
3.3: Dihedral Groups (Group of Symmetries)
- Page ID
- 132269

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Dihedral groups are an important class of abstract algebra groups that arise naturally in geometry and other areas of mathematics.
A dihedral group is a group of symmetries of a regular polygon with n sides, where n is a positive integer. The dihedral group of order 2n, denoted by D_n, is the group of all possible rotations and reflections of the regular polygon.The group \(D_n \) consists of \(2n\) elements, which can be depicted as follows:
- \(n \) rotations, denoted by \(R_0, R_{360/n}, R_{(360)(2)/n} ..., R_{(n-1)360/n}, \) where \(R_{i (360)/n}\) represents a rotation of \((360i/n) \) degrees clockwise about the center of the polygon.
- \(n \) reflections, denoted by \(F_0, F_1, F_2, ..., F_{(n-1)},\) where \(F_i\) represents a reflection across a line passing through the center of the polygon and one of its vertices.
The group operation in \(D_n,\) is the composition of symmetries.
Alternatively, the Dihedral group \(D_n\) is defined by \( D_n=<r,s | s^2 =e, r^n=e, srs=r^{-1}>\) and, \( |D_n|= 2n.\)
All rigid motions on n-gon:
a. To replace first vertex we have n choices.
b. the second vertex can be replaced by kth vertex by k+1 or k-1.
 Dihedral groups \(D_n\) are non-abelian, for integers \( n ≥ 3.\)
Dihedral groups \(D_n\) are non-abelian, for integers \( n ≥ 3.\)
- Proof
-
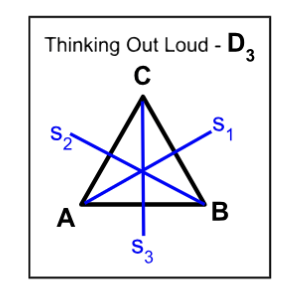
Let \(a,b \in D_3.\)
We will show that \(ab \ne ba, \; \forall a,b \in D_n, n \ge 3.\)
\(D_3=\{e,(AB),(AC),(BC),(ABC),(ACB)\}. \)
Since \(D_3\) is isomorphic to \(S_3, D_3\)is non-abelian.
Since \(D_3 \le D_n, \forall \; n\ge 3, D_n\) is non-abelian for \(n \ge 3.\)
The Dihedral group \(D_3\) is isomorphic to \(S_3.\)
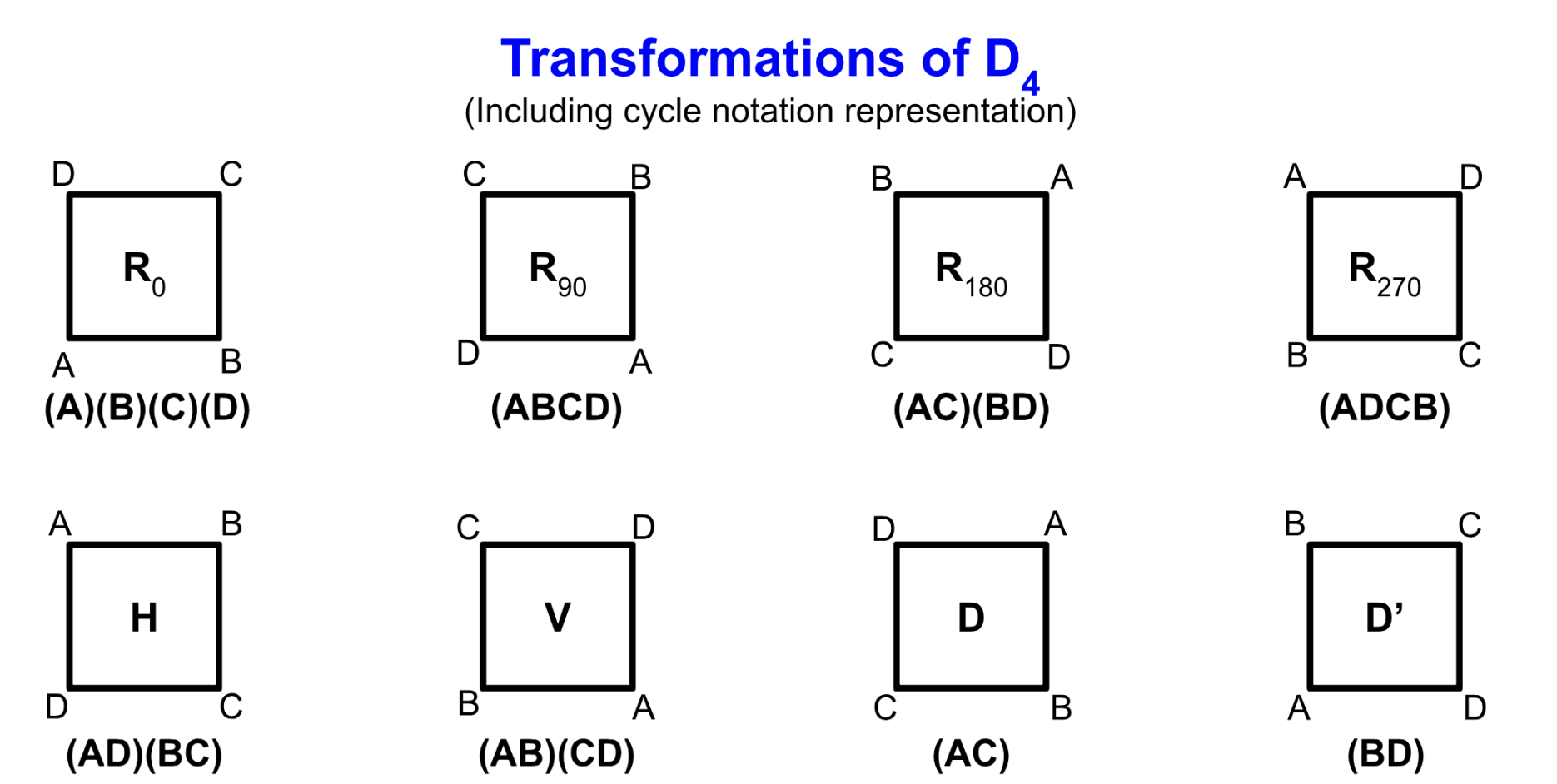
Consider the possible rotations and reflections of a 4-sided regular polygon -Square, \(D_4\).
|
Cayley Table for \(D_4\) |
||||||||
|
R0 |
R90 |
R180 |
R270 |
H |
V |
D |
D’ |
|
|
R0 |
R0 |
R90 |
R180 |
R270 |
H |
V |
D |
D’ |
|
R90 |
R90 |
R180 |
R270 |
R0 |
D’ |
D |
H |
V |
|
R180 |
R180 |
R270 |
R0 |
R90 |
V |
H |
D’ |
D |
|
R270 |
R270 |
R0 |
R90 |
R180 |
D |
D’ |
V |
H |
|
H |
H |
D |
V |
D’ |
R0 |
R180 |
R90 |
R270 |
|
V |
V |
D’ |
H |
D |
R180 |
R0 |
R270 |
R90 |
|
D |
D |
V |
D’ |
H |
R270 |
R90 |
R0 |
R180 |
|
D’ |
D’ |
H |
D |
V |
R90 |
R270 |
R180 |
R0 |
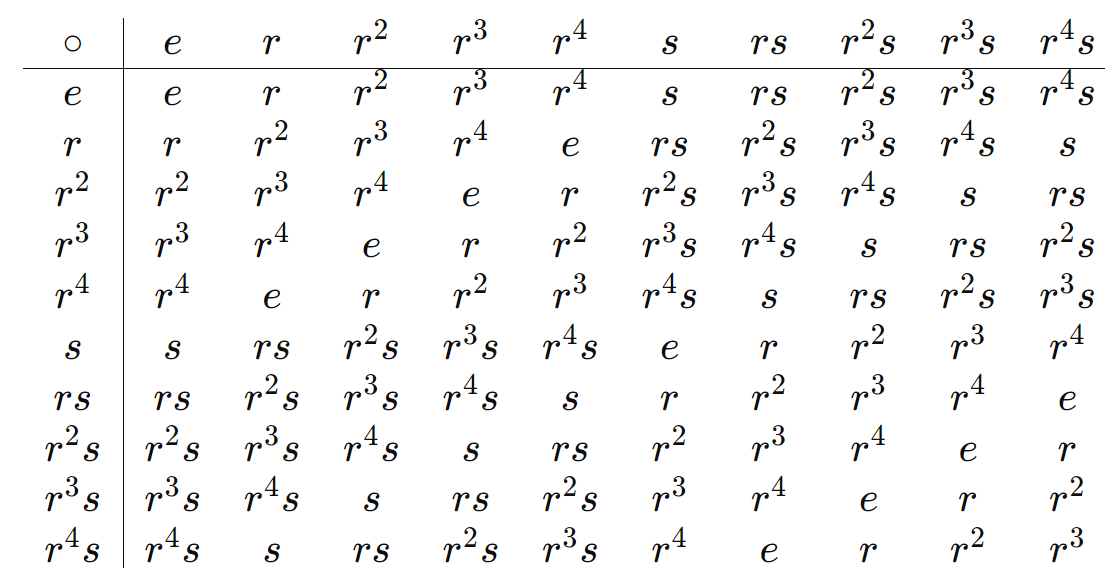
\(D_5\) dihedral group of order \(10\), is the group of symmetries of a regular pentagon. It is composed of 10 elements, which can be represented as rotations and reflections of the pentagon.
The Cayley table for \(D_5\):
Examples abound of corporations using Dihedral groups, \(D_n,\) as their logos. Below are examples of \(D_1, D_3, \) and \(D_5.\)

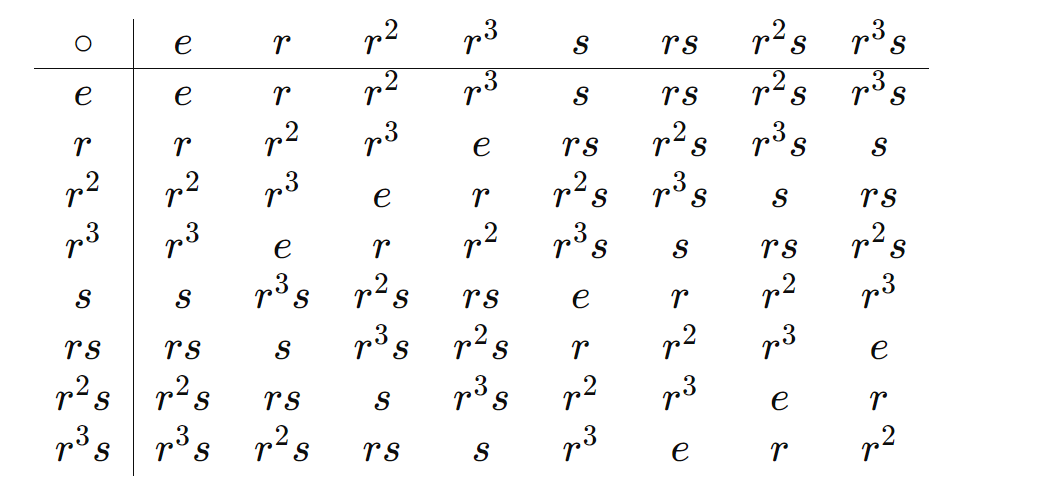
Consider the Dihedral group \(D_4\). \(D_4=<r,s|r^4=1, s^2=1, srs=r^{-1}>\).
-
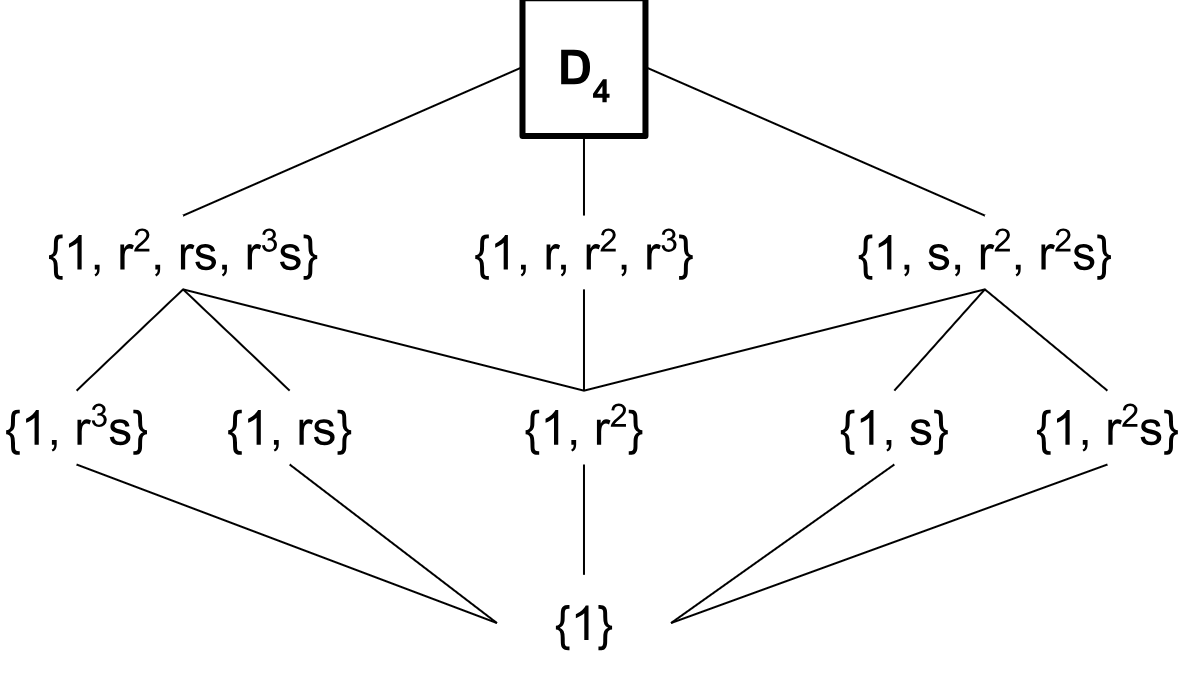
Find all the subgroups lattice of \(D_4\), the Dihedral group of order 8.
\(D_4=\{1,r,r^2,r^3,s,rs,r^2s,r^3s\}\). Thus the subgroup lattice would look like:
Proof:
We shall proceed by showing that all odd subgroups of \(D_4\) are cyclic.
The only possible odd subgroup is \(\{e\}\), which is cyclic.
Thus every subgroup of \(D_4\) of odd order is cyclic.◻
Let the group \(D_n=<r,s|r^n=1, s^2=1,srs=r^{-1}>\).
-
Then \(r^ks=sr^{-k}\).
- Proof
-
Consider \(r^ks=er^ks=s^2r^ks=ssr^ks=sr^{-k}.\)
-
The order of \(r^k\) is \(\frac{n}{\gcd(k,n)}\).
- Proof
-
We will first show that \(r^k\) is a generator of \(D_n\) if and only if \(n|k\).
Consider \(e=r^k\).
Then by the division algorithm, \(k=na+b\) where \(0 \le b < n\).
Thus \(e=r^k\)\)=r^{na+b}\)\)=r^{na}r^b\)\)=er^b\)\)=r^b\).
Since the smallest possible integer, \(m\), such that \(r^m=e\) is \(n\), \(b=0\).
Conversely, if \(n|k\), then \(k=ns, s \in \mathbb{Z}\).
Thus \(r^k=r^{ns}=(r^n)^s=e^s=e\).
Thus \(r^k=e\) iff \(n|k\).
Let \(b=r^k, \in D_4\) since \(r\) is a generator of \(D_n\).
We shall show that the smallest integer, \(m\) s.t. \(r^k=e\) is \(\frac{n}{k}\).
Let \(d=\gcd(n,k)\).
Consider \(e=b^m=r^{km}\).
Since this is the smallest integer \(m\) such that \(n|km\). Thus \(\frac{n}{d}|m(\frac{k}{d})\).
Since \(d\) is the greatest common divisor of \(n\) and \(k\), \(\frac{n}{d}\) and \(\frac{k}{d}\) are relatively prime.
Hence \(\frac{n}{d}|m(\frac{k}{d})\) means that \(\frac{n}{d}|m\). The smallest such \(m\) is \(\frac{n}{d}\).
Thus \(|r^k|= \frac{n}{\gcd(n,k)}\).◻
Find the centre of \(D_n\).
Solution:
Let \(D_n=<r,s|r^n=1, s^2=1,srs=r^{-1}>\)
We shall show that,
\(Z(D_n) = \{x \in D_n \mid dx = xd, \forall d \in D_n\} = \begin{cases}
\{1\}, & \text{if } n \text{ is not divisible by } 4 \\
\{1, r^2\}, & \text{if } n \text{ is divisible by } 4
\end{cases}\)
Let's consider an element \(x\) in \(D_n \) that commutes with every other element in the group. Therefore, any element in \(D_n \) that commutes with every other element is either the identity element e or a rotation \(r^k \) where \(k\) is a multiple of \(n/2 \) (for even \(n\)).
- If \(x\) is the identity element \(1\), then it commutes with every element, and it is in the center.
- If \(x \) is a rotation \(r^k,\) where \(k\) is a multiple of \(n/2\)) (for even \(n\)), or \(x\) is the identity element e (for odd \(n\)), then it commutes with every element, and it is in the center.
- If \(x\) is a rotation \(r^k,\) where \(k\) is not a multiple of \(n/2\)(for even \(n\)), then it commutes with all rotations, but not with reflections. Therefore, it cannot commute with every element, and it is not in the center.
By combining these two statements, we can conclude that the center of \(D_n\) consists of the identity element e and the rotation \(r^{n/2}\) (if \(n\) is divisible by \(4\)), or just the identity element \(1\) (if \(n\) is not divisible by \(4\)) for even \(n\). For odd \(n\), the center consists only of the identity element \(1.\)