
1.6.4.1: Degrees, hours and kilometers- measurement data

- Last updated
- Jan 17, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
It is extremely important that temperature and distance change smoothly and continuously. This means, that if we have two different measures of the temperature, we can always imagine an intermediate value. Any two temperature or distance measurements form an interval including an infinite amount of other possible values. Thus, our first data type is called measurement, or interval. Measurement data is similar to the ideal endless ruler where every tick mark corresponds to a real number.
However, measurement data do not always change smoothly and continuously from negative infinity to positive infinity. For example, temperature corresponds to a ray and not a line since it is limited with an absolute zero (
It is even more interesting to measure angles. Angles change continuously, but after 359
Sometimes, collecting measurement data requires expensive or rare equipment and complex protocols. For example, to estimate the colors of flowers as a continuous variable, you would (as minimum) have to use spectrophotometer to measure the wavelength of the reflected light (a numerical representation of visible color).
Now let us consider another example. Say, we are counting the customers in a shop. If on one day there were 947 people, and 832 on another, we can easily imagine values in between. It is also evident that on the first day there were more customers. However, the analogy breaks when we consider two consecutive numbers (like 832 and 831) because, since people are not counted in fractions, there is no intermediate. Therefore, these data correspond better to natural then to real numbers. These numbers are ordered, but not always allow intermediates and are always non-negative. They belong to a different type of measurement data—not continuous, but discreteI
Related with definition of measurement data is the idea of parametricity. With that approach, inferential statistical methods are divided into parametric and nonparametric. Parametric methods are working well if:
- Data type is continuous measurement.
- Sample size is large enough (usually no less then 30 individual observations).
- Data distribution is normal or close to it. This data is often called “normal”, and this feature—“normality”.
Should at least one of the above assumptions to be violated, the data usually requires nonparametric methods. An important advantage of nonparametric tests is their ability to deal with data without prior assumptions about the distribution. On the other hand, parametric methods are more powerful: the chance of find an existing pattern is higher because nonparametric algorithms tend to “mask” differences by combining individual observations into groups. In addition, nonparametric methods for two and more samples often suffer from sensitivity to the inequality of sample distributions.
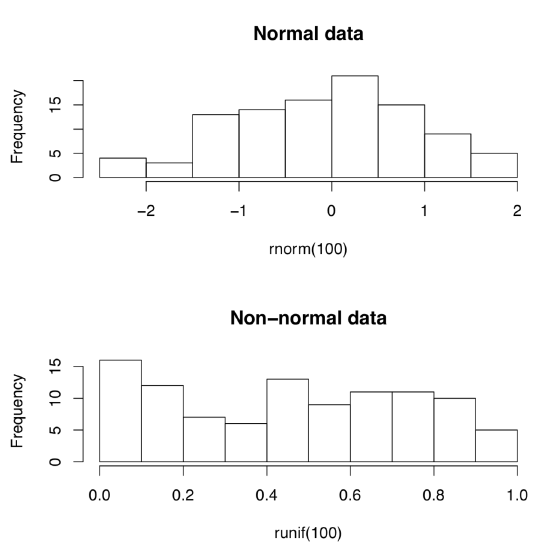
Let us create normal and non-normal data artificially:
Code
(First command creates 10 random numbers which come from normal distribution. Second creates numbers from uniform distribution
But how to tell normal from non-normal? Most simple is the visual way, with appropriate plots (Figure
Code
(Do you see the difference? Histograms are good to check normality but there are better plots—see next chapter for more advanced methods.)
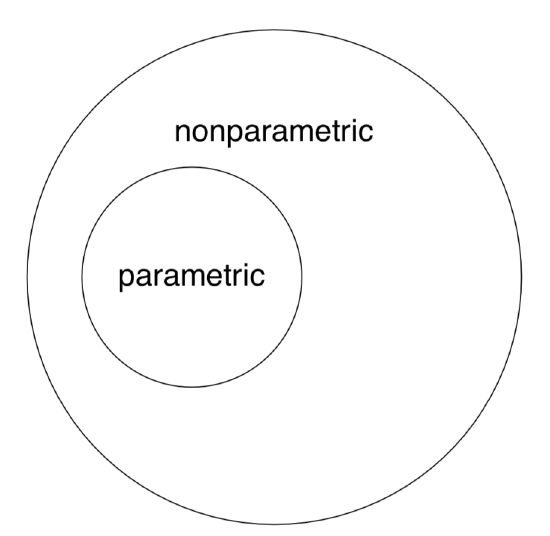
Note again that nonparametric methods are applicable to both “nonparametric” and “parametric” data whereas the opposite is not true (Figure
By the way, this last figure (Euler diagram) was created with R by typing the following commands:
Code
(We used plotrix package which has the draw.circle() command defined. As you see, one may use R even for these exotic purposes. However, diagrams are better to draw in specialized applications like Inkscape.)
Measurement data are usually presented in R as numerical vectors. Often, one vector corresponds with one sample. Imagine that we have data on heights (in cm) of the seven employees in a small firm. Here is how we create a simple vector:
 Figure
Figure Code
As you learned from the previous chapter, x is the name of the R object, <- is an assignment operator, and c() is a function to create vector. Every R object has a structure:
Code
Function str() shows that x is a num, numerical vector. Here is the way to check if an object is a vector:
Code
There are many is.something()-like functions in R, for example:
Code
There are also multiple as.something()-like conversion functions.
 Figure
Figure To sort heights from smallest to biggest, use:
Code
To reverse results, use:
Code
Measurement data is somehow similar to the common ruler, and R package vegan has a ruler-like linestack() plot useful for plotting linear vectors:
One of simple but useful plots is the linestack() timeline plot from vegan package (Figure
Code
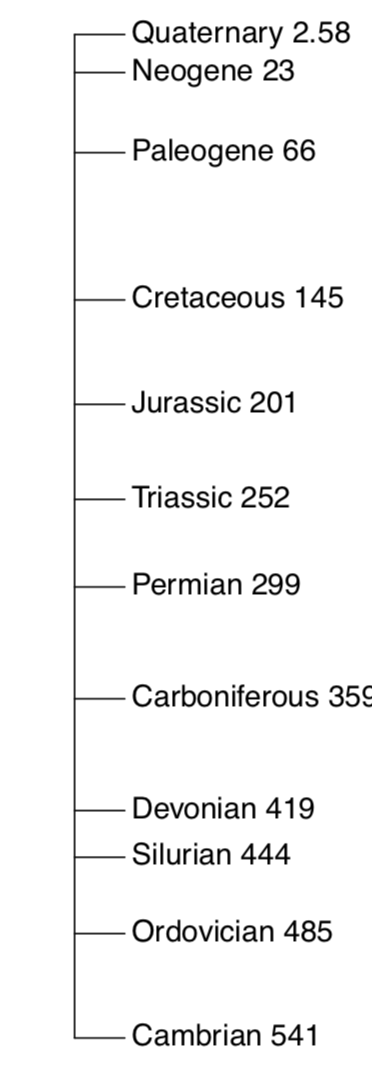 Figure
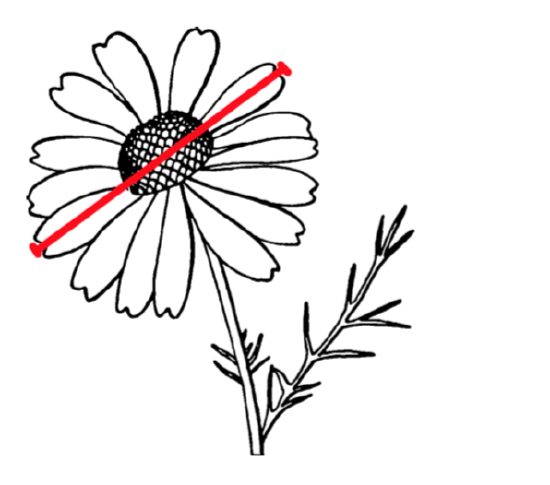
Figure In the open repository, file compositae.txt contains results of flowering heads measurements for many species of aster family (Compositae). In particular, we measured the overall diameter of heads (variable HEAD.D) and counted number of rays (“petals”, variable RAYS, see Figure
 Figure
Figure References
1. Discrete measurement data are in fact more handy to computers: as you might know, processors are based on 0/1 logic and do not readily understand non-integral, floating numbers.
2. For unfamiliar words, please refer to the glossary in the end of book.