{r}\) radians. In a circle of radius 1, the radian measure corresponds to the length of the arc.
![]() : A measure of 1 radian looks to be about 60°. Is that correct?
: A measure of 1 radian looks to be about 60°. Is that correct?
Yes. It is approximately 57.3°. Because \(2π\) radians equals 360°, \(1\) radian equals \(\frac{360°}{2π}≈57.3°\).
Using Radians
Because radian measure is the ratio of two lengths, it is a unitless measure. For example, in Figure \(\PageIndex{14}\), suppose the radius were 2 inches and we measured a distance along the arc of 2 inches as well. When we calculate the radian measure of the angle, the “inches” cancel, and we have a result without units. Therefore, it is not necessary to write the label “radians” after a radian measure, and if we see an angle that is not labeled with “degrees” or the degree symbol, we can assume that it is a radian measure.
Considering the most basic case, the unit circle (a circle with radius 1), we know that 1 rotation equals 360 degrees, 360°. We can also track one rotation around a circle by finding the circumference, \(C=2πr\), and for the unit circle \(C=2π.\) These two different ways to rotate around a circle give us a way to convert from degrees to radians.
\[\begin{array}{clll} 1 \text{ rotation} & =360° & =2π & \text{radians} \\[2mm] \dfrac{1}{2} \text{ rotation} & =180° & =π & \text{radians} \\[2mm] \dfrac{1}{4} \text{ rotation} & =90° & =\dfrac{π}{2} & \text{radians} \end{array}\]
Identifying Special Angles Measured in Radians
In addition to knowing the measurements in degrees and radians of a quarter revolution, a half revolution, and a full revolution, there are other frequently encountered angles in one revolution of a circle with which we should be familiar. It is common to encounter multiples of 30, 45, 60, and 90 degrees. These values are shown in Figure \(\PageIndex{15}\). Becoming familiar with these angles will be very useful as we study the properties associated with angles.
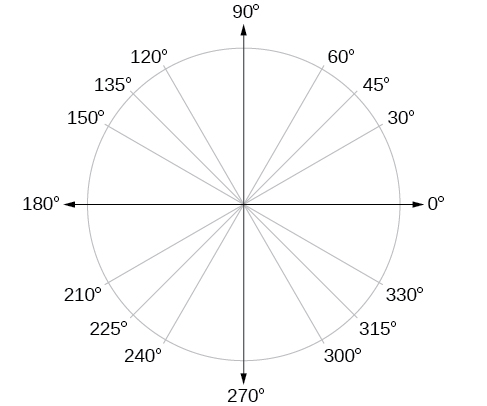
Figure \(\PageIndex{15}\): Commonly encountered angles measured in degrees
Now, we can list the corresponding radian values for the common measures of a circle corresponding to those listed in Figure \(\PageIndex{15}\), which are shown in Figure \(\PageIndex{16}\). Be sure you can verify each of these measures.
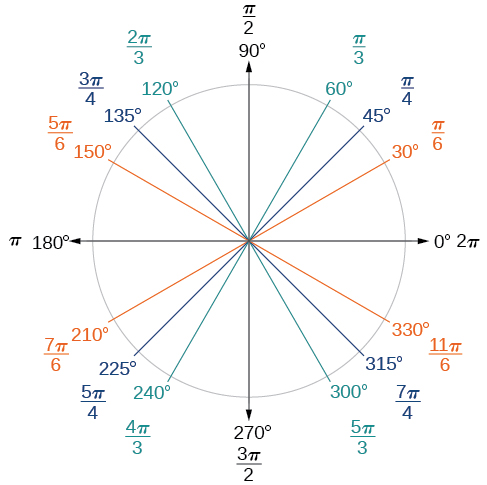
Figure \(\PageIndex{16}\): Commonly encountered angles measured in radians
Example \(\PageIndex{2}\): Finding a Radian Measure
Find the radian measure of one-third of a full rotation.
Solution
For any circle, the arc length along such a rotation would be one-third of the circumference. We know that
\[1 \text{ rotation}=2πr\]
So,
\[\begin{align}s &= \dfrac{1}{3}(2πr) \\[2mm] &=\dfrac{2πr}{3} \end{align}\]
The radian measure would be the arc length divided by the radius.
\[\begin{align} \text{radian measure} & = \dfrac{\frac{2πr}{3}}{r} \\[2mm] &= \dfrac{2πr}{3r} \\[2mm] & = \dfrac{2π}{3} \end{align}\]
![]() \(\PageIndex{2}\)
\(\PageIndex{2}\)
Find the radian measure of three-fourths of a full rotation.
- Answer
-
\(\dfrac{3\pi}{2}\)
Converting between Radians and Degrees
Because degrees and radians both measure angles, we need to be able to convert between them. We can easily do so using a proportion.
\[\dfrac{θ}{180}=\dfrac{θ^R}{π}\]
This proportion shows that the measure of angle \(θ\) in degrees divided by 180 equals the measure of angle \(θ\) in radians divided by \(π.\) Or, phrased another way, degrees is to 180 as radians is to \(π\).
\[\dfrac{\text{Degrees}}{180}=\dfrac{Radians}{π} \]
CONVERTING BETWEEN RADIANS AND DEGREES
To convert between degrees and radians, use the proportion
\[\dfrac{θ}{180}=\dfrac{θ^R}{π}\]
Example \(\PageIndex{3}\): Converting Radians to Degrees
Convert each radian measure to degrees.
- \(\frac{π}{6}\)
- 3
Solution
Because we are given radians and we want degrees, we should set up a proportion and solve it.
- We use the proportion, substituting the given information.
\[\begin{align}\dfrac{θ}{180} &=\dfrac{θ^R}{π} \\[2mm] \dfrac{θ}{180} & =\dfrac{\frac{π}{6}}{π} \\[2mm] θ & =\dfrac{180}{6} \\ θ & =30^∘ \end{align}\]
- We use the proportion, substituting the given information.
\[\begin{align}\dfrac{θ}{180} &= \dfrac{θ^R}{π} \\[2mm] \dfrac{θ}{180} &=\dfrac{3}{π} \\[2mm] θ &= \dfrac{3(180)}{π} \\ θ & ≈172^∘ \end{align}\]
![]() \(\PageIndex{3}\)
\(\PageIndex{3}\)
Convert \(−\frac{3π}{4}\) radians to degrees.
- Answer
-
−135°
Example \(\PageIndex{4}\): Converting Degrees to Radians
Convert \(15\) degrees to radians.
Solution
In this example, we start with degrees and want radians, so we again set up a proportion and solve it, but we substitute the given information into a different part of the proportion.
\[\begin{align}\dfrac{θ}{180} &= \dfrac{θ^R}{π} \\ \dfrac{15}{180} &=\dfrac{θ^R}{π} \\ \dfrac{15π}{180} & =θ^R \\ \dfrac{π}{12} & =θ^R \end{align}\]
Analysis
Another way to think about this problem is by remembering that \(30^∘=\frac{π}{6}\). Because \(15^∘=\frac{1}{2}(30^∘)\), ,we can find that \(\frac{1}{2}(\frac{π}{6})\) is \(\frac{π}{12}\).
![]() \(\PageIndex{4}\)
\(\PageIndex{4}\)
Convert 126° to radians.
- Answer
-
\(\frac{7π}{10}\)
Finding Coterminal Angles
Converting between degrees and radians can make working with angles easier in some applications. For other applications, we may need another type of conversion. Negative angles and angles greater than a full revolution are more awkward to work with than those in the range of 0° to 360°, or 0 to \(2π\). It would be convenient to replace those out-of-range angles with a corresponding angle within the range of a single revolution.
It is possible for more than one angle to have the same terminal side. Look at Figure \(\PageIndex{17}\). The angle of 140° is a positive angle, measured counterclockwise. The angle of –220° is a negative angle, measured clockwise. But both angles have the same terminal side. If two angles in standard position have the same terminal side, they are coterminal angles. Every angle greater than 360° or less than 0° is coterminal with an angle between 0° and 360°, and it is often more convenient to find the coterminal angle within the range of 0° to 360° than to work with an angle that is outside that range.
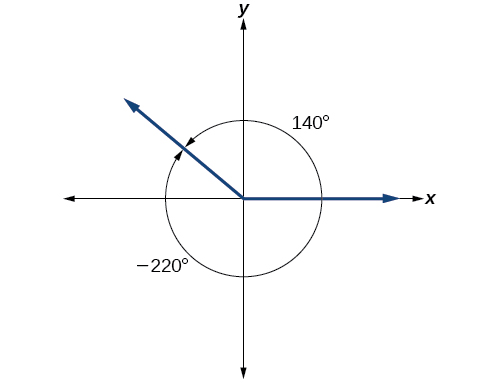
Figure \(\PageIndex{17}\): An angle of 140° and an angle of –220° are coterminal angles.
Any angle has infinitely many coterminal angles because each time we add 360° to that angle—or subtract 360° from it—the resulting value has a terminal side in the same location. For example, 100° and 460° are coterminal for this reason, as is −260°. Recognizing that any angle has infinitely many coterminal angles explains the repetitive shape in the graphs of trigonometric functions.
An angle’s reference angle is the measure of the smallest acute angle \(t\) formed by the terminal side of the angle \(t\) and the horizontal axis. (Acute angles are angles between \(0°\) and \(90°\).) Acute angles in standard position have terminal sides that lie in the first quadrant and are their own reference angles. They can be used as models for angles in other quadrants. See Figure \(\PageIndex{18}\) for examples of reference angles for angles in different quadrants. Note that reference angles are not generally in standard position. We will make use of reference angles in Section 5.2.
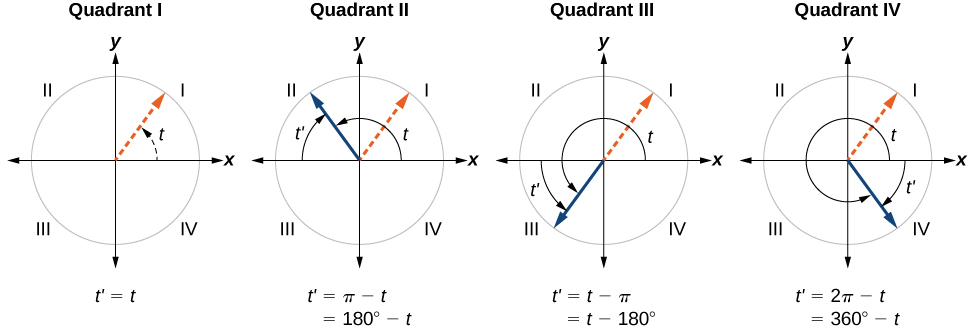
Figure \(\PageIndex{18}\)
definition: COTERMINAL AND REFERENCE ANGLES
- Coterminal angles are two angles in standard position that have the same terminal side.
- An angle’s reference angle is the size of the smallest acute angle, \(t′\), formed by the terminal side of the angle \(t\) and the horizontal axis.
![]() Given an angle greater than 360°, find a coterminal angle between 0° and 360°
Given an angle greater than 360°, find a coterminal angle between 0° and 360°
- Subtract 360° from the given angle.
- If the result is still greater than 360°, subtract 360° again till the result is between 0° and 360°.
- The resulting angle is coterminal with the original angle.
Example \(\PageIndex{5}\): Finding an Angle Coterminal with an Angle of Measure Greater Than 360°
Find the least positive angle θ that is coterminal with an angle measuring 800°, where \(0°≤θ<360°\).
Solution
An angle with measure 800° is coterminal with an angle with measure 800 − 360 = 440°, but 440° is still greater than 360°, so we subtract 360° again to find another coterminal angle: 440 − 360 = 80°.
The angle \(θ=80°\) is coterminal with 800°. To put it another way, 800° equals 80° plus two full rotations, as shown in Figure \(\PageIndex{19}\).
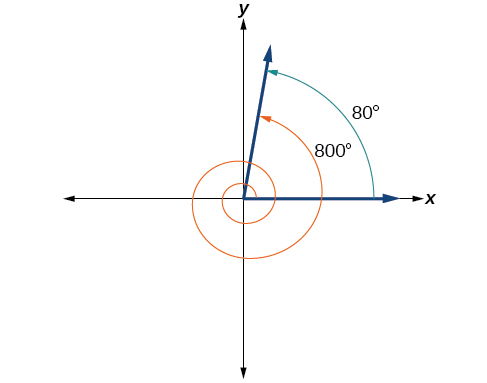
Figure \(\PageIndex{19}\)
![]() \(\PageIndex{5}\)
\(\PageIndex{5}\)
Find an angle \(α\) that is coterminal with an angle measuring 870°, where \(0°≤α<360°\).
- Answer
-
\(\alpha=150°\)
![]() Given an angle with measure less than 0°, find a coterminal angle having a measure between 0° and 360°.
Given an angle with measure less than 0°, find a coterminal angle having a measure between 0° and 360°.
- Add 360° to the given angle.
- If the result is still less than 0°, add 360° again until the result is between 0° and 360°.
- The resulting angle is coterminal with the original angle.
Example \(\PageIndex{6}\): Finding an Angle Coterminal with an Angle Measuring Less Than 0°
Show the angle with measure −45° on a circle and find a positive coterminal angle α such that 0° ≤ α < 360°.
Solution
Since 45° is half of 90°, we can start at the positive horizontal axis and measure clockwise half of a 90° angle.
Because we can find coterminal angles by adding or subtracting a full rotation of 360°, we can find a positive coterminal angle here by adding 360°:
\[−45°+360°=315°\]
We can then show the angle on a circle, as in Figure \(\PageIndex{20}\).
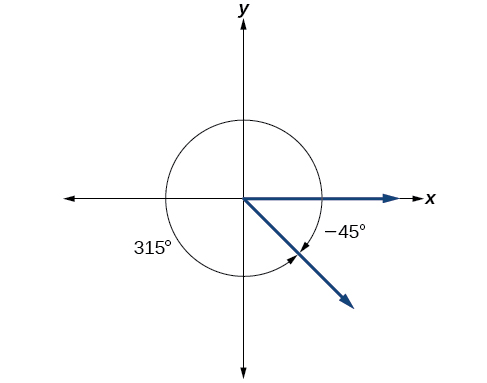
Figure \(\PageIndex{20}\)
![]() \(\PageIndex{6}\)
\(\PageIndex{6}\)
Find an angle β that is coterminal with an angle measuring −300° such that \(0°≤β<360°\).
- Answer
-
\(β =60°\)
Finding Coterminal Angles Measured in Radians
We can find coterminal angles measured in radians in much the same way as we have found them using degrees. In both cases, we find coterminal angles by adding or subtracting one or more full rotations.
![]() Given an angle greater than \(2\pi\), find a coterminal angle between 0 and \(2\pi\).
Given an angle greater than \(2\pi\), find a coterminal angle between 0 and \(2\pi\).
- Subtract \(2π\) from the given angle.
- If the result is still greater than \(2π\), subtract \(2π\) again until the result is between \(0\) and \(2π\).
- The resulting angle is coterminal with the original angle.
Example \(\PageIndex{7}\): Finding Coterminal Angles Using Radians
Find an angle \(β\) that is coterminal with \(\frac{19π}{4}\), where \(0≤β<2π.\)
Solution
When working in degrees, we found coterminal angles by adding or subtracting 360 degrees, a full rotation. Likewise, in radians, we can find coterminal angles by adding or subtracting full rotations of \(2π\) radians:
\[\begin{align} \dfrac{19π}{4}−2π & =\dfrac{19π}{4}−\dfrac{8π}{4} \\ &=\dfrac{11π}{4} \end{align}\]
The angle \(\frac{11π}{4}\) is coterminal, but not less than \(2π\), so we subtract another rotation:
\[\begin{align} \dfrac{11π}{4}−2π &= \dfrac{11π}{4}−\dfrac{8π}{4} \\ &= \dfrac{3π}{4} \end{align}\]
The angle \(\frac{3π}{4}\) is coterminal with \(\frac{19π}{4}\), as shown in Figure \(\PageIndex{21}\).
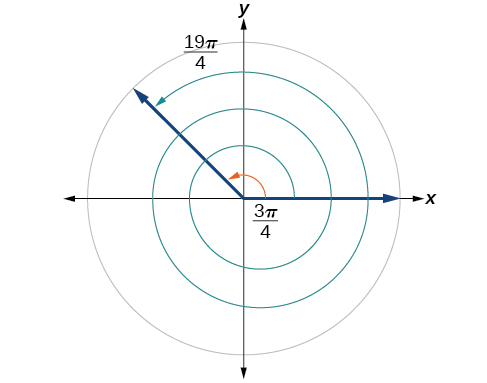
Figure \(\PageIndex{21}\)
![]() \(\PageIndex{7}\)
\(\PageIndex{7}\)
Find an angle of measure \(θ\) that is coterminal with an angle of measure \(−\frac{17π}{6}\) where \(0≤θ<2π.\)
- Answer
-
\(\frac{7π}{6}\)
Determining the Length of an Arc
Recall that the radian measure \(θ\) of an angle was defined as the ratio of the arc length \(s\) of a circular arc to the radius \(r\) of the circle, \(θ=\frac{s}{r}\). From this relationship, we can find arc length along a circle, given an angle.
ARC LENGTH ON A CIRCLE
In a circle of radius r, the length of an arc \(s\) subtended by an angle with measure \(θ\) in radians, shown in Figure \(\PageIndex{22}\), is
\[s=rθ\]
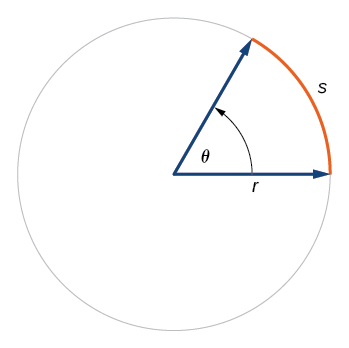
Figure \(\PageIndex{22}\)
![]() Given a circle of radius \(r,\) calculate the length \(s\) of the arc subtended by a given angle of measure \(θ\).
Given a circle of radius \(r,\) calculate the length \(s\) of the arc subtended by a given angle of measure \(θ\).
- If necessary, convert \(θ\) to radians.
- Multiply the radius \(r\) by the radian measure of \(θ:s=rθ\).
Example \(\PageIndex{8}\): Finding the Length of an Arc
Assume the orbit of Mercury around the sun is a perfect circle. Mercury is approximately 36 million miles from the sun.
- In one Earth day, Mercury completes 0.0114 of its total revolution. How many miles does it travel in one day?
- Use your answer from part (a) to determine the radian measure for Mercury’s movement in one Earth day.
- In Earth days, how long is Mercury's year?
Solution
- Let’s begin by finding the circumference of Mercury’s orbit.
\[\begin{align} C &=2πr \\ &=2π(\text{36 million miles}) \\ &≈226 \text{ million miles} \end{align}\]
Since Mercury completes 0.0114 of its total revolution in one Earth day, we can now find the distance traveled:
\[(0.0114)226 \text{ million miles} = 2.58 \text{ million miles}\]
- Now, we convert to radians:
\[\begin{align} \text{radian} & = \dfrac{\text{arc length}}{\text{radius}} \\ &= \dfrac{2.58 \text{ million miles}}{36 \text{ million miles}} \\ & =0.0717 \end{align} \]
-
A year is the length of time it takes for the planet to make one full revolution around the sun; in other words, to travel through a radian measure of \(2\pi\). We can divide \(2\pi\) by \(0.0717\) to get \(\dfrac{2\pi}{0.0717} \approx 87.63\) Earth days.
![]() \(\PageIndex{8}\)
\(\PageIndex{8}\)
Find the arc length along a circle of radius 10 units subtended by an angle of 215°.
- Answer
-
\(\dfrac{215π}{18}=37.525 \text{ units} \)
Finding the Area of a Sector of a Circle
In addition to arc length, we can also use angles to find the area of a sector of a circle. A sector is a region of a circle bounded by two radii and the intercepted arc, like a slice of pizza or pie. Recall that the area of a circle with radius \(r\) can be found using the formula \(A=πr^2\). If the two radii form an angle of \(θ\), measured in radians, then \(\frac{θ}{2π}\) is the ratio of the angle measure to the measure of a full rotation and is also, therefore, the ratio of the area of the sector to the area of the circle. Thus, the area of a sector is the fraction \(\frac{θ}{2π}\) multiplied by the entire area. (Always remember that this formula only applies if \(θ\) is in radians.)
\[\begin{align} \text{Area of sector} & =\left(\dfrac{θ}{2π}\right)πr^2 \\ &=\dfrac{θπr^2}{2π} \\ & =\dfrac{1}{2}θr^2 \end{align}\]
AREA OF A SECTOR
The area of a sector of a circle with radius \(r\) subtended by an angle \(θ\), measured in radians, is
\[A=\dfrac{1}{2}θr^2\]
See Figure \(\PageIndex{23}\).
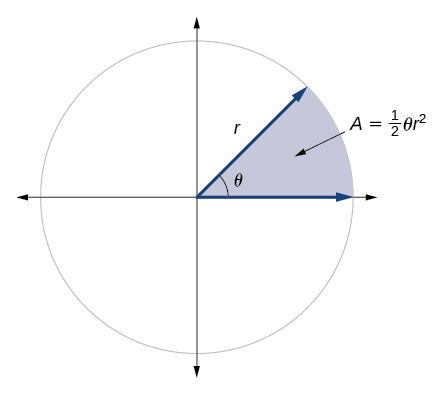
Figure \(\PageIndex{23}\): The area of the sector equals half the square of the radius times the central angle measured in radians.
![]() Given a circle of radius \(r,\) find the area of a sector defined by a given angle \(θ.\)
Given a circle of radius \(r,\) find the area of a sector defined by a given angle \(θ.\)
- If necessary, convert \(θ\) to radians.
- Multiply half the radian measure of \(θ\) by the square of the radius \(r: A=\frac{1}{2}θr^2.\)
Example \(\PageIndex{9}\): Finding the Area of a Sector
An automatic lawn sprinkler sprays a distance of 20 feet while rotating 30 degrees, as shown in Figure \(\PageIndex{24}\). What is the area of the sector of grass the sprinkler waters?
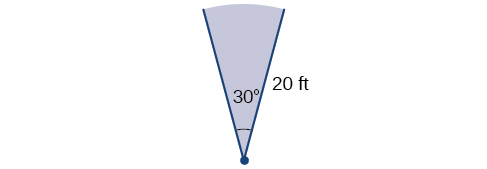
Figure \(\PageIndex{24}\): The sprinkler sprays 20 ft within an arc of 30°.
Solution
First, we need to convert the angle measure into radians. Because 30 degrees is one of our special angles, we already know the equivalent radian measure, but we can also convert:
\[\begin{align} \text{30 degrees} &=30⋅\frac{π}{180} \\ &=\frac{π}{6} \text{ radians} \end{align}\]
The area of the sector is then
\[\begin{align} \text{Area} &= \dfrac{1}{2}(\dfrac{π}{6})(20)^2 \\ & ≈104.72 \end{align}\]
So the area is about \(\mathrm{104.72 \; ft^2}\).
![]() \(\PageIndex{9}\)
\(\PageIndex{9}\)
In central pivot irrigation, a large irrigation pipe on wheels rotates around a center point. A farmer has a central pivot system with a radius of 400 meters. If water restrictions only allow her to water 150 thousand square meters a day, what angle should she set the system to cover? Write the answer in radian measure to two decimal places.
- Answer
-
1.88
Use Linear and Angular Speed to Describe Motion on a Circular Path
In addition to finding the area of a sector, we can use angles to describe the speed of a moving object. An object traveling in a circular path has two types of speed. Linear speed is speed along a straight path and can be determined by the distance it travels (its displacement) in a given time interval. For instance, if a wheel with radius 5 inches rotates once a second, a point on the edge of the wheel moves a distance equal to the circumference, or 10π inches, every second. So the linear speed of the point is \(10π\) in/s. The equation for linear speed is as follows, where \(v\) is linear speed, \(s\) is displacement, and \(t\) is time.
\[v=\dfrac{s}{t}\]
Angular speed results from circular motion and can be determined by the angle through which a point rotates in a given time interval. In other words, angular speed is angular rotation per unit time. So, for instance, if a gear makes a full rotation every 4 seconds, we can calculate its angular speed as \(\frac{360 \text{ degrees}}{4 \text{ seconds}}= \) 90 degrees per second. Angular speed can be given in radians per second, rotations per minute, or degrees per hour for example. The equation for angular speed is as follows, where \(ω\) (read as omega) is angular speed, \(θ\) is the angle traversed, and \(t\) is time.
\[ω=\dfrac{θ}{t}\]
Combining the definition of angular speed with the arc length equation, \(s=rθ\), we can find a relationship between angular and linear speeds. The angular speed equation can be solved for \(θ\), giving \(θ=ωt.\) Substituting this into the arc length equation gives:
\[\begin{align}s &=rθ \\ &=rωt \end{align}\]
Substituting this into the linear speed equation gives:
\[\begin{align} v & = \dfrac{s}{t} &=\dfrac{rωt}{t} &=rω \end{align}\]
definition: ANGULAR AND LINEAR SPEED
As a point moves along a circle of radius \(r,\) its angular speed, \(ω\), is the angular rotation \(θ\) per unit time, \(t\).
\[ω=\dfrac{θ}{t}\]
The linear speed. \(v\), of the point can be found as the distance traveled, arc length \(s\), per unit time, \(t.\)
\[v=\frac{s}{t}\]
When the angular speed is measured in radians per unit time, linear speed and angular speed are related by the equation
\[v=rω\]
This equation states that the angular speed in radians, \(ω\), representing the amount of rotation occurring in a unit of time, can be multiplied by the radius \(r\) to calculate the total arc length traveled in a unit of time, which is the definition of linear speed.
![]() Given the amount of angle rotation and the time elapsed, calculate the angular speed
Given the amount of angle rotation and the time elapsed, calculate the angular speed
- If necessary, convert the angle measure to radians.
- Divide the angle in radians by the number of time units elapsed: \(ω=\frac{θ}{t}.\)
- The resulting speed will be in radians per time unit.
Example \(\PageIndex{10}\): Finding Angular Speed
A water wheel, shown in Figure \(\PageIndex{25}\), completes 1 rotation every 5 seconds. Find the angular speed in radians per second.
Figure \(\PageIndex{25}\)
Solution
The wheel completes 1 rotation, or passes through an angle of \(2π\) radians in 5 seconds, so the angular speed would be \(ω=\frac{2π}{5}≈1.257\) radians per second.
![]() \(\PageIndex{10}\)
\(\PageIndex{10}\)
An old vinyl record is played on a turntable rotating clockwise at a rate of 45 rotations per minute. Find the angular speed in radians per second.
- Answer
-
\(−\frac{3π}{2}\) rad/s
![]() Given the radius of a circle, an angle of rotation, and a length of elapsed time, determine the linear speed
Given the radius of a circle, an angle of rotation, and a length of elapsed time, determine the linear speed
- Convert the total rotation to radians if necessary.
- Divide the total rotation in radians by the elapsed time to find the angular speed: apply \(ω=\frac{θ}{t}\).
- Multiply the angular speed by the length of the radius to find the linear speed, expressed in terms of the length unit used for the radius and the time unit used for the elapsed time: apply \(v=rω\).
Example \(\PageIndex{11}\): Finding a Linear Speed
A bicycle has wheels 28 inches in diameter. A tachometer determines the wheels are rotating at 180 RPM (revolutions per minute). Find the speed the bicycle is traveling down the road.
Solution
The linear speed of the outside of the tires is the speed at which the bicycle travels down the road. Here, we have an angular speed and need to find the corresponding linear speed.
We begin by converting from rotations per minute to radians per minute. It can be helpful to utilize the units (dimensional analysis) to make this conversion:
\[\mathrm{180 \dfrac{\cancel{rotations}}{minute}⋅\dfrac{2π \; radians}{\cancel{rotation}}=360π\dfrac{radians}{minute}}\]
Using the formula from above along with the radius of the wheels, we can find the linear speed:
\[\begin{align} v & =(14 \text{ inches})(360π \dfrac{\text{radians}}{\text{minute}}) \\ &=5040π \dfrac{\text{inches}}{\text{minute}} \end{align}\]
Remember that radians are a unitless measure, so it is not necessary to include them.
Finally, we may wish to convert this linear speed into a more familiar measurement, like miles per hour. Again, we use dimensional analysis to help with the conversion.
\[\mathrm{5040π\dfrac{\cancel{inches}}{\cancel{minute}}⋅\dfrac{1 \; \cancel{ feet}}{12 \; \cancel{ inches}}⋅\dfrac{1 \mbox{ mile}}{5280 \cancel{ feet}}⋅\dfrac{60 \cancel{ minutes}}{1 \; hour}≈14.99 \; miles \; per \; hour \; (mph)}\]
![]() \(\PageIndex{11}\)
\(\PageIndex{11}\)
A satellite is rotating around Earth at 0.25 radians per hour at an altitude of 242 km above Earth. If the radius of Earth is 6378 kilometers, find the linear speed of the satellite in kilometers per hour.
- Answer
-
1655 kilometers per hour
Media
Access these online resources for additional instruction and practice with angles, arc length, and areas of sectors.
Key Equations
| arc length | \(s=rθ\) |
| area of a sector | \(A=\frac{1}{2}θr^2\) |
| angular speed | \(ω=\frac{θ}{t}\) |
| linear speed | \(v=\frac{s}{t}\) |
| linear speed related to angular speed | \(v=rω\) |
Key Concepts
- An angle is formed from the union of two rays, by keeping the initial side fixed and rotating the terminal side. The amount of rotation determines the measure of the angle.
- An angle is in standard position if its vertex is at the origin and its initial side lies along the positive x-axis. A positive angle is measured counterclockwise from the initial side and a negative angle is measured clockwise.
- To draw an angle in standard position, draw the initial side along the positive x-axis and then place the terminal side according to the fraction of a full rotation the angle represents. See Example.
- In addition to degrees, the measure of an angle can be described in radians. See Example.
- To convert between degrees and radians, use the proportion \(\frac{θ}{180}=\frac{θ^R}{π}\). See Example and Example.
- Two angles that have the same terminal side are called coterminal angles.
- We can find coterminal angles by adding or subtracting 360° or \(2π\). See Example and Example.
- Coterminal angles can be found using radians just as they are for degrees. See Example.
- The length of a circular arc is a fraction of the circumference of the entire circle. See Example.
- The area of sector is a fraction of the area of the entire circle. See Example.
- An object moving in a circular path has both linear and angular speed.
- The angular speed of an object traveling in a circular path is the measure of the angle through which it turns in a unit of time. See Example.
- The linear speed of an object traveling along a circular path is the distance it travels in a unit of time. See Example.
Glossary
- angle
- the union of two rays having a common endpoint
- angular speed
- the angle through which a rotating object travels in a unit of time
- arc length
- the length of the curve formed by an arc
- area of a sector
- area of a portion of a circle bordered by two radii and the intercepted arc; the fraction \(\frac{θ}{2π}\) multiplied by the area of the entire circle
- coterminal angles
- description of positive and negative angles in standard position sharing the same terminal side
- degree
- a unit of measure describing the size of an angle as one-360th of a full revolution of a circle
- initial side
- the side of an angle from which rotation begins
- linear speed
- the distance along a straight path a rotating object travels in a unit of time; determined by the arc length
- measure of an angle
- the amount of rotation from the initial side to the terminal side
- negative angle
- description of an angle measured clockwise from the positive x-axis
- positive angle
- description of an angle measured counterclockwise from the positive x-axis
- quadrantal angle
- an angle whose terminal side lies on an axis
- radian measure
- the ratio of the arc length formed by an angle divided by the radius of the circle
- radian
- the measure of a central angle of a circle that intercepts an arc equal in length to the radius of that circle
- ray
- one point on a line and all points extending in one direction from that point; one side of an angle
- reference angle
- the measure of the acute angle formed by the terminal side of the angle and the horizontal axis
- standard position
- the position of an angle having the vertex at the origin and the initial side along the positive x-axis
- terminal side
- the side of an angle at which rotation ends
- vertex
- the common endpoint of two rays that form an angle
Contributors
Jay Abramson (Arizona State University) with contributing authors. Textbook content produced by OpenStax College is licensed under a Creative Commons Attribution License 4.0 license. Download for free at https://openstax.org/details/books/precalculus.