
5.3: Inverse Trigonometric Functions

- Last updated
- Sep 16, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
We have briefly mentioned the inverse trigonometric functions before, for example in Section 1.3 when we discussed how to use the sin−1, cos−1, and tan−1 buttons on a calculator to find an angle that has a certain trigonometric function value. We will now define those inverse functions and determine their graphs.
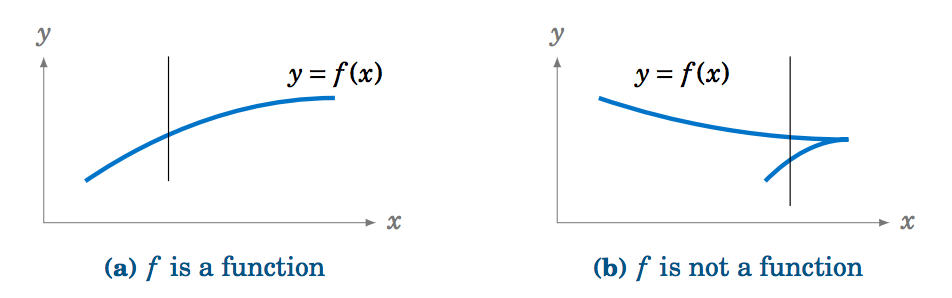
Recall that a function is a rule that assigns a single object y from one set (the range to each object x from another set (the domain). We can write that rule as y=f(x), where f is the function (see Figure 5.3.1). There is a simple vertical rule for determining whether a rule y=f(x) is a function: f is a function if and only if every vertical line intersects the graph of y=f(x) in the xy-coordinate plane at most once (see Figure 5.3.2).
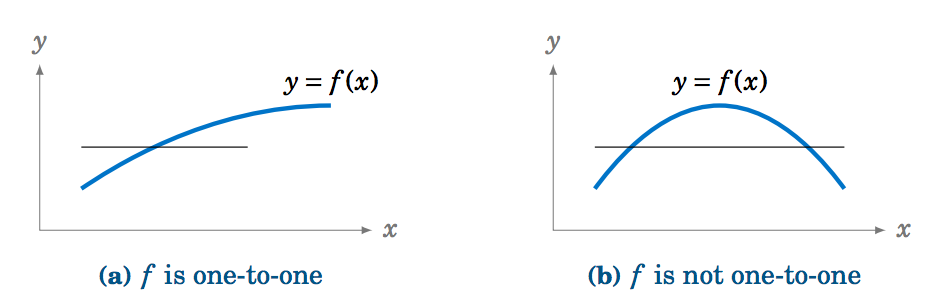
Recall that a function f is one-to-one (often written as 1−1) if it assigns distinct values of y to distinct values of x. In other words, if x1≠x2 then f(x1)≠f(x2). Equivalently, f is one-to-one if f(x1)=f(x2) implies x1=x2. There is a simple horizontal rule for determining whether a function y=f(x) is one-to-one: f is one-to-one if and only if every horizontal line intersects the graph of y=f(x) in the xy-coordinate plane at most once (see Figure 5.3.3).
If a function f is one-to-one on its domain, then f has an inverse function, denoted by f−1, such that y=f(x) if and only if f−1(y)=x. The domain of f−1 is the range of f.
The basic idea is that f−1 "undoes'' what f does, and vice versa. In other words,
f−1(f(x)) = xfor all x in the domain of f, andf(f−1(y)) = yfor all y in the range of f.
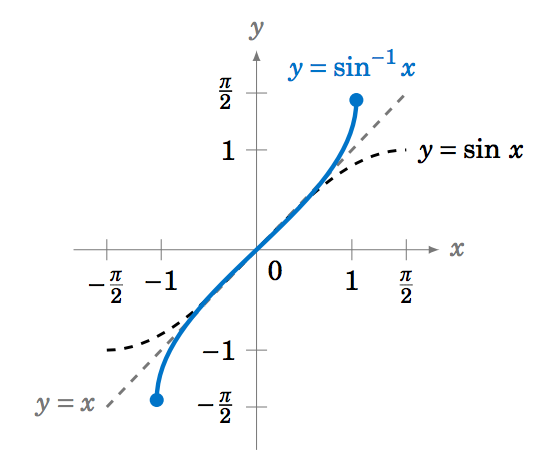
We know from their graphs that none of the trigonometric functions are one-to-one over their entire domains. However, we can restrict those functions to subsets of their domains where they are one-to-one. For example, y=sinx is one-to-one over the interval [−π2,π2], as we see in the graph below:
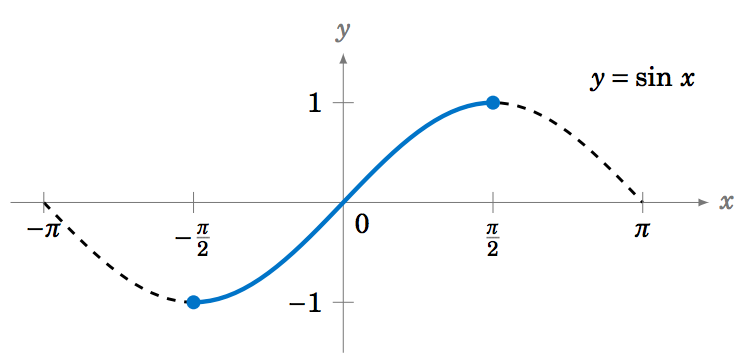
For −π2≤x≤π2 we have −1≤sinx≤1, so we can define the inverse sine function y=sin−1x (sometimes called the arc sine and denoted by y=arcsinx) whose domain is the interval [−1,1] and whose range is the interval [−π2,π2]. In other words:
sin−1(siny) = yfor −π2≤y≤π2sin(sin−1x) = xfor −1≤x≤1
Find sin−1(sinπ4).
Solution
Since −π2≤π4≤π2, we know that sin−1(sinπ4)=π4, by Equation 5.3.2.
Find sin−1(sin5π4).
Solution
Since 5π4>π2, we can not use Equation 5.3.2. But we know that sin5π4=−1√2. Thus, sin−1(sin5π4)=sin−1(−1√2) is, by definition, the angle y such that −π2≤y≤π2 and siny=−1√2. That angle is y=−π4, since
sin(−π4) = −sin(π4) = −1√2 .
Thus, sin−1(sin5π4)=−π4.
Example 5.14 illustrates an important point: sin−1x should always be a number between −π2 and π2. If you get a number outside that range, then you made a mistake somewhere. This why in Example 1.27 in Section 1.5 we got sin−1(−0.682)=−43∘ when using the sin−1 button on a calculator. Instead of an angle between 0∘ and 360∘ (i.e. 0 to 2π radians) we got an angle between −90∘ and 90∘ (i.e. −π2 to π2 radians).
In general, the graph of an inverse function f−1 is the reflection of the graph of f around the line y=x. The graph of y=sin−1x is shown in Figure 5.3.5. Notice the symmetry about the line y=x with the graph of y=sinx.
The inverse cosine function y=cos−1x (sometimes called the arc cosine and denoted by y=arccosx) can be determined in a similar fashion. The function y=cosx is one-to-one over the interval [0,π], as we see in the graph below:
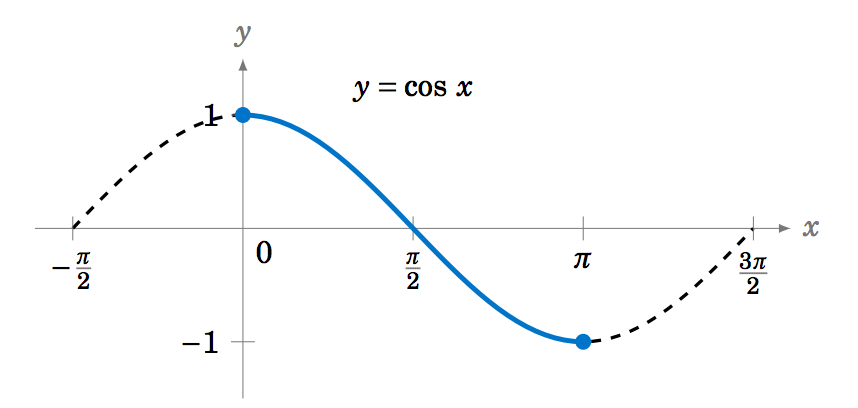
Thus, y=cos−1x is a function whose domain is the interval [−1,1] and whose range is the interval [0,π]. In other words:
cos−1(cosy) = yfor 0≤y≤πcos(cos−1x) = xfor −1≤x≤1
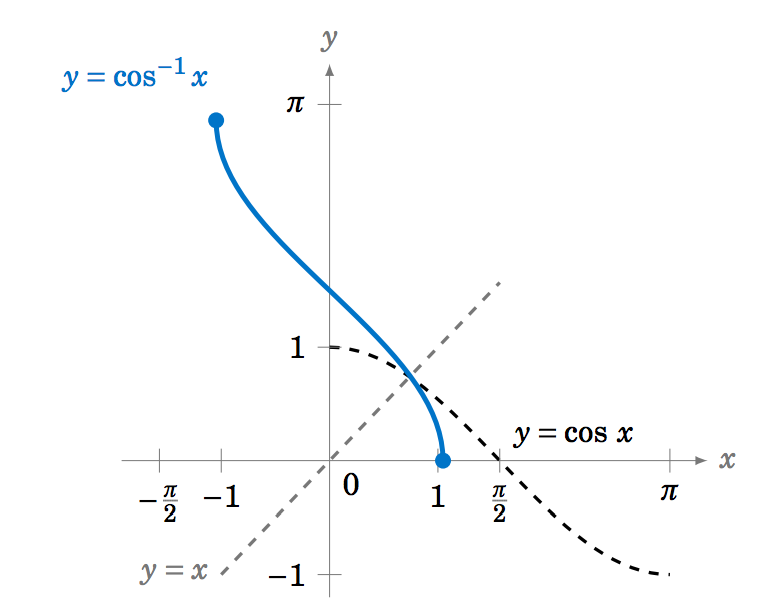
The graph of y=cos−1x is shown below in Figure 5.3.7. Notice the symmetry about the line y=x with the graph of y=cosx.
Find cos−1(cosπ3).
Solution
Since 0≤π3≤π, we know that cos−1(cosπ3)=π3, by Equation 5.3.6.
Find cos−1(cos4π3).
Solution
Since 4π3>π, we can not use Equation 5.3.6. But we know that cos4π3=−12. Thus, cos−1(cos4π3)=cos−1(−12) is, by definition, the angle y such that 0≤y≤π and cosy=−12. That angle is y=2π3 (i.e. 120∘). Thus, cos−1(cos4π3)=2π3.
Examples 5.14 and 5.16 may be confusing, since they seem to violate the general rule for inverse functions that f−1(f(x))=x for all x in the domain of f. But that rule only applies when the function f is one-to-one over its entire domain. We had to restrict the sine and cosine functions to very small subsets of their entire domains in order for those functions to be one-to-one. That general rule, therefore, only holds for x in those small subsets in the case of the inverse sine and inverse cosine.
The inverse tangent function y=tan−1x (sometimes called the arc tangent and denoted by y=arctanx) can be determined similarly. The function y=tanx is one-to-one over the interval (−π2,π2), as we see in Figure 5.3.8:
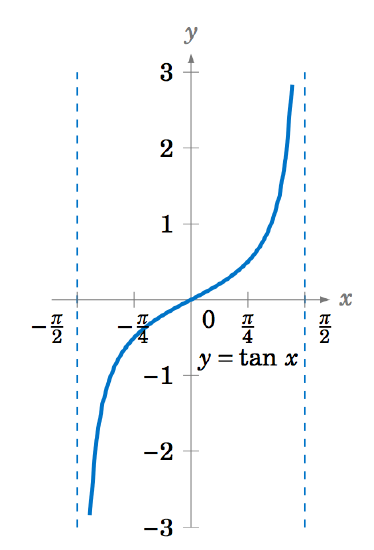
The graph of y=tan−1x is shown below in Figure 5.3.9. Notice that the vertical asymptotes for y=tanx become horizontal asymptotes for y=tan−1x. Note also the symmetry about the line y=x with the graph of y=tanx.
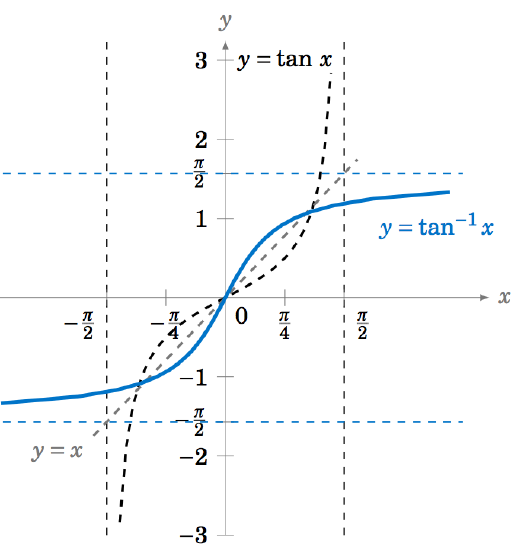
Thus, y=tan−1x is a function whose domain is the set of all real numbers and whose range is the interval (−π2,π2). In other words:
tan−1(tany) = yfor −π2<y<π2tan(tan−1x) = xfor all real x
Find tan−1(tanπ4).
Solution
Since −π2≤π4≤π2, we know that tan−1(tanπ4)=π4, by Equation 5.3.9.
Find tan−1(tanπ).
Solution
Since π>π2, we can not use Equation 5.3.9. But we know that tanπ=0. Thus, tan−1(tanπ)=tan−10 is, by definition, the angle y such that −π2≤y≤π2 and tany=0. That angle is y=0. Thus, tan−1(tanπ)=0.
Find the exact value of cos(sin−1(−14)).
Solution
Let θ=sin−1(−14). We know that −π2≤θ≤π2, so since sinθ=−14<0, θ must be in QIV. Hence cosθ>0. Thus,
cos2θ = 1 − sin2θ = 1 − (−14)2 = 1516⇒cosθ = √154 .
Note that we took the positive square root above since cosθ>0. Thus, cos(sin−1(−14))=√154.
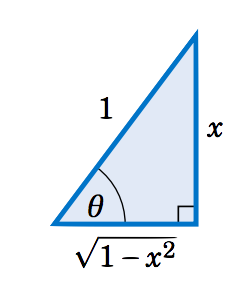
Show that tan(sin−1x)=x√1−x2 for −1<x<1.
Solution
When x=0, the Equation holds trivially, since
tan(sin−10) = tan0 = 0 = 0√1−02 .
Now suppose that 0<x<1. Let θ=sin−1x. Then θ is in QI and sinθ=x. Draw a right triangle with an angle θ such that the opposite leg has length x and the hypotenuse has length 1, as in Figure 5.3.10 (note that this is possible since 0<x<1). Then sinθ=x1=x. By the Pythagorean Theorem, the adjacent leg has length √1−x2. Thus, tanθ=x√1−x2.
If −1<x<0 then θ=sin−1x is in QIV. So we can draw the same triangle except that it would be "upside down'' and we would again have tanθ=x√1−x2, since the tangent and sine have the same sign (negative) in QIV. Thus, tan(sin−1x)=x√1−x2 for −1<x<1.
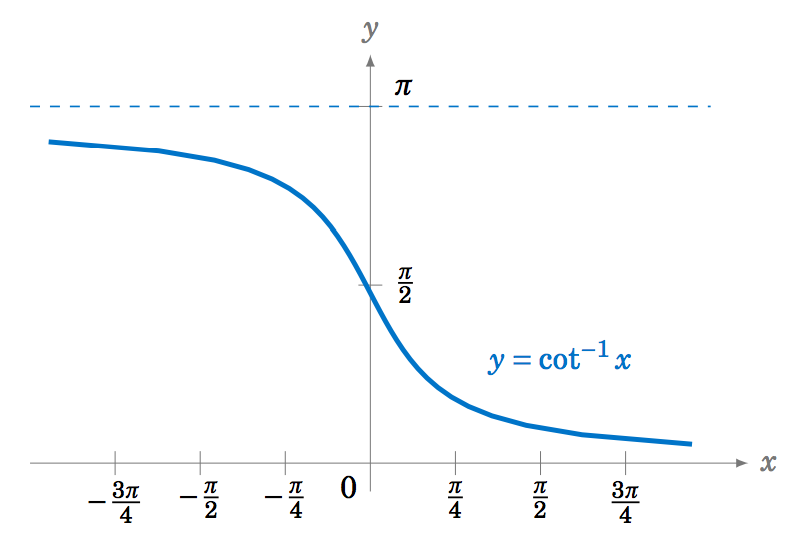
The inverse functions for cotangent, cosecant, and secant can be determined by looking at their graphs. For example, the function y=cotx is one-to-one in the interval (0,π), where it has a range equal to the set of all real numbers. Thus, the inverse cotangent y=cot−1x is a function whose domain is the set of all real numbers and whose range is the interval (0,π). In other words:
cot−1(coty) = yfor 0<y<πcot(cot−1x) = xfor all real x
The graph of y=cot−1x is shown below in Figure 5.3.11.
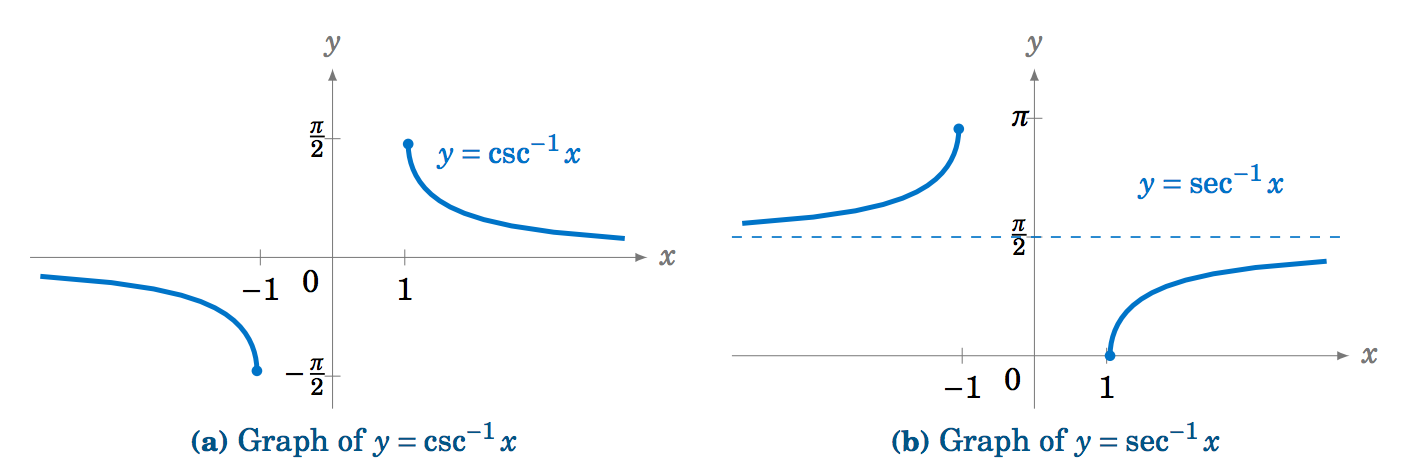
Similarly, it can be shown that the inverse cosecant y=csc−1x is a function whose domain is |x|≥1 and whose range is −π2≤y≤π2, y≠0. Likewise, the inverse secant y=sec−1x is a function whose domain is |x|≥1 and whose range is 0≤y≤π, y≠π2.
csc−1(cscy) = yfor −π2≤y≤π2, y≠0csc(csc−1x) = xfor |x|≥1
sec−1(secy) = yfor 0≤y≤π, y≠π2sec(sec−1x) = xfor |x|≥1
It is also common to call cot−1x, csc−1x, and sec−1x the arc cotangent, arc cosecant, and arc secant, respectively, of x. The graphs of y=csc−1x and y=sec−1x are shown in Figure 5.3.12:
Prove the identity tan−1x+cot−1x = π2.
Solution:
Let θ=cot−1x. Using relations from Section 1.5, we have
tan(π2−θ) = −tan(θ−π2) = cotθ = cot(cot−1x) = x ,
by Equation 5.3.15. So since tan(tan−1x)=x for all x, this means that tan(tan−1x)=tan(π2−θ). Thus, tan(tan−1x)=tan(π2−cot−1x). Now, we know that 0<cot−1x<π, so −π2<π2−cot−1x<π2, i.e. π2−cot−1x is in the restricted subset on which the tangent function is one-to-one. Hence, tan(tan−1x)=tan(π2−cot−1x) implies that tan−1x=π2−cot−1x, which proves the identity.
Is tan−1a+tan−1b = tan−1(a+b1−ab) an identity?
Solution
In the tangent addition Equation tan(A+B)=tanA+tanB1−tanA tanB, let A=tan−1a and B=tan−1b. Then
tan(tan−1a+tan−1b) = tan(tan−1a)+tan(tan−1b)1−tan(tan−1a) tan(tan−1b)= a+b1−abby Equation 5.3.10, so it seems that we havetan−1a+tan−1b = tan−1(a+b1−ab)
by definition of the inverse tangent. However, recall that −π2<tan−1x<π2 for all real numbers x. So in particular, we must have −π2<tan−1(a+b1−ab)<π2. But it is possible that tan−1a+tan−1b is not in the interval (−π2,π2). For example,
tan−11+tan−12 = 1.892547 > π2≈1.570796 .
And we see that tan−1(1+21−(1)(2))=tan−1(−3)=−1.249045≠tan−11+tan−12. So the Equation is only true when −π2<tan−1a+tan−1b<π2.