
15.4: Normal Subgroups and Group Homomorphisms




- Last updated
- Aug 17, 2021
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Our goal in this section is to answer an open question from earlier in this chapter and introduce a related concept. The question is: When are left cosets of a subgroup a group under the induced operation? This question is open for non-abelian groups. Now that we have some examples to work with, we can try a few experiments.
Normal Subgroups
Example 15.4.1: Cosets of A3
We have seen that A3={i,r1,r2} is a subgroup of S3, and its left cosets are A3 itself and B3={f1,f2,f3}. Whether {A3,B3} is a group boils down to determining whether the induced operation is well defined. Consider the operation table for S3 in Figure 15.4.1.
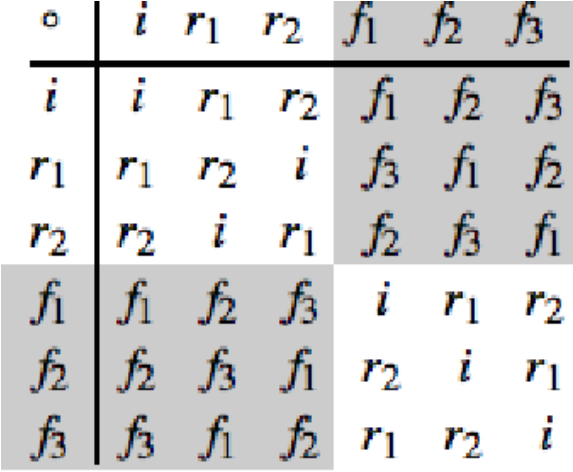 Figure 15.4.1: Operation table for S3
Figure 15.4.1: Operation table for S3We have shaded in all occurrences of the elements of B3 in gray. We will call these elements the gray elements and the elements of A3 the white ones.
Now consider the process of computing the coset product A3∘B3. The “product” is obtained by selecting one white element and one gray element. Note that white “times” gray is always gray. Thus, A3∘B3 is well defined. Similarly, the other three possible products are well defined. The table for the factor group S3/A3 is
∘A3B3A3B3A3B3B3A3
Clearly, S3/A3 is isomorphic to Z2. Notice that A3 and B3 are also the right cosets of A3. This is significant.
Example 15.4.2: Cosets of Another Subgroup of S3
Now let's try the left cosets of ⟨f1⟩ in S3. There are three of them. Will we get a complicated version of Z3? The left cosets are C0=⟨f1⟩, C1=r1⟨f1⟩={r1,f3}, and C2=r2⟨f1⟩={r2,f2}.
The reader might be expecting something to go wrong eventually, and here it is. To determine C1∘C2 we can choose from four pairs of representatives:
r1∈C1,r2∈C2⟶r1∘r2=i∈C0r1∈C1,f2∈C2⟶r1∘f2=f∈C0f3∈C1,r2∈C2⟶f3∘r2=f2∈C2f3∈C1,f2∈C2⟶f3∘f2=r2∈C2
This time, we don't get the same coset for each pair of representatives. Therefore, the induced operation is not well defined and no factor group is produced.
Observation 15.4.1
This last example changes our course of action. If we had gotten a factor group from {C0,C1,C2}, we might have hoped to prove that every collection of left cosets forms a group. Now our question is: How can we determine whether we will get a factor group? Of course, this question is equivalent to: When is the induced operation well defined? There was only one step in the proof of Theorem 15.2.4, where we used the fact that G was abelian. We repeat the equations here:
a′∗b′=(a∗h1)∗(b∗h2)=(a∗b)∗(h1∗h2)
since G was abelian.
The last step was made possible by the fact that h1∗b=b∗h1. As the proof continued, we used the fact that h1∗h2 was in H and so a′∗b′ is (a∗b)∗h for some h in H. All that we really needed in the “abelian step” was that h1∗b=b∗(something in H)=b∗h3. Then, since H is closed under G's operation, h3∗h2 is an element of H. The consequence of this observation is that we define a certain kind of subgroup that guarantees that the inducted operation is well-defined.
Definition 15.4.1: Normal Subgroup
If G is a group, H≤G, then H is a normal subgroup of G, denoted H◃G, if and only if every left coset of H is a right coset of H; i. e. a∗H=H∗a∀a∈G
Theorem 15.4.1
If H≤G, then the operation induced on left cosets of H by the operation of G is well defined if and only if any one of the following conditions is true:
- H is a normal subgroup of G.
- If h∈H, a∈G, then there exists h′∈H such that h∗a=a∗h′.
- If h∈H, a∈G, then a−1∗h∗a∈H.
- Proof
-
We leave the proof of this theorem to the reader.
Be careful, the following corollary is not an “...if and only if...” statement.
Corollary 15.4.1
If H≤G, then the operation induced on left cosets of H by the operation of G is well defined if either of the following two conditions is true.
- G is abelian.
- |H|=|G|2.
Example 15.4.3: A Non-Normal Subgroup
The right cosets of ⟨f1⟩≤S3 are {i,f1}, {r1f2}, and {r2,f3}. These are not the same as the left cosets of ⟨f1⟩. In addition, f2−1f1f2=f2f1f2=f3∉⟨f1⟩. Thus, ⟨f1⟩ is not normal.
The improper subgroups {e} and G of any group G are normal subgroups. G/{e} is isomorphic to G. All other normal subgroups of a group, if they exist, are called proper normal subgroups.
Example 15.4.4
By Condition b of Corollary 15.4.1, An is a normal subgroup of Sn and Sn/An is isomorphic to Z2.
Example 15.4.5: Subgroups of A5
A5, a group in its own right with 60 elements, has many proper subgroups, but none are normal. Although this could be done by brute force, the number of elements in the group would make the process tedious. A far more elegant way to approach the verification of this statement is to use the following fact about the cycle structure of permutations. If f∈Sn is a permutation with a certain cycle structure, σ1σ2⋯σk, where the length of σi is ℓi, then for any g∈Sn, g−1∘f∘g, which is the conjugate of f by g, will have a cycle structure with exactly the same cycle lengths. For example if we take f=(1,2,3,4)(5,6)(7,8,9)∈S9 and conjugate by g=(1,3,5,7,9),
g−1∘f∘g=(1,9,7,5,3)∘(1,2,3,4)(5,6)(7,8,9)∘(1,3,5,7,9)=(1,4,9,2)(3,6)(5,8,7)
Notice that the condition for normality of a subgroup H of G is that the conjugate of any element of H by an element of G must be remain in H.
To verify that A5 has no proper normal subgroups, you can start by cataloging the different cycle structures that occur in A5 and how many elements have those structures. Then consider what happens when you conjugate these different cycle structures with elements of A5. An outline of the process is in the exercises.
Example 15.4.6
Let G be the set of two by two invertible matrices of real numbers. That is,
G={(abcd)∣a,b,c,d∈R,ad−bc≠0}
We saw in Chapter 11 that G is a group with matrix multiplication.
This group has many subgroups, but consider just two: H1={(a00a)|a≠0} and H2={(a00d)|ad≠0}. It is fairly simple to apply one of the conditions we have observed for normallity that H1 a normal subgroup of G, while H2 is not normal in G.
Homomorphisms
Think of the word isomorphism. Chances are, one of the first images that comes to mind is an equation something like
θ(x∗y)=θ(x)⋄θ(y)
An isomorphism must be a bijection, but the equation above is the algebraic property of an isomorphism. Here we will examine functions that satisfy equations of this type.
Definition 15.4.2: Homomorphism
Let [G;∗] and [G′;⋄] be groups. θ:G→G′ is a homomorphism if θ(x∗y)=θ(x)⋄θ(y) for all x,y∈G.
Many homomorphisms are useful since they point out similarities between the two groups (or, on the universal level, two algebraic systems) involved.
Example 15.4.7: Decreasing Modularity
Define α:Z6→Z3 by α(n)=n mod 3. Therefore, α(0)=0, α(1)=1, α(2)=2, α(3)=1+1+1=0, α(4)=1, and α(5)=2. If n,m∈Z6. We could actually show that α is a homomorphism by checking all 62=36 different cases for the formula
α(n+6m)=α(n)+3α(m)
but we will use a line of reasoning that generalizes. We have already encountered the Chinese Remainder Theorem, which implies that the function β:Z6→Z3×Z2 defined by β(n)=(n mod 3,n mod 2). We need only observe that equating the first coordinates of both sides of the equation
β(n+6m)=β(n)+β(m)
gives us precisely the homomorphism property.
Theorem 15.4.2: Group Homomorphism Properties
If θ:G→G′ is a homomorphism, then:
- θ(e)=θ(the identity of G)=the identity of G′=e′.
- θ(a−1)=θ(a)−1 for all a∈G.
- If H≤G, then θ(H)={θ(h)|h∈H}≤G′.
- Proof
-
- Let a be any element of G. Then θ(a)∈G′.
θ(a)⋄e′=θ(a) by the definition of e′=θ(a∗e) by the definition of e=θ(a)⋄θ(e) by the fact that θ is a homomorphism
By cancellation, e′=θ(e). - Again, let a∈G. e′=θ(e)=θ(a∗a−1)=θ(a)⋄θ(a−1). Hence, by the uniqueness of inverses, θ(a)−1=θ(a−1).
- Let b1,b2∈θ(H). Then there exists a1,a2∈H such that θ(a1)=b1, θ(a2)=b2. Recall that a compact necessary and sufficient condition for H≤G is that x∗y−1∈H for all x,y∈H. Now we apply the same condition in G′:
b1⋄b2−1=θ(a1)⋄θ(a2)−1=θ(a1)⋄θ(a2−1)=θ(a1∗a2−1)∈θ(H)
since a1∗a2−1∈H, and so we can conclude that θ(H)≤G′.
- Let a be any element of G. Then θ(a)∈G′.
Corollary 15.4.2
Since a homomorphism need not be a surjection and part (c) of Theorem 15.4.2 is true for the case of H=G, the range of θ, θ(G), is a subgroup of G′
Example 15.4.8
If we define π:Z→Z/4Z by π(n)=n+4Z, then π is a homomorphism. The image of the subgroup 4Z is the single coset 0+4Z, the identity of the factor group. Homomorphisms of this type are called natural homomorphisms. The following theorems will verify that π is a homomorphism and also show the connection between homomorphisms and normal subgroups. The reader can find more detail and proofs in most abstract algebra texts.
Theorem 15.4.3
If H◃G, then the function π:G→G/H defined by π(a)=aH is a homomorphism.
- Proof
-
We leave the proof of this theorem to the reader.
Definition 15.4.3: Natural Homomorphism
If H◃G, then the function π:G→G/H defined by π(a)=aH is called the natural homomorphism.
Based on Theorem 15.4.3, every normal subgroup gives us a homomorphism. Next, we see that the converse is true.
Definition 15.4.4: Kernel of a Homomorphism
Let θ:G→G′ be a homomorphism, and let e and e′ be the identities of G and G′, respectively. The kernel of θ is the set kerθ={a∈G∣θ(a)=e′}
Theorem 15.4.4
Let θ:G→G′ be a homomorphism from G into G′ . The kernel of θ is a normal subgroup of G.
- Proof
-
Let K=ker θ. We can see that K is a subgroup of G by letting a,b∈K and verify that a∗b−1∈K by computing θ(a∗b−1)=θ(a)∗θ(b)−1=e′∗e′−1=e′. To prove normality, we let g be any element of G and k∈K. We compute θ(g∗k∗g−1) to verify that g∗k∗g−1∈K.
θ(g∗k∗g−1)=θ(g)∗θ(k)∗θ(g−1)=θ(g)∗θ(k)∗θ(g)−1=θ(g)∗e′∗θ(g)−1=θ(g)∗θ(g)−1=e′
Based on this most recent theorem, every homomorphism gives us a normal subgroup.
Theorem 15.4.5: Fundamental Theorem of Group Homomorphisms
Let θ:G→G′ be a homomorphism. Then θ(G) is isomorphic to G/kerθ.
Example 15.4.9
Define θ:Z→Z10 by θ(n)=n mod 10. The three previous theorems imply the following:
- π:Z→Z/10Z defined by π(n)=n+10Z is a homomorphism.
- {n∈Z|θ(n)=0}={10n∣n∈Z}=10Z◃Z.
- Z/10Z is isomorphic to Z10.
Example 15.4.10
Let G be the same group of two by two invertible real matrices as in Example 15.4.6. Define Φ:G→G by Φ(A)=A√|detA|. We will let the reader verify that Φ is a homomorphism. The theorems above imply the following.
- kerΦ={A∈G|Φ(A)=I}={(a00a)∣a∈R,a≠0}◃G. This verifies our statement in Example 15.4.6. As in that example, let kerΦ=H1.
- G/H1 is isomorphic to {A∈G∣detA=1}.
- π:G→G/H1 defined, naturally, by π(A)=AH1 is a homomorphism.
For the remainder of this section, we will be examining certain kinds of homomorphisms that will play a part in our major application to homomorphisms, coding theory.
Example 15.4.11
Consider Φ:Z22→Z23 defined by Φ(a,b)=(a,b,a+2b). If (a1,b1),(a2,b2)∈Z22,
Φ((a1,b1)+(a2,b2))=Φ(a1+2a2,b1+2b2)=(a1+2a2,b1+2b2,a1+2a2+2b1+2b2)=(a1,b1,a1+2b1)+(a2,b2,a2+2b2)=Φ(a1,b1)+Φ(a2,b2)
Since Φ(a,b)=(0,0,0) implies that a=0 and b=0, the kernel of Φ is {(0,0)}. By previous theorems, Φ(Z22)={(0,0,0),(1,0,1),(0,1,1),(1,1,0)} is isomorphic to Z22.
We can generalize the previous example as follows: If n,m≥1 and A is an m×n matrix of 0's and 1's (elements of Z2), then Φ:Z2m→Z2n defined by
Φ(a1,a2,...,am)=(a1,a2,...,am)A
is a homomorphism. This is true because matrix multiplication is distributive over addition. The only new idea here is that computation is done in Z2. If a=(a1,a2,...,am) and b=(b1,b2,...,bm), (a+b)A=aA+bA is true by basic matrix laws. Therefore, Φ(a+b)=Φ(a)+Φ(b).
Exercises
Exercise 15.4.1
Which of the following functions are homomorphisms? What are the kernels of those functions that are homomorphisms?
- θ1:R∗→R+ defined by θ1(a)=|a|.
- θ2:Z5→Z2 where θ2(n)={0 if n is even1 if n is odd.
- θ3:R×R→R, where θ3(a,b)=a+b.
- θ4:S4→S4 defined by θ4(f)=f∘f=f2.
- Answer
-
- Yes, the kernel is {1,−1}
- No, since θ2(2+54)=θ2(1)=1, but θ2(2)+2θ2(4)=0+20=0
A follow-up might be to ask what happens if 5 is replaced with some other positive integer in this part. - Yes, the kernel is {(a,−a)|a∈R}
- No. A counterexample, among many, would be to consider the two transpositions t1=(1,3) and t2=(1,2). Compare θ4(t1∘t2) and θ4(t1)∘θ4(t2).
Exercise 15.4.2
Which of the following functions are homomorphisms? What are the kernels of those functions that are homomorphisms?
- α1:M2×2(R)→R, defined by α1(A)=A11A22+A12A21.
- α2:(R∗)2→R∗ defined by α2(a,b)=ab.
- α3:{A∈M2×2(R)|detA≠0}→R∗, where α3(A)=detA.
- α4:S4→S4 defined by α4(f)=f−1.
Exercise 15.4.3
Show that D4 has one proper normal subgroup, but that ⟨(1,4)(2,3)⟩ is not normal.
- Answer
-
⟨r⟩={i,r,r2,r3} is a normal subgroup of D4. To see you could use the table given in the solution of Exercise 15.3.5 of Section 15.3 and verify that a−1ha∈⟨r⟩ for all a∈D4 and h∈⟨r⟩. A more efficient approach is to prove the general theorem that if H is a subgroup G with exactly two distinct left cosets, than H is normal. ⟨f1⟩ is not a normal subgroup of D4. ⟨f1⟩={i,f1} and if we choose a=r and h=f1 then a−1ha=r3f1r=f2∉⟨f1⟩
Exercise 15.4.4
Prove that the function Φ in Example 15.4.10 is a homomorphism.
Exercise 15.4.5
Define the two functions α:Z23→Z24 and β:Z24→Z2 by α(a1,a2,a3)=(a1,a2,a3,a1+2a2+2a3), and β(b1,b2,b3,b4)=b1+b2+b3+b4 Describe the function β∘α. Is it a homomorphism?
- Answer
-
(β∘α)(a1,a2,a3)=0 and so β∘α is the trivial homomorphism, but a homomorphism nevertheless.
Exercise 15.4.6
Express Φ in Example 15.4.10 in matrix form.
Exercise 15.4.7
Prove that if G is an abelian group, then q(x)=x2 defines a homomorphism from G into G. Is q ever an isomorphism?
- Answer
-
Let x,y∈G.
q(x∗y)=(x∗y)2=x∗y∗x∗y=x∗x∗y∗y since G is abelian=x2∗y2=q(x)∗q(y)
Hence, q is a homomorphism. In order for q to be an isomorphism, it must be the case that no element other than the identity is its own inverse.
x∈Ker(q)⇔q(x)=e⇔x∗x=e⇔x−1=x
Exercise 15.4.8
Prove that if θ:G→G′ is a homomorphism, and H◃G, then θ(H)◃θ(G). Is it also true that θ(H)◃G′?
Exercise 15.4.9
Prove that if θ:G→G′ is a homomorphism, and H′≤θ(G), then θ−1(H′)={a∈G|θ(a)∈H′}≤G.
- Answer
-
Proof: Recall that the inverse image of H′ under θ is θ−1(H′)={g∈G|θ(g)∈H′}.
Closure: Let g1,g2∈θ−1(H′), then θ(g1),θ(g2)∈H′. Since H′ is a subgroup of G′,
θ(g1)⋄θ(g2)=θ(g1∗g2)∈H′⇒g1∗g2∈θ−1(H′)
Identity: By Theorem 15.4.2(a), e∈θ−1(H′).
Inverse: Let a∈θ−1(H′) . Then θ(a)∈H′ and by Theorem 15.4.2(b), θ(a)−1=θ(a−1)∈H′ and so a−1∈θ−1(H′).
Exercise 15.4.10
Following up on Example 15.4.5, prove that A5 is a simple group; i. e., it has no proper normal subgroups.
- Make a list of the different cycle structures that occur in A5 and how many elements have those structures.
- Within each set of permutations with different cycle structures, identify which subsets are closed with respect to the conjugation operation. With this you will have a partition of A5 into conjugate classes where for each class, C, f,g∈C if and only if ∃ϕ∈A5 such that ϕ−1∘f∘ϕ=g.
- Use the fact that a normal subgroup of A5 needs to be a union of conjugate classes and verify that no such union exists.