
5.3.1: Line Integrals - Part 2


- Last updated
- Dec 18, 2020
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
In this part of the section, we are going to develop a second type of line integral called a vector line integral. Although it's result is also a scalar, it is defined a little differently than the scalar line integral defined earlier in this section. The previous definition is repeated below for easy reference.
DEFINITION: Scalar Line Integral
Let f be a function with a domain that includes the smooth curve C that is parameterized by ⇀r(t)=⟨x(t),y(t),z(t)⟩, a≤t≤b. The scalar line integral of f along C is
∫Cf(x,y,z)ds=limn→∞n∑i=1f(P∗i)Δsi
if this limit exists t∗i and Δsi are defined as in the previous paragraphs). If C is a planar curve, then C can be represented by the parametric equations x=x(t), y=y(t), and a≤t≤b. If C is smooth and f(x,y) is a function of two variables, then the scalar line integral of f along C is defined similarly as
∫Cf(x,y)ds=limn→∞n∑i=1f(P∗i)Δsi,
if this limit exists.
Vector Line Integrals
The second type of line integrals are vector line integrals, in which we integrate along a curve through a vector field. For example, let
⇀F(x,y,z)=P(x,y,z)ˆi+Q(x,y,z)ˆj+R(x,y,z)ˆk
be a continuous vector field in ℝ3 that represents a force on a particle, and let C be a smooth curve in ℝ3 contained in the domain of ⇀F. How would we compute the work done by ⇀F in moving a particle along C?
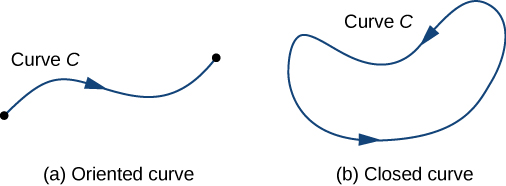
To answer this question, first note that a particle could travel in two directions along a curve: a forward direction and a backward direction. The work done by the vector field depends on the direction in which the particle is moving. Therefore, we must specify a direction along curve C; such a specified direction is called an orientation of a curve. The specified direction is the positive direction along C; the opposite direction is the negative direction along C. When C has been given an orientation, C is called an oriented curve (Figure 5.3.1.5). The work done on the particle depends on the direction along the curve in which the particle is moving.
A closed curve is one for which there exists a parameterization ⇀r(t), a≤t≤b, such that ⇀r(a)=⇀r(b), and the curve is traversed exactly once. In other words, the parameterization is one-to-one on the domain (a,b).
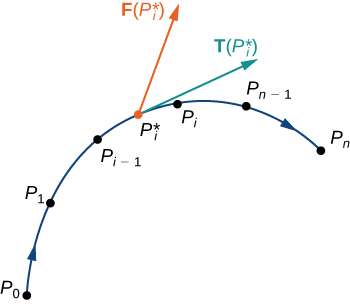
Let ⇀r(t) be a parameterization of C for a≤t≤b such that the curve is traversed exactly once by the particle and the particle moves in the positive direction along C. Divide the parameter interval [a,b] into n subintervals [ti−1,ti], 0≤i≤n, of equal width. Denote the endpoints of r(t0), r(t1),…, r(tn) by P0,…,Pn. Points Pi divide C into n pieces. Denote the length of the piece from Pi−1 to Pi by Δsi. For each i, choose a value t∗i in the subinterval [ti−1,ti]. Then, the endpoint of ⇀r(t∗i) is a point in the piece of C between Pi−1 and Pi (Figure 5.3.1.6). If Δsi is small, then as the particle moves from Pi−1 to Pi along C, it moves approximately in the direction of ⇀T(Pi), the unit tangent vector at the endpoint of ⇀r(t∗i). Let P∗i denote the endpoint of ⇀r(t∗i). Then, the work done by the force vector field in moving the particle from Pi−1 to Pi is ⇀F(P∗i)·(Δsi⇀T(P∗i)), so the total work done along C is
n∑i=1⇀F(P∗i)·(Δsi⇀T(P∗i))=n∑i=1⇀F(P∗i)·⇀T(P∗i)Δsi.
Letting the arc length of the pieces of C get arbitrarily small by taking a limit as n→∞ gives us the work done by the field in moving the particle along C. Therefore, the work done by ⇀F in moving the particle in the positive direction along C is defined as
W=∫C⇀F⋅⇀Tds,
which gives us the concept of a vector line integral.
The vector line integral of vector field ⇀F along oriented smooth curve C is
∫C⇀F⋅⇀Tds=limn→∞n∑i=1⇀F(P∗i)⋅⇀T(P∗i)Δsi
if that limit exists.
With scalar line integrals, neither the orientation nor the parameterization of the curve matters. As long as the curve is traversed exactly once by the parameterization, the value of the line integral is unchanged. With vector line integrals, the orientation of the curve does matter. If we think of the line integral as computing work, then this makes sense: if you hike up a mountain, then the gravitational force of Earth does negative work on you. If you walk down the mountain by the exact same path, then Earth’s gravitational force does positive work on you. In other words, reversing the path changes the work value from negative to positive in this case. Note that if C is an oriented curve, then we let −C represent the same curve but with opposite orientation.
As with scalar line integrals, it is easier to compute a vector line integral if we express it in terms of the parameterization function ⇀r and the variable t. To translate the integral ∫C⇀F⋅⇀Tds in terms of t, note that unit tangent vector ⇀T along C is given by \vecs{T}=\dfrac{\vecs{r}′(t)}{‖\vecs{r}′(t)‖} (assuming ‖\vecs{r}′(t)‖≠0). Since ds=‖\vecs r′(t)‖\,dt, as we saw when discussing scalar line integrals, we have
\vecs F·\vecs T\,ds=\vecs F(\vecs r(t))·\dfrac{\vecs r′(t)}{‖\vecs r′(t)‖}‖\vecs r′(t)‖dt=\vecs F(\vecs r(t))·\vecs r′(t)\,dt. \nonumber
Thus, we have the following formula for computing vector line integrals:
\int_C\vecs F·\vecs T\,ds=\int_a^b \vecs F(\vecs r(t))·\vecs r′(t)\,dt.\label{lineintformula}
Because of Equation \ref{lineintformula}, we often use the notation \displaystyle \int_C \vecs{F} \cdot d\vecs{r} for the line integral \displaystyle \int_C \vecs F·\vecs T\,ds.
If \vecs r(t)=⟨x(t),y(t),z(t)⟩, then \dfrac{d\vecs{r}}{dt} denotes vector ⟨x′(t),y′(t),z′(t)⟩, and d\vecs{r} = \vecs r'(t)\,dt.
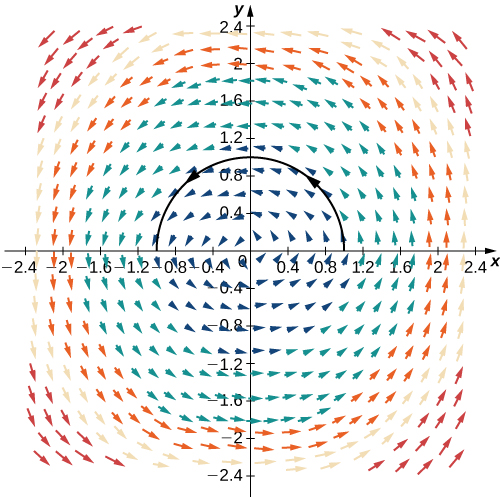
Find the value of integral \displaystyle \int_C \vecs{F} \cdot d\vecs{r}, where C is the semicircle parameterized by \vecs{r}(t)=⟨\cos t,\sin t⟩, 0≤t≤\pi and \vecs F=⟨−y,x⟩.
Solution
We can use Equation \ref{lineintformula} to convert the variable of integration from s to t. We then have
\vecs F(\vecs r(t))=⟨−\sin t,\cos t⟩ \; \text{and} \; \vecs r′(t)=⟨−\sin t,\cos t⟩ . \nonumber
Therefore,
\begin{align*} \int_C \vecs{F} \cdot d\vecs{r} &=\int_0^{\pi}⟨−\sin t,\cos t⟩·⟨−\sin t,\cos t⟩ \,dt \\[4pt] &=\int_0^{\pi} {\sin}^2 t+{\cos}^2 t \,dt \\[4pt] &=\int_0^{\pi}1 \,dt=\pi.\end{align*}
See Figure \PageIndex{7}.
Find the value of integral \displaystyle \int_C \vecs{F} \cdot d\vecs{r}, where C is the semicircle parameterized by \vecs r(t)=⟨\cos (t+π),\sin t⟩, 0≤t≤\pi and \vecs F=⟨−y,x⟩.
Solution
Notice that this is the same problem as Example \PageIndex{5}, except the orientation of the curve has been traversed. In this example, the parameterization starts at \vecs r(0)=⟨-1,0⟩ and ends at \vecs r(\pi)=⟨1,0⟩. By Equation \ref{lineintformula},
\begin{align*} \int_C \vecs{F} \cdot d\vecs{r} &=\int_0^{\pi} ⟨−\sin t,\cos (t+\pi)⟩·⟨−\sin (t+\pi), \cos t⟩dt\\[4pt] &=\int_0^{\pi}⟨−\sin t,−\cos t⟩·⟨\sin t,\cos t⟩dt\\[4pt] &=\int_{0}^{π}(−{\sin}^2 t−{\cos}^2 t)dt \\[4pt] &=\int_{0}^{\pi}−1dt\\[4pt] &=−\pi. \end{align*}
Notice that this is the negative of the answer in Example \PageIndex{5}. It makes sense that this answer is negative because the orientation of the curve goes against the “flow” of the vector field.
Let C be an oriented curve and let -C denote the same curve but with the orientation reversed. Then, the previous two examples illustrate the following fact:
\int_{-C} \vecs{F} \cdot d\vecs{r}=−\int_C\vecs{F} \cdot d\vecs{r}. \nonumber
That is, reversing the orientation of a curve changes the sign of a line integral.
Let \vecs F=x\,\hat{\mathbf i}+y \,\hat{\mathbf j} be a vector field and let C be the curve with parameterization ⟨t,t^2⟩ for 0≤t≤2. Which is greater: \displaystyle \int_C\vecs F·\vecs T\,ds or \displaystyle \int_{−C} \vecs F·\vecs T\,ds?
- Hint
-
Imagine moving along the path and computing the dot product \vecs F·\vecs T as you go.
- Answer
-
\int_C \vecs F·\vecs T \,ds \nonumber
Another standard notation for integral \displaystyle \int_C \vecs{F} \cdot d\vecs{r} is \displaystyle \int_C P\,dx+Q\,dy+R \,dz. In this notation, P,\, Q, and R are functions, and we think of d\vecs{r} as vector ⟨dx,dy,dz⟩. To justify this convention, recall that d\vecs{r}=\vecs T\,ds=\vecs r′(t) \,dt=\left\langle\dfrac{dx}{dt},\dfrac{dy}{dt},\dfrac{dz}{dt}\right\rangle\,dt. Therefore,
\vecs{F} \cdot d\vecs{r}=⟨P,Q,R⟩·⟨dx,dy,dz⟩=P\,dx+Q\,dy+R\,dz. \nonumber
If d\vecs{r}=⟨dx,dy,dz⟩, then \dfrac{dr}{dt}=\left\langle\dfrac{dx}{dt},\dfrac{dy}{dt},\dfrac{dz}{dt}\right\rangle, which implies that d\vecs{r}=\left\langle\dfrac{dx}{dt},\dfrac{dy}{dt},\dfrac{dz}{dt}\right\rangle\,dt. Therefore
\begin{align} \int_C \vecs{F} \cdot d\vecs{r} &=\int_C P\,dx+Q\,dy+R\,dz \\[4pt] &=\int_a^b\left(P\big(\vecs r(t)\big)\dfrac{dx}{dt}+Q\big(\vecs r(t)\big)\dfrac{dy}{dt}+R\big(\vecs r(t)\big)\dfrac{dz}{dt}\right)\,dt. \label{eq14}\end{align}
Find the value of integral \displaystyle \int_C z\,dx+x\,dy+y\,dz, where C is the curve parameterized by \vecs r(t)=⟨t^2,\sqrt{t},t⟩, 1≤t≤4.
Solution
As with our previous examples, to compute this line integral we should perform a change of variables to write everything in terms of t. In this case, Equation \ref{eq14} allows us to make this change:
\begin{align*} \int_C z\,dx+x\,dy+y\,dz &=\int_1^4 \left(t(2t)+t^2\left(\frac{1}{2\sqrt{t}}\right)+\sqrt{t}\right)\,dt \\[4pt] &=\int_1^4\left(2t^2+\frac{t^{3/2}}{2}+\sqrt{t}\right)\,dt \\[4pt] &={\left[\dfrac{2t^3}{3}+\dfrac{t^{5/2}}{5}+\dfrac{2t^{3/2}}{3} \right]}_{t=1}^{t=4} \\[4pt] &=\dfrac{793}{15}.\end{align*}
Find the value of \displaystyle \int_C 4x\,dx+z\,dy+4y^2\,dz, where C is the curve parameterized by \vecs r(t)=⟨4\cos(2t),2\sin(2t),3⟩, 0≤t≤\dfrac{\pi}{4}.
- Hint
-
Write the integral in terms of t using Equation \ref{eq14}.
- Answer
-
−26
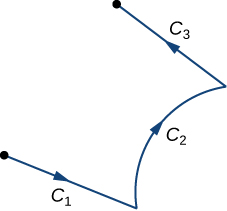
We have learned how to integrate smooth oriented curves. Now, suppose that C is an oriented curve that is not smooth, but can be written as the union of finitely many smooth curves. In this case, we say that C is a piecewise smooth curve. To be precise, curve C is piecewise smooth if C can be written as a union of n smooth curves C_1, C_2,…, C_n such that the endpoint of C_i is the starting point of C_{i+1} (Figure \PageIndex{8}). When curves C_i satisfy the condition that the endpoint of C_i is the starting point of C_{i+1}, we write their union as C_1+C_2+⋯+C_n.
The next theorem summarizes several key properties of vector line integrals.
Let \vecs F and \vecs G be continuous vector fields with domains that include the oriented smooth curve C. Then
- \displaystyle \int_C(\vecs F+\vecs G)·d\vecs{r}=\int_C \vecs{F} \cdot d\vecs{r}+\int_C \vecs G·d\vecs{r}
- \displaystyle \int_C k\vecs{F} \cdot d\vecs{r}=k\int_C \vecs{F} \cdot d\vecs{r}, where k is a constant
- \displaystyle \int_{-C} \vecs{F} \cdot d\vecs{r}=-\int_{C}\vecs{F} \cdot d\vecs{r}
- Suppose instead that C is a piecewise smooth curve in the domains of \vecs F and \vecs G, where C=C_1+C_2+⋯+C_n and C_1,C_2,…,C_n are smooth curves such that the endpoint of C_i is the starting point of C_{i+1}. Then
\int_C \vecs F·d\vecs{r}=\int_{C_1} \vecs F·d\vecs{r}+\int_{C_2} \vecs F·d\vecs{r}+⋯+\int_{C_n} \vecs F·d\vecs{r}. \nonumber
Notice the similarities between these items and the properties of single-variable integrals. Properties i. and ii. say that line integrals are linear, which is true of single-variable integrals as well. Property iii. says that reversing the orientation of a curve changes the sign of the integral. If we think of the integral as computing the work done on a particle traveling along C, then this makes sense. If the particle moves backward rather than forward, then the value of the work done has the opposite sign. This is analogous to the equation \displaystyle \int_a^b f(x)\,dx=−\int_b^af(x)\,dx. Finally, if [a_1,a_2], [a_2,a_3],…, [a_{n−1},a_n] are intervals, then
\int_{a_1}^{a_n}f(x) \,dx=\int_{a_1}^{a_2}f(x)\,dx+\int_{a_1}^{a_3}f(x)\,dx+⋯+\int_{a_{n−1}}^{a_n} f(x)\,dx, \nonumber
which is analogous to property iv.
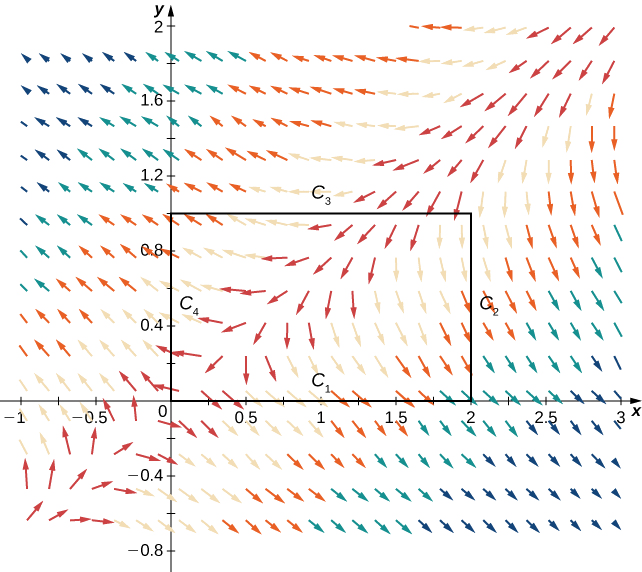
Find the value of integral \displaystyle \int_C \vecs F·\vecs T \,ds, where C is the rectangle (oriented counterclockwise) in a plane with vertices (0,0), (2,0), (2,1), and (0,1), and where \vecs F=⟨x−2y,y−x⟩ (Figure \PageIndex{9}).
Solution
Note that curve C is the union of its four sides, and each side is smooth. Therefore C is piecewise smooth. Let C_1 represent the side from (0,0) to (2,0), let C_2 represent the side from (2,0) to (2,1), let C_3 represent the side from (2,1) to (0,1), and let C_4 represent the side from (0,1) to (0,0) (Figure \PageIndex{9}). Then,
\int_C \vecs F·\vecs T \,dr=\int_{C_1} \vecs F·\vecs T \,dr+\int_{C_2} \vecs F·\vecs T \,dr+\int_{C_3} \vecs F·\vecs T \,dr+\int_{C_4} \vecs F·\vecs T \,dr. \nonumber
We want to compute each of the four integrals on the right-hand side using Equation \ref{eq12a}. Before doing this, we need a parameterization of each side of the rectangle. Here are four parameterizations (note that they traverse C counterclockwise):
\begin{align*} C_1&: ⟨t,0⟩,0≤t≤2\\[4pt] C_2&: ⟨2,t⟩, 0≤t≤1 \\[4pt] C_3&: ⟨2−t,1⟩, 0≤t≤2\\[4pt] C_4&: ⟨0,1−t⟩, 0≤t≤1. \end{align*}
Therefore,
\begin{align*} \int_{C_1} \vecs F·\vecs T \,dr &=\int_0^2 \vecs F(\vecs r(t))·\vecs r′(t) \,dt \\[4pt] &=\int_0^2 ⟨t−2(0),0−t⟩·⟨1,0⟩ \,dt=\int_0^2 t \,dt \\[4pt] &=\Big[\tfrac{t^2}{2}\Big]_0^2=2. \end{align*}
Notice that the value of this integral is positive, which should not be surprising. As we move along curve C_1 from left to right, our movement flows in the general direction of the vector field itself. At any point along C_1, the tangent vector to the curve and the corresponding vector in the field form an angle that is less than 90°. Therefore, the tangent vector and the force vector have a positive dot product all along C_1, and the line integral will have positive value.
The calculations for the three other line integrals are done similarly:
\begin{align*} \int_{C_2} \vecs{F} \cdot d\vecs{r} &=\int_{0}^{1}⟨2−2t,t−2⟩·⟨0,1⟩ \,dt \\[4pt] &=\int_{0}^{1} (t−2) \,dt \\[4pt] &=\Big[\tfrac{t^2}{2}−2t\Big]_0^1=−\dfrac{3}{2}, \end{align*}
\begin{align*} \int_{C_3} \vecs F·\vecs T \,ds &=\int_0^2⟨(2−t)−2,1−(2−t)⟩·⟨−1,0⟩ \,dt \\[4pt] &=\int_0^2t \,dt=2, \end{align*}
and
\begin{align*} \int_{C_4} \vecs{F} \cdot d\vecs{r} &=\int_0^1⟨−2(1−t),1−t⟩·⟨0,−1⟩ \,dt \\[4pt] &=\int_0^1(t−1) \,dt \\[4pt] &=\Big[\tfrac{t^2}{2}−t\Big]_0^1=−\dfrac{1}{2}. \end{align*}
Thus, we have \displaystyle \int_C \vecs{F} \cdot d\vecs{r}=2.
Calculate line integral \displaystyle \int_C \vecs{F} \cdot d\vecs{r}, where \vecs F is vector field ⟨y^2,2xy+1⟩ and C is a triangle with vertices (0,0), (4,0), and (0,5), oriented counterclockwise.
- Hint
-
Write the triangle as a union of its three sides, then calculate three separate line integrals.
- Answer
-
0
Applications of Line Integrals
Scalar line integrals have many applications. They can be used to calculate the length or mass of a wire, the surface area of a sheet of a given height, or the electric potential of a charged wire given a linear charge density. Vector line integrals are extremely useful in physics. They can be used to calculate the work done on a particle as it moves through a force field, or the flow rate of a fluid across a curve. Here, we calculate the mass of a wire using a scalar line integral and the work done by a force using a vector line integral.
Suppose that a piece of wire is modeled by curve C in space. The mass per unit length (the linear density) of the wire is a continuous function \rho(x,y,z). We can calculate the total mass of the wire using the scalar line integral \displaystyle \int_C \rho(x,y,z) \,ds. The reason is that mass is density multiplied by length, and therefore the density of a small piece of the wire can be approximated by \rho(x^*,y^*,z^*) \,\Delta s for some point (x^*,y^*,z^*) in the piece. Letting the length of the pieces shrink to zero with a limit yields the line integral \displaystyle \int_C \rho(x,y,z) \,ds.
Calculate the mass of a spring in the shape of a curve parameterized by ⟨t,2\cos t,2\sin t⟩, 0≤t≤\dfrac{\pi}{2}, with a density function given by \rho(x,y,z)=e^x+yz kg/m (Figure \PageIndex{10}).
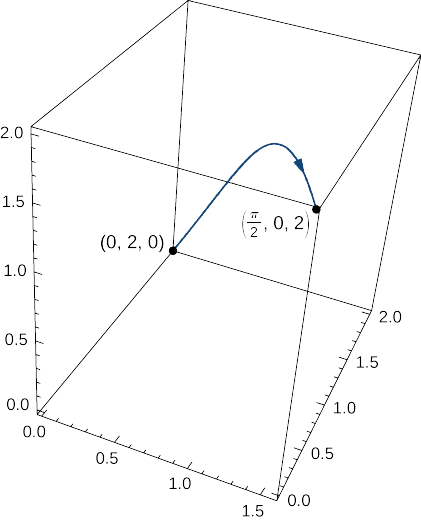
Solution
To calculate the mass of the spring, we must find the value of the scalar line integral \displaystyle \int_C(e^x+yz)\,ds, where C is the given helix. To calculate this integral, we write it in terms of t using Equation \ref{eq12a}:
\begin{align*} \int_C \left(e^x+yz\right) \,ds &=\int_0^{\tfrac{\pi}{2}} \left((e^t+4\cos t\sin t)\sqrt{1+(−2\cos t)^2+(2\sin t)^2}\right)\,dt\\[4pt] &=\int_0^{\tfrac{\pi}{2}}\left((e^t+4\cos t\sin t)\sqrt{5}\right) \,dt \\[4pt] &=\sqrt{5}\Big[e^t+2\sin^2 t\Big]_{t=0}^{t=\pi/2}\\[4pt] &=\sqrt{5}(e^{\pi/2}+1). \end{align*}
Therefore, the mass is \sqrt{5}(e^{\pi/2}+1) kg.
Calculate the mass of a spring in the shape of a helix parameterized by \vecs r(t)=⟨\cos t,\sin t,t⟩, 0≤t≤6\pi, with a density function given by \rho (x,y,z)=x+y+z kg/m.
- Hint
-
Calculate the line integral of \rho over the curve with parameterization \vecs r.
- Answer
-
18\sqrt{2}{\pi}^2 kg
When we first defined vector line integrals, we used the concept of work to motivate the definition. Therefore, it is not surprising that calculating the work done by a vector field representing a force is a standard use of vector line integrals. Recall that if an object moves along curve C in force field \vecs F, then the work required to move the object is given by \displaystyle \int_C \vecs{F} \cdot d\vecs{r}.
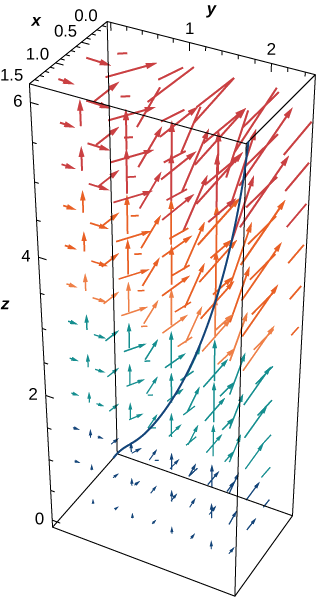
How much work is required to move an object in vector force field \vecs F=⟨yz,xy,xz⟩ along path \vecs r(t)=⟨t^2,t,t^4⟩,\, 0≤t≤1? See Figure \PageIndex{11}.
Solution
Let C denote the given path. We need to find the value of \displaystyle \int_C \vecs{F} \cdot d\vecs{r}. To do this, we use Equation \ref{lineintformula} :
\begin{align*}\int_C \vecs{F} \cdot d\vecs{r} &=\int_0^1(⟨t^5,t^3,t^6⟩·⟨2t,1,4t^3⟩) \,dt \\[4pt] &=\int_0^1(2t^6+t^3+4t^9) \,dt \\[4pt] &={\Big[\dfrac{2t^7}{7}+\dfrac{t^4}{4}+\dfrac{2t^{10}}{5}\Big]}_{t=0}^{t=1}=\dfrac{131}{140}\;\text{units of work}. \end{align*}
Flux
We close this section by discussing two key concepts related to line integrals: flux across a plane curve and circulation along a plane curve. Flux is used in applications to calculate fluid flow across a curve, and the concept of circulation is important for characterizing conservative gradient fields in terms of line integrals. Both these concepts are used heavily throughout the rest of this chapter. The idea of flux is especially important for Green’s theorem, and in higher dimensions for Stokes’ theorem and the divergence theorem.
Let C be a plane curve and let \vecs F be a vector field in the plane. Imagine C is a membrane across which fluid flows, but C does not impede the flow of the fluid. In other words, C is an idealized membrane invisible to the fluid. Suppose \vecs F represents the velocity field of the fluid. How could we quantify the rate at which the fluid is crossing C?
Recall that the line integral of \vecs F along C is \displaystyle \int_C \vecs F·\vecs T \,ds—in other words, the line integral is the dot product of the vector field with the unit tangential vector with respect to arc length. If we replace the unit tangential vector with unit normal vector \vecs N(t) and instead compute integral \int_C \vecs F·\vecs N \,ds, we determine the flux across C. To be precise, the definition of integral \displaystyle \int_C \vecs F·\vecs N \,ds is the same as integral \displaystyle \int_C \vecs F·\vecs T \,ds, except the \vecs T in the Riemann sum is replaced with \vecs N. Therefore, the flux across C is defined as
\int_C \vecs F·\vecs N \,ds=\lim_{n\to\infty}\sum_{i=1}^{n} \vecs F(P_i^*)·\vecs N(P_i^*)\,\Delta s_i, \nonumber
where P_i^* and \Delta s_i are defined as they were for integral \displaystyle \int_C \vecs F·\vecs T \,ds. Therefore, a flux integral is an integral that is perpendicular to a vector line integral, because \vecs N and \vecs T are perpendicular vectors.
If \vecs F is a velocity field of a fluid and C is a curve that represents a membrane, then the flux of \vecs F across C is the quantity of fluid flowing across C per unit time, or the rate of flow.
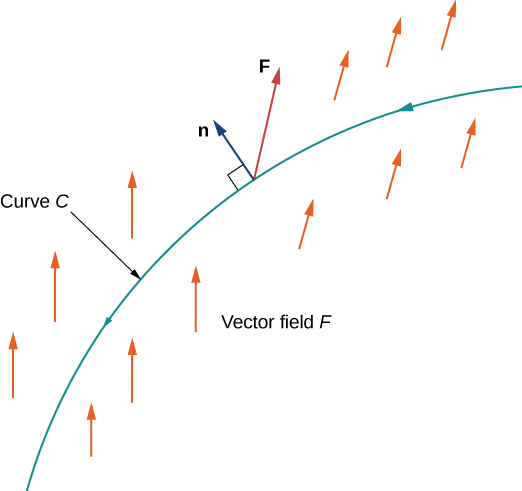
More formally, let C be a plane curve parameterized by \vecs r(t)=⟨x(t),\,y(t)⟩, a≤t≤b. Let \vecs n(t)=⟨y′(t),\,−x′(t)⟩ be the vector that is normal to C at the endpoint of \vecs r(t) and points to the right as we traverse C in the positive direction (Figure \PageIndex{12}). Then, \vecs N(t)=\dfrac{\vecs n(t)}{‖\vecs n(t)‖} is the unit normal vector to C at the endpoint of \vecs r(t) that points to the right as we traverse C.
The flux of \vecs F across C is line integral
\int_C \vecs F·\dfrac{\vecs n(t)}{‖\vecs n(t)‖} \,ds. \nonumber
We now give a formula for calculating the flux across a curve. This formula is analogous to the formula used to calculate a vector line integral (see Equation \ref{lineintformula}).
Let \vecs F be a vector field and let C be a smooth curve with parameterization r(t)=⟨x(t),y(t)⟩, a≤t≤b.Let \vecs n(t)=⟨y′(t),−x′(t)⟩. The flux of \vecs F across C is
\int_C \vecs F·\vecs N\,ds=\int_a^b\vecs F(\vecs r(t))·\vecs n(t) \,dt. \label{eq84}
Before deriving the formula, note that
‖\vecs n(t)‖=‖⟨y′(t),−x′(t)⟩‖=\sqrt{{(y′(t))}^2+{(x′(t))}^2}=‖\vecs r′(t)‖. \nonumber
Therefore,
\begin{align*}\int_C \vecs F·\vecs N \,ds &=\int_C \vecs F·\dfrac{\vecs n(t)}{‖\vecs n(t)‖} \,ds \\[4pt] &=\int_a^b \vecs F·\dfrac{\vecs n(t)}{‖\vecs n(t)‖}‖\vecs r′(t)‖ \,dt \\[4pt] &=\int_a^b \vecs F(\vecs r(t))·\vecs n(t) \,dt. \end{align*}
\square
Calculate the flux of \vecs F=⟨2x,2y⟩ across a unit circle oriented counterclockwise (Figure \PageIndex{13}).

Solution
To compute the flux, we first need a parameterization of the unit circle. We can use the standard parameterization \vecs r(t)=⟨\cos t,\sin t⟩, 0≤t≤2\pi. The normal vector to a unit circle is ⟨\cos t,\sin t⟩. Therefore, the flux is
\begin{align*} \int_C \vecs F·\vecs N \,ds &=\int_0^{2\pi}⟨2\cos t,2\sin t⟩·⟨\cos t,\sin t⟩ \,dt\\[4pt] &=\int_0^{2\pi}(2{\cos}^2t+2{\sin}^2t) \,dt \\[4pt] &=2\int_0^{2\pi}({\cos}^2t+{\sin}^2t) \,dt \\[4pt] &=2\int_0^{2\pi} \,dt=4\pi.\end{align*}
Calculate the flux of \vecs F=⟨x+y,2y⟩ across the line segment from (0,0) to (2,3), where the curve is oriented from left to right.
- Hint
-
Use Equation \ref{eq84}.
- Answer
-
3/2
Let \vecs F(x,y)=⟨P(x,y),Q(x,y)⟩ be a two-dimensional vector field. Recall that integral \displaystyle \int_C \vecs F·\vecs T \,ds is sometimes written as \displaystyle \int_C P\,dx+Q\,dy. Analogously, flux \displaystyle \int_C \vecs F·\vecs N \,ds is sometimes written in the notation \displaystyle \int_C −Q\,dx+P\,dy, because the unit normal vector \vecs N is perpendicular to the unit tangent \vecs T. Rotating the vector d\vecs{r}=⟨dx,dy⟩ by 90° results in vector ⟨dy,−dx⟩. Therefore, the line integral in Example \PageIndex{8} can be written as \displaystyle \int_C −2y\,dx+2x\,dy.