
4.8: Inverse Functions
- Page ID
- 40921
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)An inverse function undoes the action of the original function. So the inverse of a function that squared a number would be a function that square rooted a number. In general, an inverse function will take a \(y\) value from the original function and return the \(x\) value that produced it.
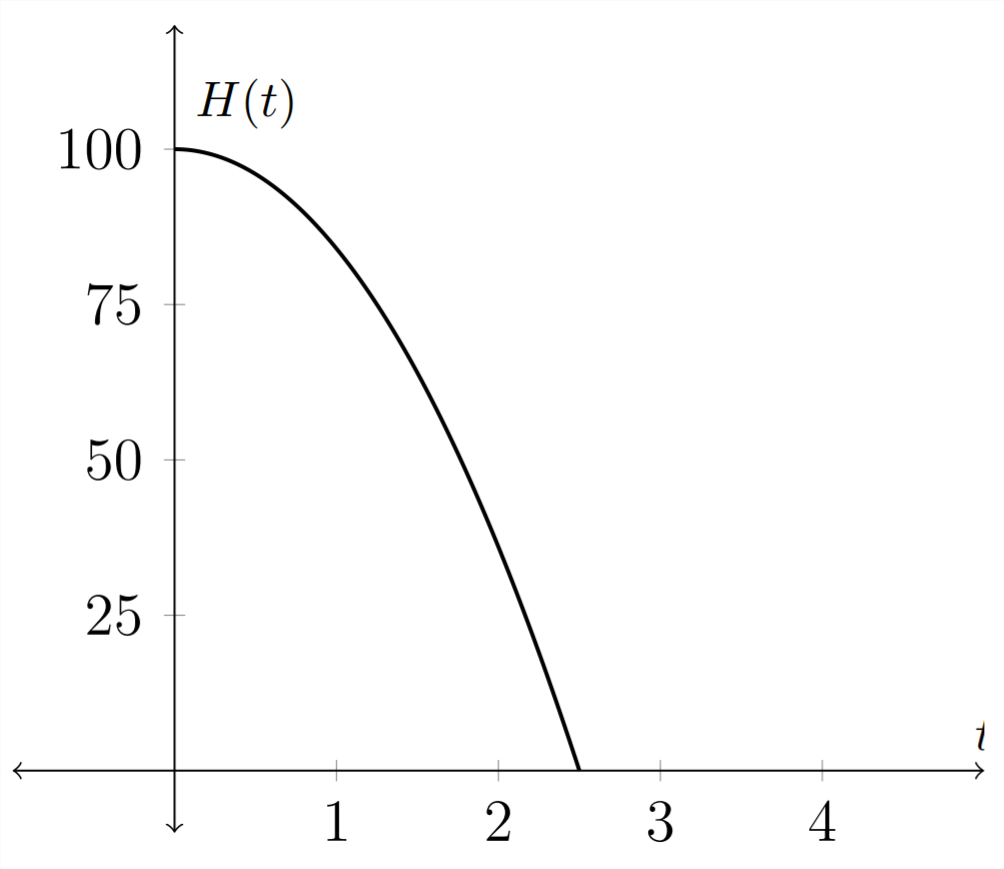
We can see this in an application. Given an object with little or no air resistance that is dropped from \(100 \mathrm{ft}\), the function that describes its height as a function of time would be:
\[
H(t)=100-16 t^{2}
\]
In this function, \(H(t)\) is the height of the object at time \(t .\) If we wanted to turn this around so that it described the time for a given height, then we would want to isolate the \(t\) variable. In this example, the graph of the function would change in that the original independent variable - \(t,\) becomes the dependent variable in the inverse function.
\[
\begin{aligned}
h &=100-16 t^{2} \\
16 t^{2} &=100-h \\
t^{2} &=\frac{100-h}{16} \\
t &=\sqrt{\frac{100-h}{16}} \\
T(h) &=\frac{\sqrt{100-h}}{4}
\end{aligned}
\]
Original function: \(H(t)=100-16 t^{2}\)
Inverse function: \(T(h)=\frac{\sqrt{100-h}}{4}\)
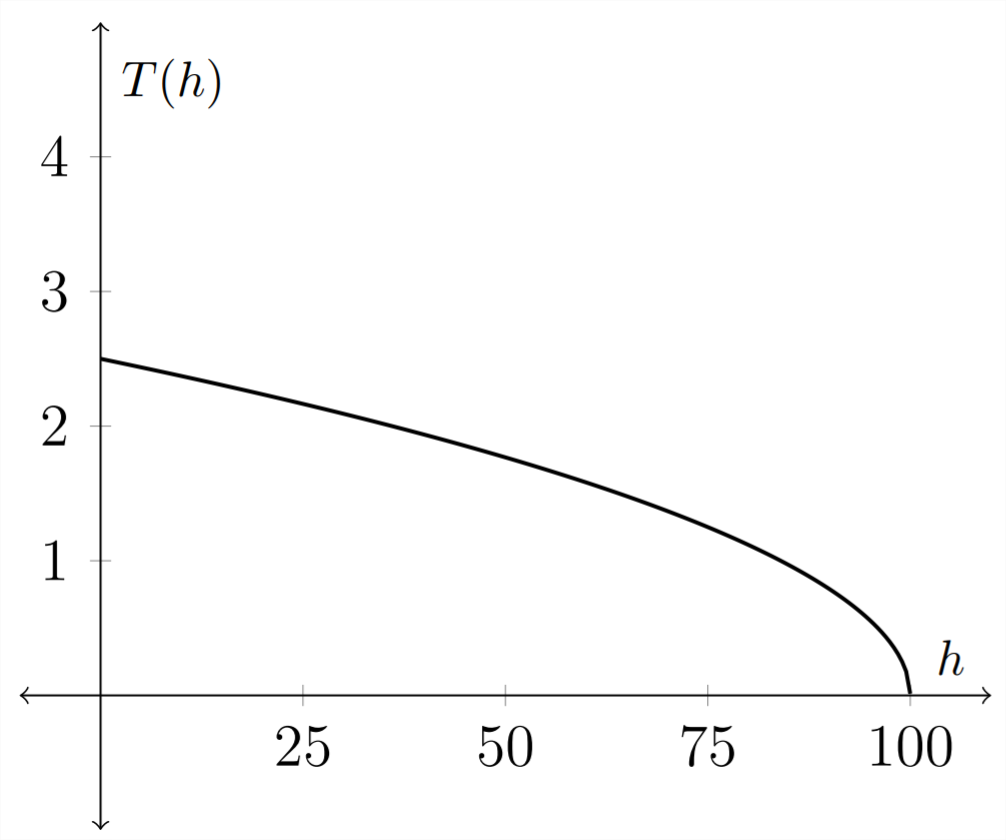
Notice that the graph of the function inverse is the original function reflected over the line \(y=x,\) because an inverse function interchanges the independent and dependent variables.
Finding a formula for an inverse function can be more confusing when we consider a standard function \(y=f(x) .\) In our standard notation, \(x\) is always considered to be the independent variable and \(y\) is always considered to be the dependent variable.
Notice in the example above that when we graphed the function and its inverse, the label on the \(x\) axis changed from \(t\) to \(h .\) In a standard function, the \(x\) axis will always be the \(x\) axis and the \(y\) axis will always be the \(y\) axis. To compensate for this, when we find a function inverse for a function stated in terms of \(x\) and \(y\) we generally interchange the \(x\) and \(y\) terms so that \(x\) remains the independent variable.
In our example, we had
\[
H(t)=100-16 t^{2}
\]
and found the inverse to be
\[
T(h)=\frac{\sqrt{100-h}}{4}
\]
If the original function had been stated in terms of \(x\) and \(y,\) then the process would have looked like this:
\begin{aligned}
f(x) &=100-16 x^{2} \\
y &=100-16 x^{2} \\
16 x^{2} &=100-y \\
x^{2} &=\frac{100-y}{16} \\
x &=\sqrt{\frac{100-y}{16}} \\
x &=\frac{\sqrt{100-y}}{4}
\end{aligned}
Then we switch the \(x\) and \(y\) variables to keep the \(x\) as the independent variable:
\[
y=f^{-1}(x)=\frac{\sqrt{100-x}}{4}
\]
\(\mathrm{So}\)
\[
f(x)=100-16 x^{2}
\]
and
\[
f^{-1}(x)=\frac{\sqrt{100-x}}{4}
\]
Exercises 4.8
Given the function \(f(x),\) find the inverse function \(f^{-1}(x)\)
1) \(\quad f(x)=3 x\)
2) \(\quad f(x)=-4 x\)
3) \(\quad f(x)=4 x+2\)
4) \(\quad f(x)=1-3 x\)
5) \(\quad f(x)=x^{3}-1\)
6) \(\quad f(x)=x^{3}+1\)
7) \(\quad f(x)=x^{2}+4 (x \geq 4)\)
8) \(\quad f(x)=x^{2}+9 (x \geq 9)\)
9) \(\quad f(x)=\frac{4}{x}\)
10) \(\quad f(x)=-\frac{3}{x}\)
11) \(\quad f(x)=\frac{1}{x-2}\)
12) \(\quad f(x)=\frac{4}{x+2}\)
13) \(\quad f(x)=\frac{2}{x+3}\)
14) \(\quad f(x)=\frac{4}{2-x}\)
15) \(\quad f(x)=\frac{3 x}{x+2}\)
16) \(\quad f(x)=-\frac{2 x}{x-1}\)
17) \(\quad f(x)=\frac{2 x}{3 x-1}\)
18) \(\quad f(x)=-\frac{3 x+1}{x}\)
19) \(\quad f(x)=\frac{3 x+4}{2 x-3}\)
20) \(\quad f(x)=\frac{2 x-3}{x+4}\)
21) \(\quad f(x)=\frac{2 x+3}{x+2}\)
22) \(\quad f(x)=-\frac{3 x+4}{x-2}\)
Find the inverse function for each of the following applications.
23) The volume of water left in a 1000 gallon tank that drains in 40 minutes is modeled by the equation:
\[
V(t)=1000\left(1-\frac{t}{40}\right)^{2}
\]
Find \(T(v)\) - the function that tells you how long the water has been draining given a particular volume left in the tank. Time is measured in minutes and the volume is measured in gallons.
24) The speed of a vehicle in miles per hour that leaves skid marks \(d\) feet long is modeled by the equation:
\[
R(d)=2 \sqrt{5 d}
\]
Find \(D(r)\) - the function that tells you the stopping distance for a vehicle traveling \(r\) miles per hour.
25) The period of a pendulum of length \(\ell\) can be expressed by the relationship:
\[
T(\ell)=2 \pi \sqrt{\frac{\ell}{980}}
\]
Find the function \(L(t)\) that determines the length of a pendulum given its period. Here the time is measured in seconds and the length is measured in centimeters.
26) The volume of a sphere of radius \(r\) is given by the formula:
\[
V(r)=\frac{4}{3} \pi r^{3}
\]
Find \(R(v)\) - the function that determines the radius of a sphere given its volume.