2.7: Derivatives of Inverse Functions
- Page ID
- 4636

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Recall that a function \(y=f(x)\) is said to be one to one if it passes the horizontal line test; that is, for two different \(x\) values \(x_1\) and \(x_2\), we do not have \(f(x_1)=f(x_2)\). In some cases the domain of \(f\) must be restricted so that it is one to one. For instance, consider \(f(x)=x^2\). Clearly, \(f(-1)= f(1)\), so \(f\) is not one to one on its regular domain, but by restricting \(f\) to \((0,\infty)\), \(f\) is one to one.
Now recall that one to one functions have inverses. That is, if \(f\) is one to one, it has an inverse function, denoted by \(f^{-1}\), such that if \(f(a)=b\), then \(f^{-1}(b) = a\). The domain of \(f^{-1}\) is the range of \(f\), and vice-versa. For ease of notation, we set \(g=f^{-1}\) and treat \(g\) as a function of \(x\).
Since \(f(a)=b\) implies \(g(b)=a\), when we compose \(f\) and \(g\) we get a nice result: \[f\big(g(b)\big) = f(a) = b.\] In general, \(f\big(g(x)\big) =x\) and \(g\big(f(x)\big) = x\). This gives us a convenient way to check if two functions are inverses of each other: compose them and if the result is \(x\), then they are inverses (on the appropriate domains.)
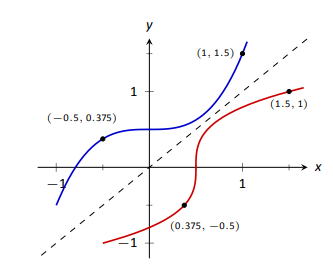
When the point \((a,b)\) lies on the graph of \(f\), the point \((b,a)\) lies on the graph of \(g\). This leads us to discover that the graph of \(g\) is the reflection of \(f\) across the line \(y=x\). In Figure 2.29 we see a function graphed along with its inverse. See how the point \((1,1.5)\) lies on one graph, whereas \((1.5,1)\) lies on the other. Because of this relationship, whatever we know about \(f\) can quickly be transferred into knowledge about \(g\).
For example, consider Figure 2.30 where the tangent line to \(f\) at the point \((a,b)\) is drawn. That line has slope \(f^\prime(a)\). Through reflection across \(y=x\), we can see that the tangent line to \(g\) at the point \((b,a)\) should have slope \( \frac{1}{f^\prime(a)}\). This then tells us that \( g^\prime(b) = \frac{1}{f^\prime(a)}.\)
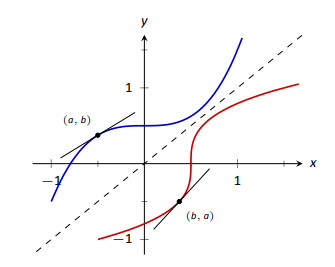
Consider:
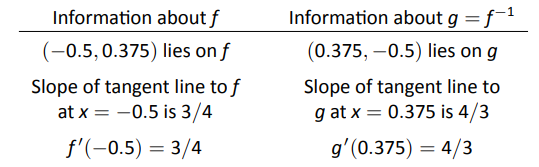
We have discovered a relationship between \(f^\prime\) and \(g^\prime\) in a mostly graphical way. We can realize this relationship analytically as well. Let \(y = g(x)\), where again \(g = f^{-1}\). We want to find \( y^\prime\). Since \(y = g(x)\), we know that \(f(y) = x\). Using the Chain Rule and Implicit Differentiation, take the derivative of both sides of this last equality.
\[\begin{align*}\frac{d}{dx}\Big(f(y)\Big) &= \frac{d}{dx}\Big(x\Big) \\ f^\prime(y)\cdot y^\prime &= 1\\ y^\prime &= \frac{1}{f^\prime(y)}\\ y^\prime &= \frac{1}{f^\prime(g(x))} \end{align*}\]
This leads us to the following theorem.
Theorem 22: Derivatives of Inverse Functions
Let \(f\) be differentiable and one to one on an open interval \(I\), where \(f^\prime(x) \neq 0\) for all \(x\) in \(I\), let \(J\) be the range of \(f\) on \(I\), let \(g\) be the inverse function of \(f\), and let \(f(a) = b\) for some \(a\) in \(I\). Then \(g\) is a differentiable function on \(J\), and in particular,
\(1. \left(f^{-1}\right)^\prime (b)=g^\prime (b) = \frac{1}{f^\prime(a)}\)\quad \text{ and }\quad 2. \left(f^{-1}\right)^\prime (x)=g^\prime (x) = \frac{1}{f^\prime(g(x))}\)
The results of Theorem 22 are not trivial; the notation may seem confusing at first. Careful consideration, along with examples, should earn understanding.
In the next example we apply Theorem 22 to the arcsine function.
Example 75: Finding the derivative of an inverse trigonometric function
Let \(y = \arcsin x = \sin^{-1} x\). Find \(y^\prime\) using Theorem 22.
Solution
Adopting our previously defined notation, let \(g(x) = \arcsin x\) and \(f(x) = \sin x\). Thus \(f^\prime(x) = \cos x\). Applying the theorem, we have
\[\begin{align*} g^\prime (x) &= \frac{1}{f^\prime(g(x))} \\ &= \frac{1}{\cos(\arcsin x)}. \end{align*}\]
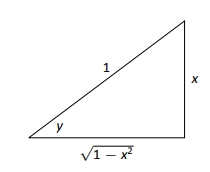
This last expression is not immediately illuminating. Drawing a figure will help, as shown in Figure 2.32. Recall that the sine function can be viewed as taking in an angle and returning a ratio of sides of a right triangle, specifically, the ratio "opposite over hypotenuse.'' This means that the arcsine function takes as input a ratio of sides and returns an angle. The equation \(y=\arcsin x\) can be rewritten as \(y=\arcsin (x/1)\); that is, consider a right triangle where the hypotenuse has length 1 and the side opposite of the angle with measure \(y\) has length \(x\). This means the final side has length \(\sqrt{1-x^2}\), using the Pythagorean Theorem.
\[\text{Therefore }\cos (\sin^{-1} x) = \cos y = \sqrt{1-x^2}/1 = \sqrt{1-x^2},\text{ resulting in }\]\[\frac{d}{dx}\big(\arcsin x\big) = g^\prime (x) = \frac{1}{\sqrt{1-x^2}}.\]
Remember that the input \(x\) of the arcsine function is a ratio of a side of a right triangle to its hypotenuse; the absolute value of this ratio will never be greater than 1. Therefore the inside of the square root will never be negative.
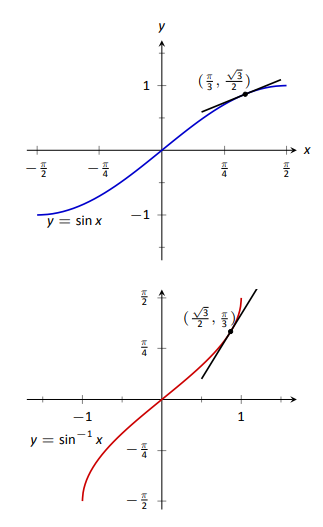
In order to make \(y=\sin x\) one to one, we restrict its domain to \([-\pi/2,\pi/2]\); on this domain, the range is \([-1,1]\). Therefore the domain of \(y=\arcsin x\) is \([-1,1]\) and the range is \([-\pi/2,\pi/2]\). When \(x=\pm 1\), note how the derivative of the arcsine function is undefined; this corresponds to the fact that as \(x\to \pm1\), the tangent lines to arcsine approach vertical lines with undefined slopes.
In Figure 2.33 we see \(f(x) = \sin x\) and \(f^{-1} = \sin^{-1} x\) graphed on their respective domains. The line tangent to \(\sin x\) at the point \((\pi/3, \sqrt{3}/2)\) has slope \(\cos \pi/3 = 1/2\). The slope of the corresponding point on \(\sin^{-1}x\), the point \((\sqrt{3}/2,\pi/3)\), is \[\frac{1}{\sqrt{1-(\sqrt{3}/2)^2}} = \frac{1}{\sqrt{1-3/4}} = \frac{1}{\sqrt{1/4}} = \frac{1}{1/2}=2,\]verifying yet again that at corresponding points, a function and its inverse have reciprocal slopes.
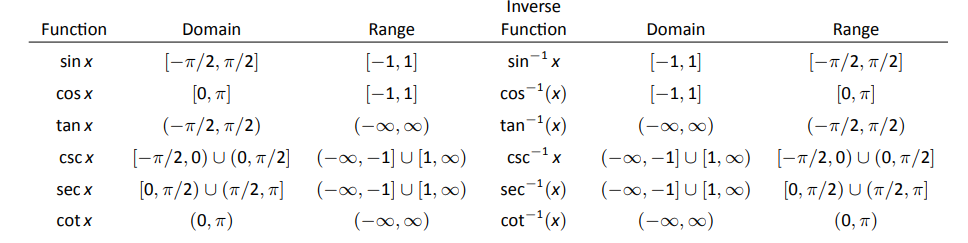
Using similar techniques, we can find the derivatives of all the inverse trigonometric functions. In Figure 2.31 we show the restrictions of the domains of the standard trigonometric functions that allow them to be invertible.
Theorem 23: Derivatives of Inverse Trigonometric Functions
The inverse trigonometric functions are differentiable on all open sets contained in their domains (as listed in Figure 2.31) and their derivatives are as follows:
\[\begin{align} &1. \frac{d}{dx}\big(\sin^{-1}(x)\big) = \frac{1}{\sqrt{1-x^2}} \qquad &&4.\frac{d}{dx}\big(\cos^{-1}(x)\big) = -\frac{1}{\sqrt{1-x^2}} \\ &2.\frac{d}{dx}\big(\sec^{-1}(x)\big) = \frac{1}{|x|\sqrt{x^2-1}} &&5.\frac{d}{dx}\big(\csc^{-1}(x)\big) = -\frac{1}{|x|\sqrt{x^2-1}} \\ &3.\frac{d}{dx}\big(\tan^{-1}(x)\big) = \frac{1}{1+x^2} &&6.\frac{d}{dx}\big(\cot^{-1}(x)\big) = -\frac{1}{1+x^2} \end{align}\]
Note how the last three derivatives are merely the opposites of the first three, respectively. Because of this, the first three are used almost exclusively throughout this text.
In Section 2.3, we stated without proof or explanation that \( \frac{d}{dx}\big(\ln x\big) = \frac{1}{x}\). We can justify that now using Theorem 22, as shown in the example.
Example 76: Finding the derivative of y = ln x
Use Theorem 22 to compute \( \frac{d}{dx}\big(\ln x\big)\).
Solution
View \(y= \ln x\) as the inverse of \(y = e^x\). Therefore, using our standard notation, let \(f(x) = e^x\) and \(g(x) = \ln x\). We wish to find \(g^\prime (x)\). Theorem 22 gives:
\[\begin{align*} g^\prime (x) &= \frac{1}{f^\prime(g(x))} \\ &= \frac{1}{e^{\ln x}} \\ &= \frac{1}{x}. \end{align*}\]
In this chapter we have defined the derivative, given rules to facilitate its computation, and given the derivatives of a number of standard functions. We restate the most important of these in the following theorem, intended to be a reference for further work.
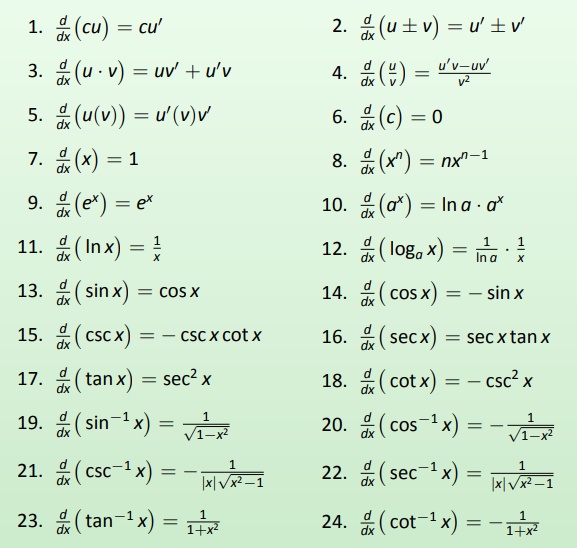
Theorem 24: Glossary of Derivatives of Elementary Functions
Let \(u\) and \(v\) be differentiable functions, and let \(a\), \(c\) and \(n\) be real numbers, \(a>0\), \(n\neq 0\).