
Chapter 6: Triangles and Circles



- Last updated
- Dec 24, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Circles and triangles are the most straightforward geometric figures. A circle is the simplest curve, and a triangle is the simplest polygon - the one with the fewest sides. Each has properties that make it useful in many fields of endeavor. A triangle is the most stable polygon because once its sides are fixed in length, its angles cannot change. A triangular truss bridge is a stable structure. A three-legged stool will not wobble.

A circle encloses more area than any figure of the same length or perimeter, and a sphere encloses more space. A geodesic dome is a portion of a sphere constructed with triangles. It has been called "the strongest, lightest, and most efficient means of enclosing space known to man."
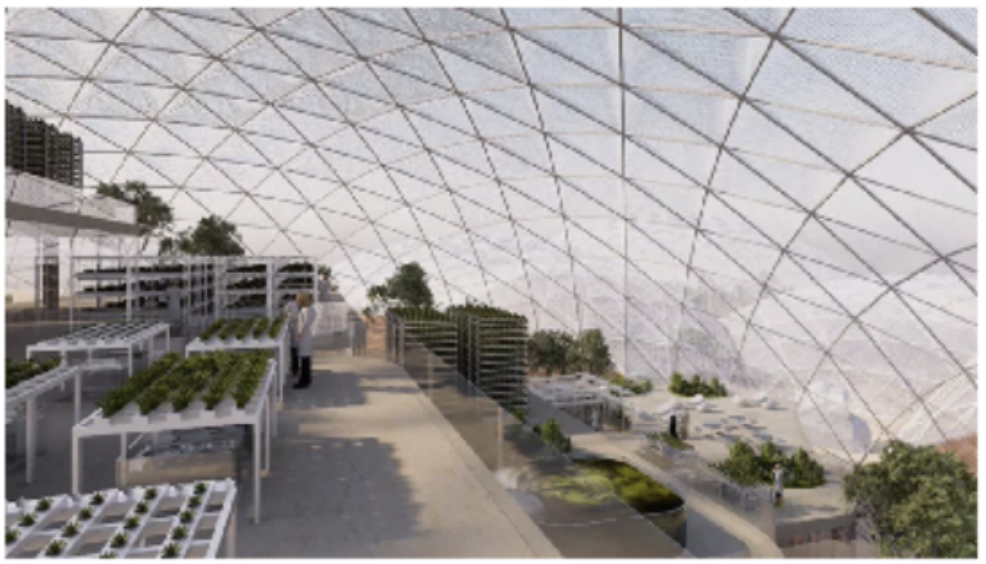
Geodesic domes may also help us learn how to live on another planet. In 2017, the United Arab Emirates began construction on Mars Science City, a series of interconnecting geodesic domes designed to be a realistic model for living on Mars. The city will cover 1.9 million (1.9×106) square feet, and its walls will be 3D-printed using sand from the desert.

The city will contain laboratories to address food, sustainability, and energy issues worldwide. Finally, the project will implement an experiment where a team will spend a year living on the simulated planet.
- Materials
- You will need paper and pencil, scissors, a ruler and compass, and two plastic straws.
- Prepare
- Cut the straw into pieces of length 2 inches, 3 inches, and 6 inches. Use the ruler to draw a large triangle and cut it out.
- What do we know about the sides of a triangle?
-
- Can you make a triangle with sides of length 2 inches, 3 inches, and 6 inches?
- Use the pieces of length 2 inches and 3 inches to form two sides of a triangle. What happens to the length of the third side as you increase the angle between the first two sides?
- What is the longest that the third side could be? What is the smallest?
- Two sides of a triangle are 6 centimeters and 8 centimeters long. What are the possible lengths of the third side?
- Two sides of a triangle are p units and q units long. What are the possible lengths of the third side?
-
- What do we know about the angles of a triangle?
- Use a protractor to measure the three angles of the paper triangle in degrees. Now, add up the three angles. What is their sum?
- Tear off the three corners of the triangle. Place them side-by-side with their vertices (tips) at the same point. What do you find?
- How are your answers to parts (1) and (2) related?
- How are the sides and angles of a triangle related?
- A standard way to label a triangle is to call the angles A,B, and C. The side opposite angle A is called a, the side opposite angle B is called b, and the side opposite angle C is called c. Sketch a triangle and label it with standard notation.
- Using a ruler, carefully draw a triangle and label it with standard notation so that a>b>c. Now, use a protractor to measure the angles and list them from largest to smallest. What do you observe?
- Using a ruler, carefully draw another triangle and label it with standard notation so that A>B>C. Now, use a ruler to measure the sides and list them in order from largest to smallest. What do you observe?
- What do we know about right triangles?
- The hypotenuse is the side opposite the 90∘ angle in a right triangle. Why is the hypotenuse always the longest side of a right triangle?
- The Pythagorean Theorem states the following:
IF: a,b, and c are the sides of a right triangle, and c is the hypotenuse a2+b2=c2
THEN: a2+b2=c2
The "if" part of the theorem is called the hypothesis, and the "then" part is called the conclusion. The converse of a theorem is the new statement you obtain when you interchange the hypothesis and the conclusion. Write the converse of the Pythagorean Theorem. - The converse of the Pythagorean Theorem is also true.1 Use the converse to decide whether each of the following triangles is a right triangle. Support your conclusions with calculations.
- a=9,b=16,c=25
- a=12,b=16,c=20
- a=√8,b=√5,c=√13
- a=√32,b=12,c=1
1 In general, the converse of a theorem is not necessarily true. For example, someone might say, "If it is raining, it must be cloudy." While this is true, the converse, "If it is cloudy, then it must be raining," is not necessarily true. A theorem in which the converse is also true is called a bijection (but most students know this as an "if and only if").
- 6.1: Angles and Basic Geometry
- Before jumping into Trigonometry, we need to build a solid foundation. This section provides the fundamental building blocks for working with the most basic quantity in Trigonometry - the angle. We delve into as much detail about angles as we dare, without introducing unnecessary topics. We cover a little bit of required Geometry for success in Trigonometry, and wrap things up with a brief geometric review of circles (another foundational topic for Trigonometry).
- 6.2: Triangles
- In this section, you will delve into triangles, exploring key concepts like the Triangle Sum Theorem, classifications based on angles and sides, and the significance of the Pythagorean Theorem. Special focus is given to special right triangles and their properties, enriched with practical examples and checkpoints to solidify understanding. This foundational knowledge sets the stage for deeper exploration of Trigonometry.
- 6.3: Similar Triangles
- This section focuses on similar triangles, highlighting their definition, congruence, and applications. It introduces the concept of similarity, demonstrates how to identify similar triangles through examples, and explores their properties, including proportional sides and angles. Key topics include using proportions to solve problems involving similar triangles, understanding similar right triangles, and dealing with overlapping triangles.
- 6.4: Lines, Circles, and Angles in the Rectangular Coordinate System
- This section introduces lines, circles, and angles within the rectangular coordinate system, focusing on the calculation and interpretation of slopes, equations of lines, the distance formula, and the equation of a circle. It also explores angles in the Cartesian coordinate system, covering quadrants, angles in standard position, and coterminal angles. This foundation is critical for understanding Trigonometry's broader concepts, with practical examples and checkpoints to ensure comprehension.