8.4: The Unit Step Function




- Last updated
- Dec 30, 2022
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
In the next section we’ll consider initial value problems
ay″+by′+cy=f(t),y(0)=k0,y′(0)=k1,
where a, b, and c are constants and f is piecewise continuous. In this section we’ll develop procedures for using the table of Laplace transforms to find Laplace transforms of piecewise continuous functions, and to find the piecewise continuous inverses of Laplace transforms.
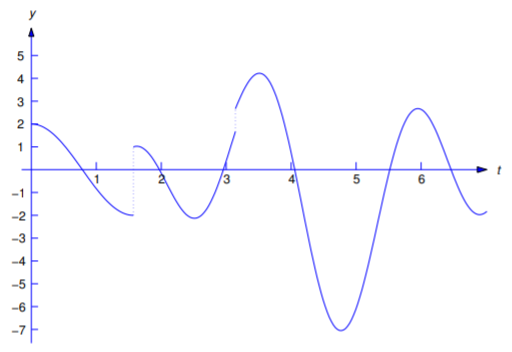
Use the table of Laplace transforms to find the Laplace transform of
f(t)={2t+1,0≤t<2,3t,t≥2
(Figure 8.4.1 ).
Solution
Since the formula for f changes at t=2, we write
L(f)=∫∞0e−stf(t)dt=∫20e−st(2t+1)dt+∫∞2e−st(3t)dt.
To relate the first term to a Laplace transform, we add and subtract
∫∞2e−st(2t+1)dt
in Equation 8.4.3 to obtain
L(f)=∫∞0e−st(2t+1)dt+∫∞2e−st(3t−2t−1)dt=∫∞0e−st(2t+1)dt+∫∞2e−st(t−1)dt=L(2t+1)+∫∞2e−st(t−1)dt.
To relate the last integral to a Laplace transform, we make the change of variable x=t−2 and rewrite the integral as
∫∞2e−st(t−1)dt=∫∞0e−s(x+2)(x+1)dx=e−2s∫∞0e−sx(x+1)dx.
Since the symbol used for the variable of integration has no effect on the value of a definite integral, we can now replace x by the more standard t and write
∫∞2e−st(t−1)dt=e−2s∫∞0e−st(t+1)dt=e−2sL(t+1).
This and Equation 8.4.6 imply that
L(f)=L(2t+1)+e−2sL(t+1).
Now we can use the table of Laplace transforms to find that
L(f)=2s2+1s+e−2s(1s2+1s).
Laplace Transforms of Piecewise Continuous Functions
We’ll now develop the method of Example 8.4.1 into a systematic way to find the Laplace transform of a piecewise continuous function. It is convenient to introduce the unit step function, defined as
U(t)={0,t<01,t≥0.
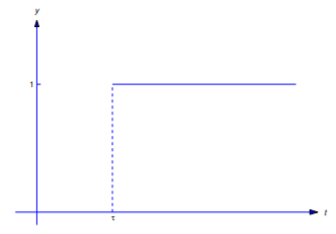
Thus, U(t) “steps” from the constant value 0 to the constant value 1 at t=0. If we replace t by t−τ in Equation ???, then
U(t−τ)={0,t<τ,1,t≥τ;
that is, the step now occurs at t=τ (Figure 8.4.2 ).
The step function enables us to represent piecewise continuous functions conveniently. For example, consider the function
f(t)={f0(t),0≤t<t1,f1(t),t≥t1,
where we assume that f0 and f1 are defined on [0,∞), even though they equal f only on the indicated intervals. This assumption enables us to rewrite Equation ??? as
f(t)=f0(t)+U(t−t1)(f1(t)−f0(t)).
To verify this, note that if t<t1 then U(t−t1)=0 and Equation ??? becomes
f(t)=f0(t)+(0)(f1(t)−f0(t))=f0(t).
If t≥t1 then U(t−t1)=1 and Equation ??? becomes
f(t)=f0(t)+(1)(f1(t)−f0(t))=f1(t).
We need the next theorem to show how Equation ??? can be used to find L(f).
Let g be defined on [0,∞). Suppose τ≥0 and L(g(t+τ)) exists for s>s0. Then L(U(t−τ)g(t)) exists for s>s0, and
L(U(t−τ)g(t))=e−sτL(g(t+τ)).
- Proof
-
By definition,
L(U(t−τ)g(t))=∫∞0e−stU(t−τ)g(t)dt.
From this and the definition of U(t−τ),
L(U(t−τ)g(t))=∫τ0e−st(0)dt+∫∞τe−stg(t)dt.
The first integral on the right equals zero. Introducing the new variable of integration x=t−τ in the second integral yields
L(U(t−τ)g(t))=∫∞0e−s(x+τ)g(x+τ)dx=e−sτ∫∞0e−sxg(x+τ)dx.
Changing the name of the variable of integration in the last integral from x to t yields
L(U(t−τ)g(t))=e−sτ∫∞0e−stg(t+τ)dt=e−sτL(g(t+τ)).
Find L(U(t−1)(t2+1)).
Solution
Here τ=1 and g(t)=t2+1, so
g(t+1)=(t+1)2+1=t2+2t+2.
Since
L(g(t+1))=2s3+2s2+2s,
Theorem 8.4.1 implies that
L(U(t−1)(t2+1))=e−s(2s3+2s2+2s).
Use Theorem 8.4.1 to find the Laplace transform of the function
f(t)={2t+1,0≤t<2,3t,t≥2,
from Example 8.4.1 .
Solution
We first write f in the form Equation ??? as
f(t)=2t+1+U(t−2)(t−1).
Therefore
L(f)=L(2t+1)+L(U(t−2)(t−1))=L(2t+1)+e−2sL(t+1) (from Theorem 8.4.1)=2s2+1s+e−2s(1s2+1s),
which is the result obtained in Example 8.4.1 .
Formula Equation ??? can be extended to more general piecewise continuous functions. For example, we can write
f(t)={f0(t),0≤t<t1,f1(t),t1≤t<t2,f2(t),t≥t2,
as
f(t)=f0(t)+U(t−t1)(f1(t)−f0(t))+U(t−t2)(f2(t)−f1(t))
if f0, f1, and f2 are all defined on [0,∞).
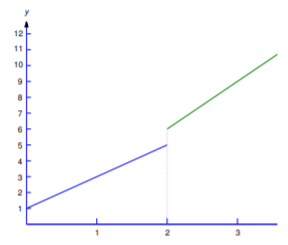
Find the Laplace transform of
f(t)={1,0≤t<2,−2t+1,2≤t<3,3t,3≤t<5,t−1,t≥5
(Figure 8.4.3 ).
Solution
In terms of step functions,
f(t)=1+U(t−2)(−2t+1−1)+U(t−3)(3t+2t−1)=+U(t−5)(t−1−3t),
or
f(t)=1−2U(t−2)t+U(t−3)(5t−1)−U(t−5)(2t+1).
Now Theorem 8.4.1 implies that
L(f)=L(1)−2e−2sL(t+2)+e−3sL(5(t+3)−1)−e−5sL(2(t+5)+1)=L(1)−2e−2sL(t+2)+e−3sL(5t+14)−e−5sL(2t+11)=1s−2e−2s(1s2+2s)+e−3s(5s2+14s)−e−5s(2s2+11s).
The trigonometric identities
sin(A+B)=sinAcosB+cosAsinB
cos(A+B)=cosAcosB−sinAsinB
are useful in problems that involve shifting the arguments of trigonometric functions. We’ll use these identities in the next example.
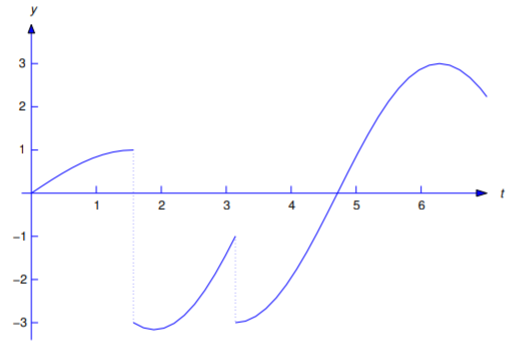
Find the Laplace transform of
f(t)={sint,0≤t<π2cost−3sint,π2≤t<π3cost,t≥π
(Figure 8.4.4 ).
Solution
In terms of step functions,
f(t)=sint+U(t−π/2)(cost−4sint)+U(t−π)(2cost+3sint).
Now Theorem 8.4.1 implies that
L(f)=L(sint)+e−π2sL(cos(t+π2)−4sin(t+π2))+e−πsL(2cos(t+π)+3sin(t+π)).
Since
cos(t+π2)−4sin(t+π2)=−sint−4cost
and
2cos(t+π)+3sin(t+π)=−2cost−3sint,
we see from Equation ??? that
\begin{align*} {\mathscr L}(f)&={\mathscr L}(\sin t)-e^{-\pi s/2}{\mathscr L}(\sin t+4\cos t) -e^{-\pi s}{\mathscr L}(2\cos t+3\sin t)\\[4pt]&={1\over s^2+1}-e^{-{\pi\over 2}s}\left({1+4s\over s^2+1}\right) -e^{-\pi s}\left({3+2s\over s^2+1}\right). \end{align*}\nonumber
The Second Shifting Theorem
Replacing g(t) by g(t-\tau) in Theorem 8.4.1 yields the next theorem.
If \tau\ge0 and {\mathscr L}(g) exists for s>s_0 then {\mathscr L}\left({\mathscr U}(t-\tau)g(t-\tau)\right) exists for s>s_0 and
{\mathscr L}({\mathscr U}(t-\tau)g(t-\tau))=e^{-s\tau}{\mathscr L}(g(t)),\nonumber
or, equivalently,
\label{eq:8.4.12} \mbox{if } g(t)\leftrightarrow G(s),\mbox{ then }{\mathscr U}(t-\tau)g(t-\tau)\leftrightarrow e^{-s\tau}G(s).
Recall that the First Shifting Theorem (Theorem 8.1.3 states that multiplying a function by e^{at} corresponds to shifting the argument of its transform by a units. Theorem 8.4.2 states that multiplying a Laplace transform by the exponential e^{−\tau s} corresponds to shifting the argument of the inverse transform by \tau units.
Use Equation \ref{eq:8.4.12} to find
{\mathscr L}^{-1}\left(e^{-2s}\over s^2\right). \nonumber
Solution
To apply Equation \ref{eq:8.4.12} we let \tau=2 and G(s)=1/s^2. Then g(t)=t and Equation \ref{eq:8.4.12} implies that
{\mathscr L}^{-1}\left(e^{-2s}\over s^2\right)={\mathscr U}(t-2)(t-2).\nonumber
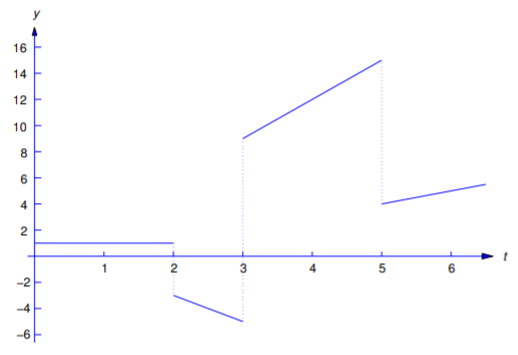
Find the inverse Laplace transform h of
H(s)={1\over s^2}-e^{-s}\left({1\over s^2}+{2\over s}\right)+ e^{-4s}\left({4\over s^3}+{1\over s}\right),\nonumber
and find distinct formulas for h on appropriate intervals.
Solution
Let
G_0(s)={1\over s^2},\quad G_1(s)={1\over s^2}+{2\over s},\quad G_2(s)={4\over s^3}+{1\over s}.\nonumber
Then
g_0(t)=t,\; g_1(t)=t+2,\; g_2(t)=2t^2+1.\nonumber
Hence, Equation \ref{eq:8.4.12} and the linearity of {\mathscr L}^{-1} imply that
\begin{aligned} h(t)&={\mathscr L}^{-1}\left(G_0(s)\right)-{\mathscr L}^{-1}\left(e^{-s}G_1(s)\right)+{\mathscr L}^{-1}\left(e^{-4s}G_2(s)\right)\\[4pt]&=t-{\mathscr U}(t-1)\left[(t-1)+2\right]+{\mathscr U}(t-4)\left[2(t-4)^2+1\right]\\[4pt]&=t-{\mathscr U}(t-1)(t+1)+{\mathscr U}(t-4)(2t^2-16t+33),\end{aligned}\nonumber
which can also be written as
h(t)=\left\{\begin{array}{cl} t,&0\le t<1,\\[4pt]-1,&1\le t<4,\\[4pt]2t^2-16t+32,&t\ge4. \end{array}\right.\nonumber
Find the inverse transform of
H(s)={2s\over s^2+4}-e^{-{\pi\over 2}s} {3s+1\over s^2+9}+e^{-\pi s}{s+1\over s^2+6s+10}. \nonumber
Solution
Let
G_0(s)={2s\over s^2+4},\quad G_1(s)=-{(3s+1)\over s^2+9},\nonumber
and
G_2(s)={s+1\over s^2+6s+10}={(s+3)-2\over (s+3)^2+1}.\nonumber
Then
g_0(t)=2\cos 2t,\quad g_1(t)=-3\cos 3t-{1\over 3}\sin 3t,\nonumber
and
g_2(t)=e^{-3t}(\cos t-2\sin t).\nonumber
Therefore Equation \ref{eq:8.4.12} and the linearity of {\mathscr L}^{-1} imply that
\begin{aligned} h(t)&=2\cos 2t-{\mathscr U}(t-\pi/2)\left[3\cos 3(t-\pi/2)+{1\over 3}\sin 3\left(t-{\pi\over 2}\right)\right]\\[4pt] &= +{\mathscr U}(t-\pi)e^{-3(t-\pi)}\left[\cos (t-\pi)-2\sin (t-\pi)\right].\end{aligned}\nonumber
Using the trigonometric identities Equation \ref{eq:8.4.8} and Equation \ref{eq:8.4.9}, we can rewrite this as
\label{eq:8.4.13} \begin{align} h(t)&=2\cos 2t+{\mathscr U}(t-\pi/2)\left(3\sin 3t- {1\over 3}\cos 3t\right) \\[4pt] &= -{\mathscr U}(t-\pi)e^{-3(t-\pi)} (\cos t-2\sin t) \end{align}
(Figure 8.4.5 ).