
1.3: Stereographic Projection
- Page ID
- 85706

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
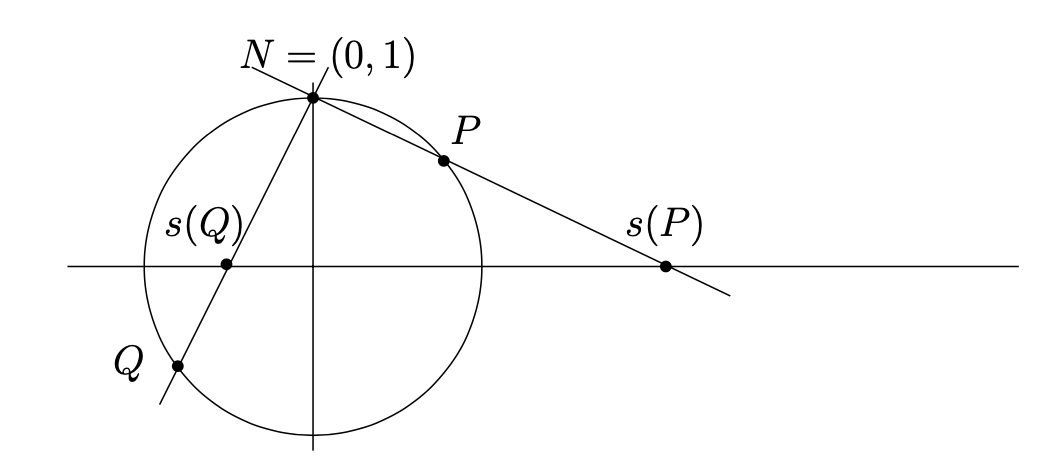
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Stereographic projection \(S^1\to \hat{\mathbb{R}}\)
Let \(S^1\) denote the unit circle in the \(x,y\)-plane.
\[
S^1 = \{(x,y)\in \mathbb{R}^2 \colon x^2+y^2=1\}\label{s1defn}\tag{1.3.1}
\]
Let \(N=(0,1)\) denote the "north pole" (that is, the point at the "top" of the unit circle). Given a point \(P=(x,y)\neq N\) on the unit circle, let \(s(P)\) denote the intersection of the line \(\overline{NP}\) with the \(x\)-axis. See Figure 1.3.1. The map \(s\colon S^1\setminus \{N\}\to \mathbb{R}\) given by this rule is called stereographic projection. Using similar triangles, it is easy to see that \(s(x,y)=\frac{x}{1-y}\text{.}\)
- Checkpoint 1.3.2.
-
Draw the relevant similar triangles and verify the formula \(s(x,y) = \frac{x}{1-y}\text{.}\)
We extend stereographic projection to the entire unit circle as follows. We call the set
\[\hat{\mathbb{R}}=\mathbb{R}\cup \{\infty\}\label{extendedrealsdefn}\tag{1.3.2}\]
the extended real numbers, where "\(∞\)" is an element that is not a real number. Now we define stereographic projection \(s\colon S^1 \to \hat{\mathbb{R}}\) by\[s(x,y) = \left\{
\begin{array}{cc}
\frac{x}{1-y} & y\neq 1\\
\infty & y=1
\end{array}
\right..\label{stereoproj1defn}\tag{1.3.3}\]
Stereographic projection \(S^2\to \hat{\mathbb{C}}\)
The definitions in the previous subsection extend naturally to higher dimensions. Here are the details for the main case of interest.
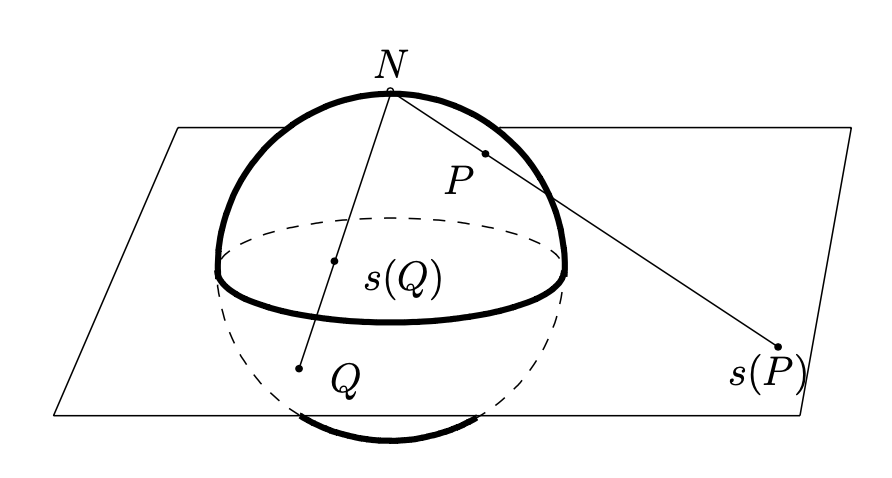
Let \(S^2\) denote the unit sphere in \(\mathbb{R}^3\text{.}\)
\[
S^2 = \{(a,b,c)\in \mathbb{R}^3\colon a^2+b^2+c^2=1\}\label{s2defn}\tag{1.3.4}
\]
Let \(N=(0,0,1)\) denote the "north pole" (that is, the point at the "top" of the sphere, where the positive \(z\)-axis is "up"). Given a point \(P=(a,b,c)\neq N\) on the unit sphere, let \(s(P)\) denote the intersection of the line \(\overline{NP}\) with the \(x,y\)-plane, which we identify with the complex plane \(\mathbb{C}\). See See Figure 1.3.3. The map \(s\colon S^2\setminus \{N\}\to \mathbb{C}\) given by this rule is called stereographic projection. Using similar triangles, it is easy to see that \(s(a,b,c)=\frac{a+ib}{1-c}\text{.}\)
We extend stereographic projection to the entire unit sphere as follows. We call the set
\[\hat{\mathbb{C}}=\mathbb{C}\cup \{\infty\}\label{extendedcomplexsdefn}\tag{1.3.5}\]
the extended complex numbers, where "\(∞\)" is an element that is not a complex number. Now we define stereographic projection \(s\colon S^2 \to \hat{\mathbb{C}}\) by
\[s(a,b,c) = \left\{
\begin{array}{cc}
\frac{a+ib}{1-c} & c\neq 1\\
\infty & c=1
\end{array}
\right..\label{stereoprojdefn}\tag{1.3.6}
\]
Exercises
Formulas for inverse stereographic projection.
It is intuitively clear that stereographic projection is a bijection. Make this rigorous by finding a formula for the inverse.
For \(s\colon S^1\to \hat{\mathbb{R}}\text{,}\) find a formula for \(s^{-1}\colon \hat{\mathbb{R}}\to S^1\text{.}\) Find \(s^{-1}(3)\text{.}\)
- Answer
-
\[
s^{-1}(r) = \begin{cases}
\left(\frac{2r}{r^2+1},\frac{r^2-1}{r^2+1}\right) &
\text{ if } r\neq \infty\\ (0,1)& \text{ if } r=\infty
\end{cases}
\nonumber \]\(s^{-1}(3) = (3/5,4/5)\)
For \(s\colon S^2\to \hat{\mathbb{C}}\text{,}\) find a formula for \(s^{-1}\colon \hat{\mathbb{C}}\to S^2\text{.}\) Find \(s^{-1}(3+i)\text{.}\)
- Answer
-
\[
s^{-1}(z) = \begin{cases}
\left(\frac{2Re(z)}{|z|^2+1},\frac{2Im(z)}{|z|^2+1},
\frac{|z|^2-1}{|z|^2+1}\right)& \text{ if } z\neq
\infty\\ (0,0,1) & \text{ if } z=\infty \end{cases}
\nonumber \]\(s^{-1}(3+i) = (6/11,2/11,9/11)\)
Conjugate transformations.
Let \(\mu \colon X\to Y\) be a bijective map. We say that maps and \(f\colon X\to X\) and \(g\colon Y\to Y\) are conjugate transformations (with respect to the bijection \(\mu\)) if \(f = \mu^{-1}\circ g\circ \mu\text{.}\)
Show that the maps \(S^1\to S^1\) given by \((x,y)\to (x,-y)\) and \(\hat{\mathbb{R}}\to \hat{\mathbb{R}}\) given by \(x\to 1/x\) are conjugate transformations with respect to stereographic projection
Show that the map \(R_{Z,\theta}\colon S^2\to S^2\) given by \((a,b,c)\to
(a\cos\theta-b\sin\theta,a\sin\theta+b\cos\theta,c)\) (a rotation about the \(z\)-axis by angle \(θ\)) and the map \(T_{Z,\theta}\colon \hat{\mathbb{C}}\to \hat{\mathbb{C}}\) given by \(z\to e^{i\theta}z\) are conjugate transformations with respect to stereographic projection.
Show that the map \(R_{X,\pi}\colon S^2\to S^2\) given by \((a,b,c)\to (a,-b,-c)\) (rotation about the \(x\)-axis by \(\pi\) radians) and the map \(T_{X,\pi}\colon \hat{\mathbb{C}}\to \hat{\mathbb{C}}\) given by \(z\to 1/z\) are conjugate transformations with respect to stereographic projection.
Show that the map \(R_{X,\pi/2}\colon S^2\to S^2\) given by \((a,b,c)\to (a,-c,b)\) (rotation about the \(x\)-axis by \(\pi/2\) radians) and the map \(T_{X,\pi/2}\colon \hat{\mathbb{C}}\to \hat{\mathbb{C}}\) given by \(z\to \frac{z+i}{iz+1}\) are conjugate transformations with respect to stereographic projection.
7. Projections of endpoints of diameters.
Show that \(s(a,b,c)(s(-a,-b,-c))^\ast=-1\) for any point \((a,b,c)\) in \(S^2\) with \(|c|\neq 1\text{.}\) Conversely, suppose that \(zw^\ast=-1\) for some \(z,w\in \mathbb{C}\text{.}\) Show that .