
12.7: Cylindrical and Spherical Coordinates
- Page ID
- 20195
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Convert from cylindrical to rectangular coordinates.
- Convert from rectangular to cylindrical coordinates.
- Convert from spherical to rectangular coordinates.
- Convert from rectangular to spherical coordinates.
The Cartesian coordinate system provides a straightforward way to describe the location of points in space. Some surfaces, however, can be difficult to model with equations based on the Cartesian system. This is a familiar problem; recall that in two dimensions, polar coordinates often provide a useful alternative system for describing the location of a point in the plane, particularly in cases involving circles. In this section, we look at two different ways of describing the location of points in space, both of them based on extensions of polar coordinates. As the name suggests, cylindrical coordinates are useful for dealing with problems involving cylinders, such as calculating the volume of a round water tank or the amount of oil flowing through a pipe. Similarly, spherical coordinates are useful for dealing with problems involving spheres, such as finding the volume of domed structures.
Cylindrical Coordinates
When we expanded the traditional Cartesian coordinate system from two dimensions to three, we simply added a new axis to model the third dimension. Starting with polar coordinates, we can follow this same process to create a new three-dimensional coordinate system, called the cylindrical coordinate system. In this way, cylindrical coordinates provide a natural extension of polar coordinates to three dimensions.
In the cylindrical coordinate system, a point in space (Figure \(\PageIndex{1}\)) is represented by the ordered triple \((r,θ,z)\), where
- \((r,θ)\) are the polar coordinates of the point’s projection in the \(xy\)-plane
- \(z\) is the usual \(z\)-coordinate in the Cartesian coordinate system
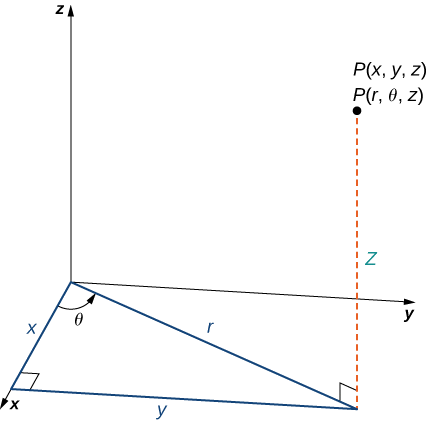
In the \(xy\)-plane, the right triangle shown in Figure \(\PageIndex{1}\) provides the key to transformation between cylindrical and Cartesian, or rectangular, coordinates.
The rectangular coordinates \((x,y,z)\) and the cylindrical coordinates \((r,θ,z)\) of a point are related as follows:
These equations are used to convert from cylindrical coordinates to rectangular coordinates.
- \(x=r\cos θ\)
- \(y=r\sin θ\)
- \(z=z\)
These equations are used to convert from rectangular coordinates to cylindrical coordinates
- \(r^2=x^2+y^2\)
- \(\tan θ=\dfrac{y}{x}\)
- \(z=z\)
As when we discussed conversion from rectangular coordinates to polar coordinates in two dimensions, it should be noted that the equation \(\tan θ=\dfrac{y}{x}\) has an infinite number of solutions. However, if we restrict \(θ\) to values between \(0\) and \(2π\), then we can find a unique solution based on the quadrant of the \(xy\)-plane in which original point \((x,y,z)\) is located. Note that if \(x=0\), then the value of \(θ\) is either \(\dfrac{π}{2},\dfrac{3π}{2},\) or \(0\), depending on the value of \(y\).
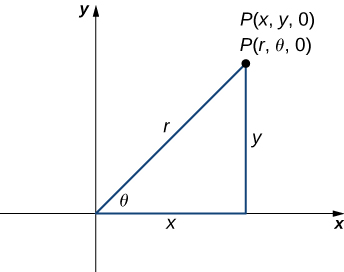
Notice that these equations are derived from properties of right triangles. To make this easy to see, consider point \(P\) in the \(xy\)-plane with rectangular coordinates \((x,y,0)\) and with cylindrical coordinates \((r,θ,0)\), as shown in Figure \(\PageIndex{2}\).
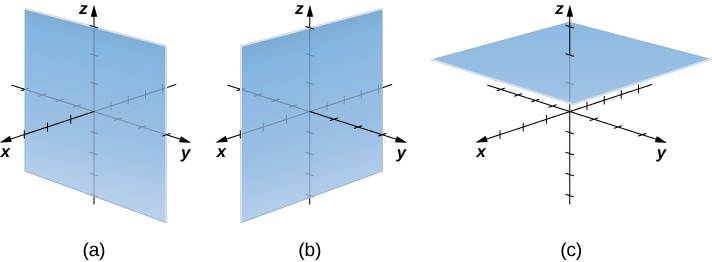
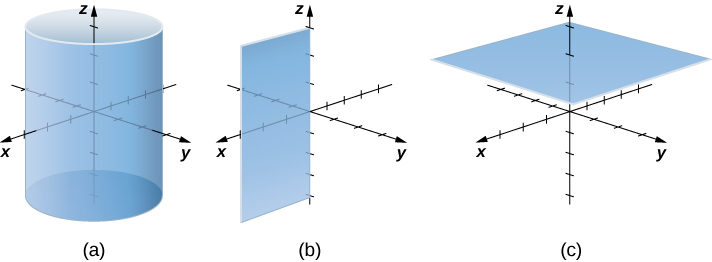
Let’s consider the differences between rectangular and cylindrical coordinates by looking at the surfaces generated when each of the coordinates is held constant. If \(c\) is a constant, then in rectangular coordinates, surfaces of the form \(x=c, y=c,\) or \(z=c\) are all planes. Planes of these forms are parallel to the \(yz\)-plane, the \(xz\)-plane, and the \(xy\)-plane, respectively. When we convert to cylindrical coordinates, the \(z\)-coordinate does not change. Therefore, in cylindrical coordinates, surfaces of the form \(z=c\) are planes parallel to the \(xy\)-plane. Now, let’s think about surfaces of the form \(r=c\). The points on these surfaces are at a fixed distance from the \(z\)-axis. In other words, these surfaces are vertical circular cylinders. Last, what about \(θ=c\)? The points on a surface of the form \(θ=c\) are at a fixed angle from the \(x\)-axis, which gives us a half-plane that starts at the \(z\)-axis (Figures \(\PageIndex{3}\) and \(\PageIndex{4}\)).
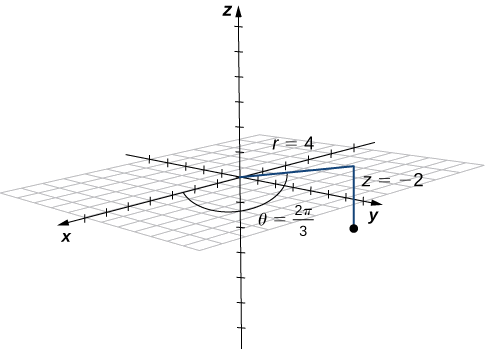
Plot the point with cylindrical coordinates \((4,\dfrac{2π}{3},−2)\) and express its location in rectangular coordinates.
Solution
Conversion from cylindrical to rectangular coordinates requires a simple application of the equations listed in Conversion between Cylindrical and Cartesian Coordinates:
\[\begin{align*} x &=r\cos θ=4\cos\dfrac{2π}{3}=−2 \\[4pt] y &=r\sin θ=4\sin \dfrac{2π}{3}=2\sqrt{3} \\[4pt] z &=−2 \end{align*}. \nonumber \]
The point with cylindrical coordinates \((4,\dfrac{2π}{3},−2)\) has rectangular coordinates \((−2,2\sqrt{3},−2)\) (Figure \(\PageIndex{5}\)).
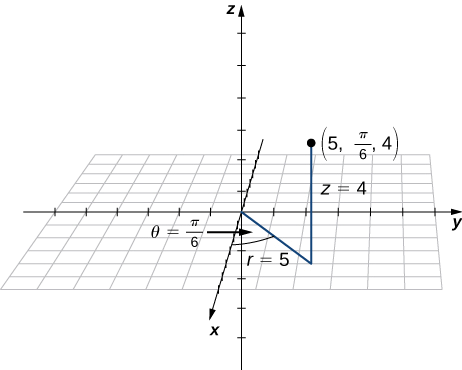
Point \(R\) has cylindrical coordinates \((5,\frac{π}{6},4)\). Plot \(R\) and describe its location in space using rectangular, or Cartesian, coordinates.
- Hint
-
The first two components match the polar coordinates of the point in the \(xy\)-plane.
- Answer
-
The rectangular coordinates of the point are \((\frac{5\sqrt{3}}{2},\frac{5}{2},4).\)
If this process seems familiar, it is with good reason. This is exactly the same process that we followed in Introduction to Parametric Equations and Polar Coordinates to convert from polar coordinates to two-dimensional rectangular coordinates.
Convert the rectangular coordinates \((1,−3,5)\) to cylindrical coordinates.
Solution
Use the second set of equations from Conversion between Cylindrical and Cartesian Coordinates to translate from rectangular to cylindrical coordinates:
\[\begin{align*} r^2 &= x^2+y^2 \\[4pt] r &=±\sqrt{1^2+(−3)^2} \\[4pt] &= ±\sqrt{10}. \end{align*}\]
We choose the positive square root, so \(r=\sqrt{10}\).Now, we apply the formula to find \(θ\). In this case, \(y\) is negative and \(x\) is positive, which means we must select the value of \(θ\) between \(\dfrac{3π}{2}\) and \(2π\):
\[\begin{align*} \tan θ &=\dfrac{y}{x} &=\dfrac{−3}{1} \\[4pt] θ &=\arctan(−3) &≈5.03\,\text{rad.} \end{align*}\]
In this case, the z-coordinates are the same in both rectangular and cylindrical coordinates:
\[ z=5. \nonumber \]
The point with rectangular coordinates \((1,−3,5)\) has cylindrical coordinates approximately equal to \((\sqrt{10},5.03,5).\)
Convert point \((−8,8,−7)\) from Cartesian coordinates to cylindrical coordinates.
- Hint
-
\(r^2=x^2+y^2\) and \(\tan θ=\frac{y}{x}\)
- Answer
-
\((8\sqrt{2},\frac{3π}{4},−7)\)
The use of cylindrical coordinates is common in fields such as physics. Physicists studying electrical charges and the capacitors used to store these charges have discovered that these systems sometimes have a cylindrical symmetry. These systems have complicated modeling equations in the Cartesian coordinate system, which make them difficult to describe and analyze. The equations can often be expressed in more simple terms using cylindrical coordinates. For example, the cylinder described by equation \(x^2+y^2=25\) in the Cartesian system can be represented by cylindrical equation \(r=5\).
Describe the surfaces with the given cylindrical equations.
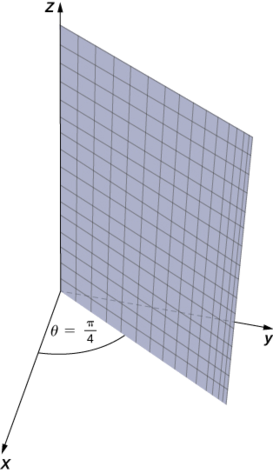
- \(θ=\dfrac{π}{4}\)
- \(r^2+z^2=9\)
- \(z=r\)
Solution
a. When the angle \(θ\) is held constant while \(r\) and \(z\) are allowed to vary, the result is a half-plane (Figure \(\PageIndex{6}\)).
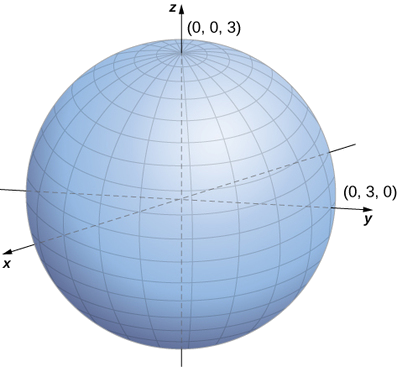
b. Substitute \(r^2=x^2+y^2\) into equation \(r^2+z^2=9\) to express the rectangular form of the equation: \(x^2+y^2+z^2=9\). This equation describes a sphere centered at the origin with radius \(3\) (Figure \(\PageIndex{7}\)).
c. To describe the surface defined by equation \(z=r\), is it useful to examine traces parallel to the \(xy\)-plane. For example, the trace in plane \(z=1\) is circle \(r=1\), the trace in plane \(z=3\) is circle \(r=3\), and so on. Each trace is a circle. As the value of \(z\) increases, the radius of the circle also increases. The resulting surface is a cone (Figure \(\PageIndex{8}\)).
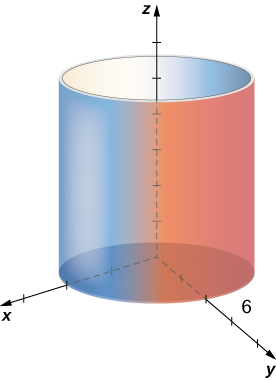
Describe the surface with cylindrical equation \(r=6\).
- Hint
-
The \(θ\) and \(z\) components of points on the surface can take any value.
- Answer
-
This surface is a cylinder with radius \(6\).
Spherical Coordinates
In the Cartesian coordinate system, the location of a point in space is described using an ordered triple in which each coordinate represents a distance. In the cylindrical coordinate system, the location of a point in space is described using two distances \((r\) and \(z)\) and an angle measure \((θ)\). In the spherical coordinate system, we again use an ordered triple to describe the location of a point in space. In this case, the triple describes one distance and two angles. Spherical coordinates make it simple to describe a sphere, just as cylindrical coordinates make it easy to describe a cylinder. Grid lines for spherical coordinates are based on angle measures, like those for polar coordinates.
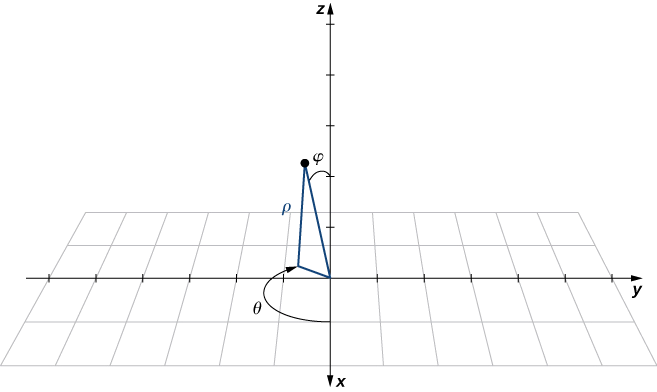
In the spherical coordinate system, a point \(P\) in space (Figure \(\PageIndex{9}\)) is represented by the ordered triple \((ρ,θ,φ)\) where
- \(ρ\) (the Greek letter rho) is the distance between \(P\) and the origin \((ρ≠0);\)
- \(θ\) is the same angle used to describe the location in cylindrical coordinates;
- \(φ\) (the Greek letter phi) is the angle formed by the positive \(z\)-axis and line segment \(\overline{OP}\), where \(O\) is the origin and \(0≤φ≤π.\)
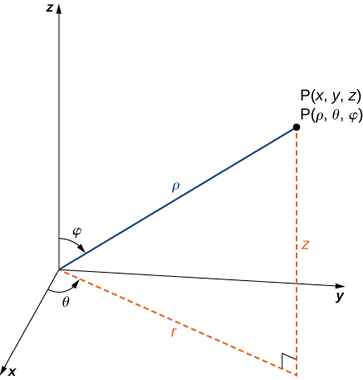
By convention, the origin is represented as \((0,0,0)\) in spherical coordinates.
Rectangular coordinates \((x,y,z)\), cylindrical coordinates \((r,θ,z),\) and spherical coordinates \((ρ,θ,φ)\) of a point are related as follows:
Convert from spherical coordinates to rectangular coordinates
These equations are used to convert from spherical coordinates to rectangular coordinates.
- \(x=ρ\sin φ\cos θ\)
- \(y=ρ\sin φ\sin θ\)
- \(z=ρ\cos φ\)
Convert from rectangular coordinates to spherical coordinates
These equations are used to convert from rectangular coordinates to spherical coordinates.
- \(ρ^2=x^2+y^2+z^2\)
- \(\tan θ=\dfrac{y}{x}\)
- \(φ=\arccos\left(\dfrac{z}{\sqrt{x^2+y^2+z^2}}\right).\)
Convert from spherical coordinates to cylindrical coordinates
These equations are used to convert from spherical coordinates to cylindrical coordinates.
- \(r=ρ\sin φ\)
- \(θ=θ\)
- \(z=ρ\cos φ\)
Convert from cylindrical coordinates to spherical coordinates
These equations are used to convert from cylindrical coordinates to spherical coordinates.
- \(ρ=\sqrt{r^2+z^2}\)
- \(θ=θ\)
- \(φ=\arccos\left(\dfrac{z}{\sqrt{r^2+z^2}}\right)\)
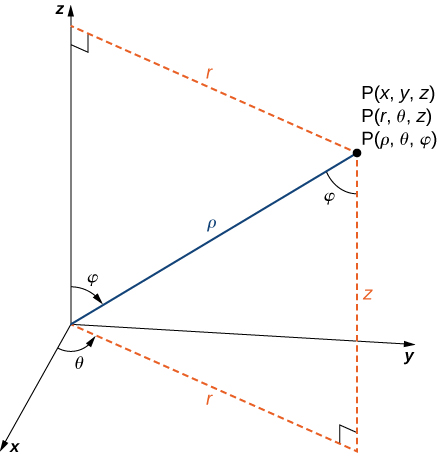
The formulas to convert from spherical coordinates to rectangular coordinates may seem complex, but they are straightforward applications of trigonometry. Looking at Figure \(\PageIndex{10}\), it is easy to see that \(r=ρ \sin φ\). Then, looking at the triangle in the \(xy\)-plane with r as its hypotenuse, we have \(x=r\cos θ=ρ\sin φ \cos θ\). The derivation of the formula for \(y\) is similar. Figure \(\PageIndex{10}\) also shows that \(ρ^2=r^2+z^2=x^2+y^2+z^2\) and \(z=ρ\cos φ\). Solving this last equation for \(φ\) and then substituting \(ρ=\sqrt{r^2+z^2}\) (from the first equation) yields \(φ=\arccos\left(\dfrac{z}{\sqrt{r^2+z^2}}\right)\). Also, note that, as before, we must be careful when using the formula \(\tan θ=\dfrac{y}{x}\) to choose the correct value of \(θ\).
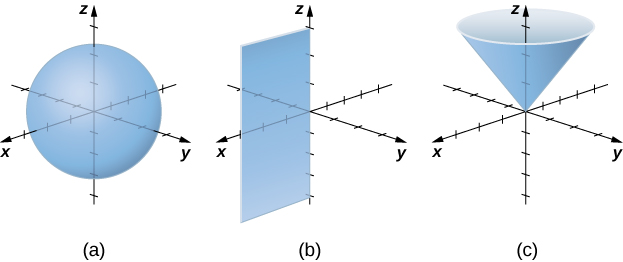
As we did with cylindrical coordinates, let’s consider the surfaces that are generated when each of the coordinates is held constant. Let \(c\) be a constant, and consider surfaces of the form \(ρ=c\). Points on these surfaces are at a fixed distance from the origin and form a sphere. The coordinate \(θ\) in the spherical coordinate system is the same as in the cylindrical coordinate system, so surfaces of the form \(θ=c\) are half-planes, as before. Last, consider surfaces of the form \(φ=c\). The points on these surfaces are at a fixed angle from the \(z\)-axis and form a half-cone (Figure \(\PageIndex{11}\)).
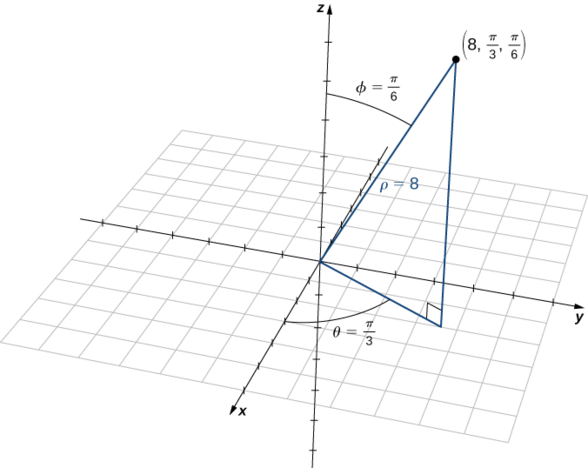
Plot the point with spherical coordinates \((8,\dfrac{π}{3},\dfrac{π}{6})\) and express its location in both rectangular and cylindrical coordinates.
Solution
Use the equations in Converting among Spherical, Cylindrical, and Rectangular Coordinates to translate between spherical and cylindrical coordinates (Figure \(\PageIndex{12}\)):
\[ \begin{align*} x &=ρ\sin φ\cos θ \\[4pt] &=8 \sin\left(\dfrac{π}{6}\right) \cos\left(\dfrac{π}{3}\right) \\[4pt] &= 8\left(\dfrac{1}{2}\right)\dfrac{1}{2} \\[4pt] &=2 \\[4pt] y &=ρ\sin φ\sin θ \\[4pt] &= 8\sin\left(\dfrac{π}{6}\right)\sin\left(\dfrac{π}{3}\right) \\[4pt] &= 8\left(\dfrac{1}{2}\right)\dfrac{\sqrt{3}}{2} \\[4pt] &= 2\sqrt{3} \\[4pt] z &=ρ\cos φ \\[4pt] &= 8\cos\left(\dfrac{π}{6}\right) \\[4pt] &= 8\left(\dfrac{\sqrt{3}}{2}\right) \\[4pt] &= 4\sqrt{3} \end{align*}\]
The point with spherical coordinates \((8,\dfrac{π}{3},\dfrac{π}{6})\) has rectangular coordinates \((2,2\sqrt{3},4\sqrt{3}).\)
Finding the values in cylindrical coordinates is equally straightforward:
\[ \begin{align*} r&=ρ \sin φ \\[4pt] &= 8\sin \dfrac{π}{6} \\[4pt] &=4 \\[4pt] θ&=θ \\[4pt] z&=ρ\cos φ\\[4pt] &= 8\cos\dfrac{π}{6} \\[4pt] &= 4\sqrt{3} .\end{align*}\]
Thus, cylindrical coordinates for the point are \((4,\dfrac{π}{3},4\sqrt{3})\).
Plot the point with spherical coordinates \((2,−\frac{5π}{6},\frac{π}{6})\) and describe its location in both rectangular and cylindrical coordinates.
- Hint
-
Converting the coordinates first may help to find the location of the point in space more easily.
- Answer
-
Cartesian: \((−\frac{\sqrt{3}}{2},−\frac{1}{2},\sqrt{3}),\) cylindrical: \((1,−\frac{5π}{6},\sqrt{3})\)
Convert the rectangular coordinates \((−1,1,\sqrt{6})\) to both spherical and cylindrical coordinates.
Solution
Start by converting from rectangular to spherical coordinates:
\[ \begin{align*} ρ^2 &=x^2+y^2+z^2=(−1)^2+1^2+(\sqrt{6})^2=8 \\[4pt] \tan θ &=\dfrac{1}{−1} \\[4pt] ρ&=2\sqrt{2} \text{ and }θ=\arctan(−1)=\dfrac{3π}{4}. \end{align*}\]
Because \((x,y)=(−1,1)\), then the correct choice for \(θ\) is \(\frac{3π}{4}\).
There are actually two ways to identify \(φ\). We can use the equation \(φ=\arccos\left(\dfrac{z}{\sqrt{x^2+y^2+z^2}}\right)\). A more simple approach, however, is to use equation \(z=ρ\cos φ.\) We know that \(z=\sqrt{6}\) and \(ρ=2\sqrt{2}\), so
\(\sqrt{6}=2\sqrt{2}\cos φ,\) so \(\cos φ=\dfrac{\sqrt{6}}{2\sqrt{2}}=\dfrac{\sqrt{3}}{2}\)
and therefore \(φ=\dfrac{π}{6}\). The spherical coordinates of the point are \((2\sqrt{2},\dfrac{3π}{4},\dfrac{π}{6}).\)
To find the cylindrical coordinates for the point, we need only find \(r\):
\(r=ρ\sin φ=2\sqrt{2}\sin(\dfrac{π}{6})=\sqrt{2}.\)
The cylindrical coordinates for the point are \((\sqrt{2},\dfrac{3π}{4},\sqrt{6})\).
Describe the surfaces with the given spherical equations.
- \(θ=\dfrac{π}{3}\)
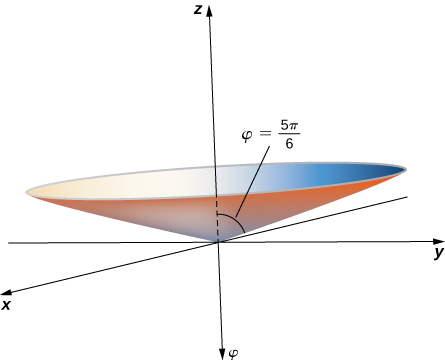
- \(φ=\dfrac{5π}{6}\)
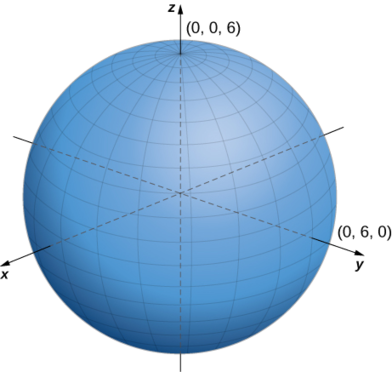
- \(ρ=6\)
- \(ρ=\sin θ \sinφ\)
Solution
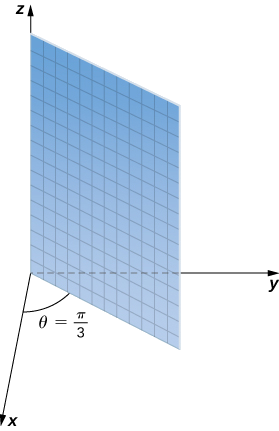
a. The variable \(θ\) represents the measure of the same angle in both the cylindrical and spherical coordinate systems. Points with coordinates \((ρ,\dfrac{π}{3},φ)\) lie on the plane that forms angle \(θ=\dfrac{π}{3}\) with the positive \(x\)-axis. Because \(ρ>0\), the surface described by equation \(θ=\dfrac{π}{3}\) is the half-plane shown in Figure \(\PageIndex{13}\).
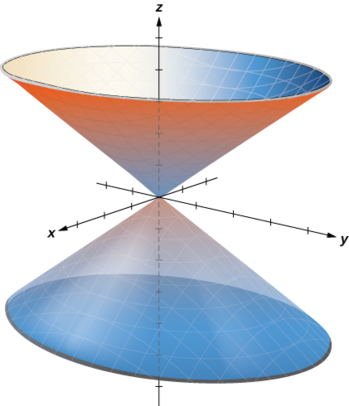
b. Equation \(φ=\dfrac{5π}{6}\) describes all points in the spherical coordinate system that lie on a line from the origin forming an angle measuring \(\dfrac{5π}{6}\) rad with the positive \(z\)-axis. These points form a half-cone (Figure \(\PageIndex{14}\)). Because there is only one value for \(φ\) that is measured from the positive \(z\)-axis, we do not get the full cone (with two pieces).
To find the equation in rectangular coordinates, use equation \(φ=\arccos\left(\dfrac{z}{\sqrt{x^2+y^2+z^2}}\right).\)
\[ \begin{align*} \dfrac{5π}{6} &=\arccos\left(\dfrac{z}{\sqrt{x^2+y^2+z^2}}\right) \\[4pt] \cos\dfrac{5π}{6}&=\dfrac{z}{\sqrt{x^2+y^2+z^2}} \\[4pt] −\dfrac{\sqrt{3}}{2}&=\dfrac{z}{\sqrt{x^2+y^2+z^2}} \\[4pt] \dfrac{3}{4} &=\dfrac{z^2}{x^2+y^2+z^2} \\[4pt] \dfrac{3x^2}{4}+\dfrac{3y^2}{4}+\dfrac{3z^2}{4} &=z^2 \\[4pt] \dfrac{3x^2}{4}+\dfrac{3y^2}{4}−\dfrac{z^2}{4} &=0. \end{align*}\]
This is the equation of a cone centered on the \(z\)-axis.
c. Equation \(ρ=6\) describes the set of all points \(6\) units away from the origin—a sphere with radius \(6\) (Figure \(\PageIndex{15}\)).
d. To identify this surface, convert the equation from spherical to rectangular coordinates, using equations \(y=ρ\sin φ\sin θ\) and \(ρ^2=x^2+y^2+z^2:\)
\(ρ=\sin θ \sin φ\)
\(ρ^2=ρ\sin θ\sin φ\) Multiply both sides of the equation by \(ρ\).
\(x^2+y^2+z^2=y\) Substitute rectangular variables using the equations above.
\(x^2+y^2−y+z^2=0\) Subtract \(y\) from both sides of the equation.
\(x^2+y^2−y+\dfrac{1}{4}+z^2=\dfrac{1}{4}\) Complete the square.
\(x^2+\left(y−\dfrac{1}{2}\right)^2+z^2=\dfrac{1}{4}\). Rewrite the middle terms as a perfect square.
The equation describes a sphere centered at point \((0,\dfrac{1}{2},0)\) with radius \(\dfrac{1}{2}\).
Describe the surfaces defined by the following equations.
- \(ρ=13\)
- \(θ=\dfrac{2π}{3}\)
- \(φ=\dfrac{π}{4}\)
- Hint
-
Think about what each component represents and what it means to hold that component constant.
- Answer a
-
This is the set of all points \(13\) units from the origin. This set forms a sphere with radius \(13\).
- Answer b
-
This set of points forms a half plane. The angle between the half plane and the positive \(x\)-axis is \(θ=\dfrac{2π}{3}.\)
- Answer c
-
Let \(P\) be a point on this surface. The position vector of this point forms an angle of \(φ=\dfrac{π}{4}\) with the positive \(z\)-axis, which means that points closer to the origin are closer to the axis. These points form a half-cone.
Spherical coordinates are useful in analyzing systems that have some degree of symmetry about a point, such as the volume of the space inside a domed stadium or wind speeds in a planet’s atmosphere. A sphere that has Cartesian equation \(x^2+y^2+z^2=c^2\) has the simple equation \(ρ=c\) in spherical coordinates.
In geography, latitude and longitude are used to describe locations on Earth’s surface, as shown in Figure \(\PageIndex{16}\). Although the shape of Earth is not a perfect sphere, we use spherical coordinates to communicate the locations of points on Earth. Let’s assume Earth has the shape of a sphere with radius \(4000\) mi. We express angle measures in degrees rather than radians because latitude and longitude are measured in degrees.

Let the center of Earth be the center of the sphere, with the ray from the center through the North Pole representing the positive \(z\)-axis. The prime meridian represents the trace of the surface as it intersects the \(xz\)-plane. The equator is the trace of the sphere intersecting the \(xy\)-plane.
The latitude of Columbus, Ohio, is \(40°\) N and the longitude is \(83°\) W, which means that Columbus is \(40°\) north of the equator. Imagine a ray from the center of Earth through Columbus and a ray from the center of Earth through the equator directly south of Columbus. The measure of the angle formed by the rays is \(40°\). In the same way, measuring from the prime meridian, Columbus lies \(83°\) to the west. Express the location of Columbus in spherical coordinates.
Solution
The radius of Earth is \(4000\)mi, so \(ρ=4000\). The intersection of the prime meridian and the equator lies on the positive \(x\)-axis. Movement to the west is then described with negative angle measures, which shows that \(θ=−83°\), Because Columbus lies \(40°\) north of the equator, it lies \(50°\) south of the North Pole, so \(φ=50°\). In spherical coordinates, Columbus lies at point \((4000,−83°,50°).\)
Sydney, Australia is at \(34°S\) and \(151°E.\) Express Sydney’s location in spherical coordinates.
- Hint
-
Because Sydney lies south of the equator, we need to add \(90°\) to find the angle measured from the positive \(z\)-axis.
- Answer
-
\((4000,151°,124°)\)
Cylindrical and spherical coordinates give us the flexibility to select a coordinate system appropriate to the problem at hand. A thoughtful choice of coordinate system can make a problem much easier to solve, whereas a poor choice can lead to unnecessarily complex calculations. In the following example, we examine several different problems and discuss how to select the best coordinate system for each one.
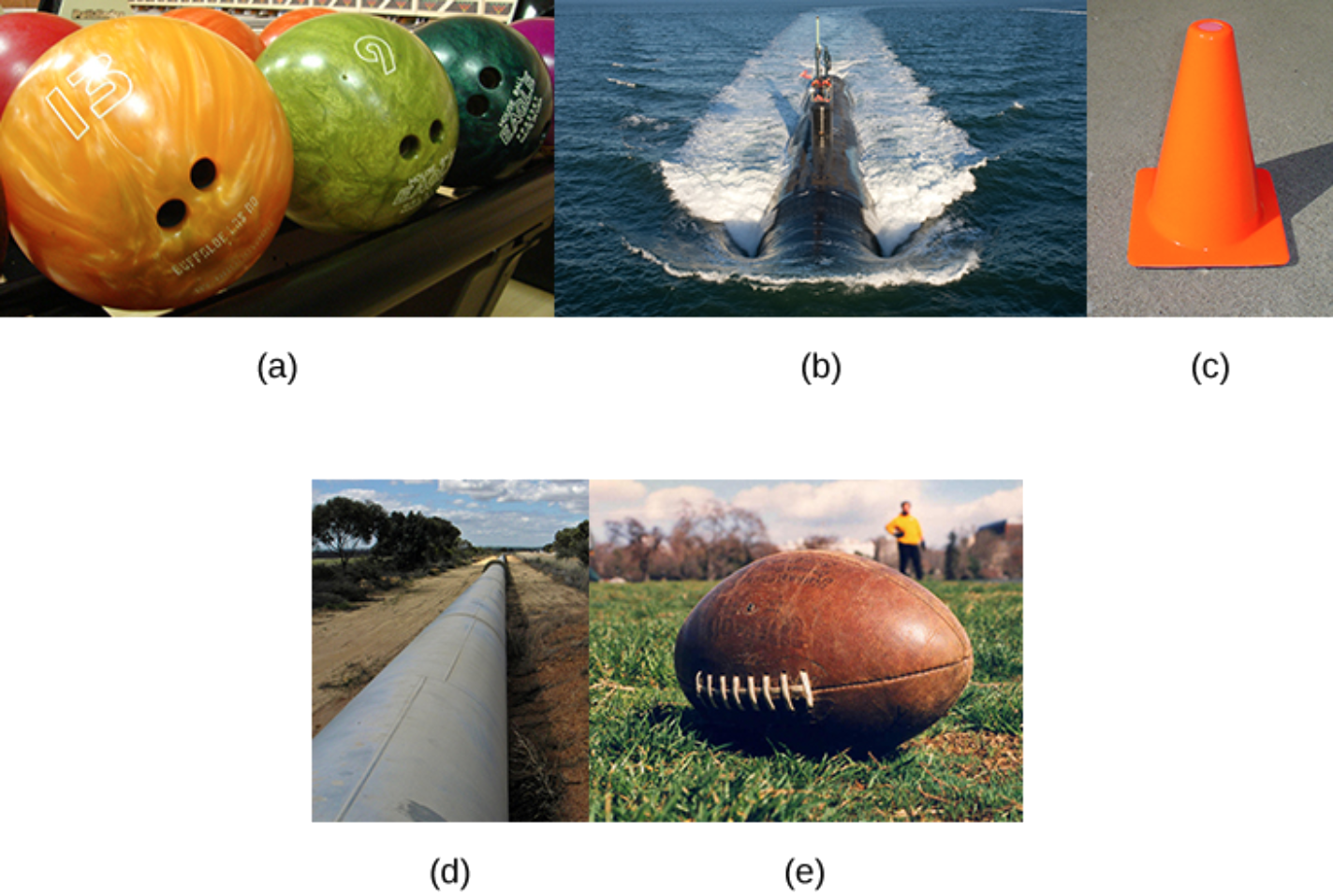
In each of the following situations, we determine which coordinate system is most appropriate and describe how we would orient the coordinate axes. There could be more than one right answer for how the axes should be oriented, but we select an orientation that makes sense in the context of the problem. Note: There is not enough information to set up or solve these problems; we simply select the coordinate system (Figure \(\PageIndex{17}\)).
- Find the center of gravity of a bowling ball.
- Determine the velocity of a submarine subjected to an ocean current.
- Calculate the pressure in a conical water tank.
- Find the volume of oil flowing through a pipeline.
- Determine the amount of leather required to make a football.
Solution
- Clearly, a bowling ball is a sphere, so spherical coordinates would probably work best here. The origin should be located at the physical center of the ball. There is no obvious choice for how the \(x\)-, \(y\)- and \(z\)-axes should be oriented. Bowling balls normally have a weight block in the center. One possible choice is to align the \(z\)-axis with the axis of symmetry of the weight block.
- A submarine generally moves in a straight line. There is no rotational or spherical symmetry that applies in this situation, so rectangular coordinates are a good choice. The \(z\)-axis should probably point upward. The \(x\)- and \(y\)-axes could be aligned to point east and north, respectively. The origin should be some convenient physical location, such as the starting position of the submarine or the location of a particular port.
- A cone has several kinds of symmetry. In cylindrical coordinates, a cone can be represented by equation \(z=kr,\) where \(k\) is a constant. In spherical coordinates, we have seen that surfaces of the form \(φ=c\) are half-cones. Last, in rectangular coordinates, elliptic cones are quadric surfaces and can be represented by equations of the form \(z^2=\dfrac{x^2}{a^2}+\dfrac{y^2}{b^2}.\) In this case, we could choose any of the three. However, the equation for the surface is more complicated in rectangular coordinates than in the other two systems, so we might want to avoid that choice. In addition, we are talking about a water tank, and the depth of the water might come into play at some point in our calculations, so it might be nice to have a component that represents height and depth directly. Based on this reasoning, cylindrical coordinates might be the best choice. Choose the \(z\)-axis to align with the axis of the cone. The orientation of the other two axes is arbitrary. The origin should be the bottom point of the cone.
- A pipeline is a cylinder, so cylindrical coordinates would be best the best choice. In this case, however, we would likely choose to orient our \(z\)-axis with the center axis of the pipeline. The \(x\)-axis could be chosen to point straight downward or to some other logical direction. The origin should be chosen based on the problem statement. Note that this puts the \(z\)-axis in a horizontal orientation, which is a little different from what we usually do. It may make sense to choose an unusual orientation for the axes if it makes sense for the problem.
- A football has rotational symmetry about a central axis, so cylindrical coordinates would work best. The \(z\)-axis should align with the axis of the ball. The origin could be the center of the ball or perhaps one of the ends. The position of the \(x\)-axis is arbitrary.
Which coordinate system is most appropriate for creating a star map, as viewed from Earth (see the following figure)?
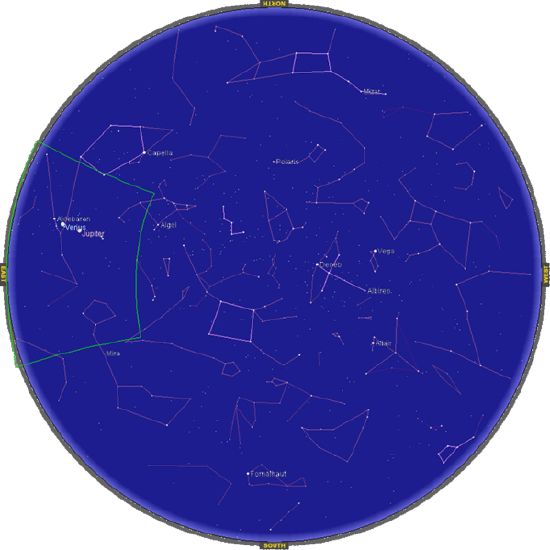
How should we orient the coordinate axes?
- Hint
-
What kinds of symmetry are present in this situation?
- Answer
-
Spherical coordinates with the origin located at the center of the earth, the \(z\)-axis aligned with the North Pole, and the \(x\)-axis aligned with the prime meridian
Key Concepts
- In the cylindrical coordinate system, a point in space is represented by the ordered triple \((r,θ,z),\) where \((r,θ)\) represents the polar coordinates of the point’s projection in the \(xy\)-plane and z represents the point’s projection onto the \(z\)-axis.
- To convert a point from cylindrical coordinates to Cartesian coordinates, use equations \(x=r\cos θ, y=r\sin θ,\) and \(z=z.\)
- To convert a point from Cartesian coordinates to cylindrical coordinates, use equations \(r^2=x^2+y^2, \tan θ=\dfrac{y}{x},\) and \(z=z.\)
- In the spherical coordinate system, a point \(P\) in space is represented by the ordered triple \((ρ,θ,φ)\), where \(ρ\) is the distance between \(P\) and the origin \((ρ≠0), θ\) is the same angle used to describe the location in cylindrical coordinates, and \(φ\) is the angle formed by the positive \(z\)-axis and line segment \(\overline{OP}\), where \(O\) is the origin and \(0≤φ≤π.\)
- To convert a point from spherical coordinates to Cartesian coordinates, use equations \(x=ρ\sin φ\cos θ, y=ρ\sin φ\sin θ,\) and \(z=ρ\cos φ.\)
- To convert a point from Cartesian coordinates to spherical coordinates, use equations \(ρ^2=x^2+y^2+z^2, \tan θ=\dfrac{y}{x},\) and \(φ=\arccos\left(\dfrac{z}{\sqrt{x^2+y^2+z^2}}\right)\).
- To convert a point from spherical coordinates to cylindrical coordinates, use equations \(r=ρ\sin φ, θ=θ,\) and \(z=ρ\cos φ.\)
- To convert a point from cylindrical coordinates to spherical coordinates, use equations \(ρ=\sqrt{r^2+z^2}, θ=θ,\) and \(φ=\arccos\left(\dfrac{z}{\sqrt{r^2+z^2}}\right).\)
Glossary
- cylindrical coordinate system
- a way to describe a location in space with an ordered triple \((r,θ,z),\) where \((r,θ)\) represents the polar coordinates of the point’s projection in the \(xy\)-plane, and z represents the point’s projection onto the \(z\)-axis
- spherical coordinate system
- a way to describe a location in space with an ordered triple \((ρ,θ,φ),\) where \(ρ\) is the distance between \(P\) and the origin \((ρ≠0), θ\) is the same angle used to describe the location in cylindrical coordinates, and \(φ\) is the angle formed by the positive \(z\)-axis and line segment \(\bar{OP}\), where \(O\) is the origin and \(0≤φ≤π\)
Gilbert Strang (MIT) and Edwin “Jed” Herman (Harvey Mudd) with many contributing authors. This content by OpenStax is licensed with a CC-BY-SA-NC 4.0 license. Download for free at http://cnx.org.
- Paul Seeburger edited the LaTeX on the page