
3.11: Linearization and Differentials




- Last updated
- Apr 27, 2019
- Save as PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
- Describe the linear approximation to a function at a point.
- Write the linearization of a given function.
- Draw a graph that illustrates the use of differentials to approximate the change in a quantity.
- Calculate the relative error and percentage error in using a differential approximation.
We have just seen how derivatives allow us to compare related quantities that are changing over time. In this section, we examine another application of derivatives: the ability to approximate functions locally by linear functions. Linear functions are the easiest functions with which to work, so they provide a useful tool for approximating function values. In addition, the ideas presented in this section are generalized later in the text when we study how to approximate functions by higher-degree polynomials Introduction to Power Series and Functions.
Linear Approximation of a Function at a Point
Consider a function f that is differentiable at a point x=a. Recall that the tangent line to the graph of f at a is given by the equation
y=f(a)+f′(a)(x−a).
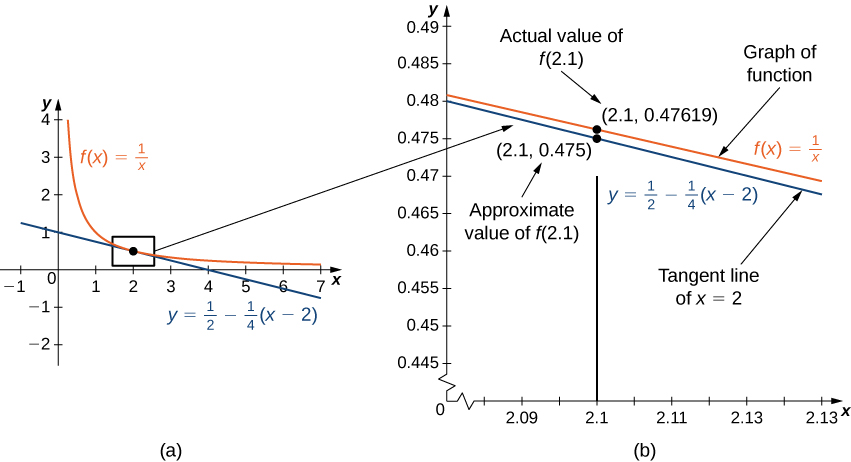
For example, consider the function f(x)=1x at a=2. Since f is differentiable at x=2 and f′(x)=−1x2, we see that f′(2)=−14. Therefore, the tangent line to the graph of f at a=2 is given by the equation
y=12−14(x−2).
Figure 3.11.1a shows a graph of f(x)=1x along with the tangent line to f at x=2. Note that for x near 2, the graph of the tangent line is close to the graph of f. As a result, we can use the equation of the tangent line to approximate f(x) for x near 2. For example, if x=2.1, the y value of the corresponding point on the tangent line is
y=12−14(2.1−2)=0.475.
The actual value of f(2.1) is given by
f(2.1)=12.1≈0.47619.
Therefore, the tangent line gives us a fairly good approximation of f(2.1) (Figure 3.11.1b). However, note that for values of x far from 2, the equation of the tangent line does not give us a good approximation. For example, if x=10, the y-value of the corresponding point on the tangent line is
y=12−14(10−2)=12−2=−1.5,
whereas the value of the function at x=10 is f(10)=0.1.
In general, for a differentiable function f, the equation of the tangent line to f at x=a can be used to approximate f(x) for x near a. Therefore, we can write
f(x)≈f(a)+f′(a)(x−a) for x near a.
We call the linear function
L(x)=f(a)+f′(a)(x−a)
the linear approximation, or tangent line approximation, of f at x=a. This function L is also known as the linearization of f at x=a.
To show how useful the linear approximation can be, we look at how to find the linear approximation for f(x)=√x at x=9.
Find the linear approximation of f(x)=√x at x=9 and use the approximation to estimate √9.1.
Solution
Since we are looking for the linear approximation at x=9, using Equation ??? we know the linear approximation is given by
L(x)=f(9)+f′(9)(x−9).
We need to find f(9) and f′(9).
f(x)=√x⇒f(9)=√9=3
f′(x)=12√x⇒f′(9)=12√9=16
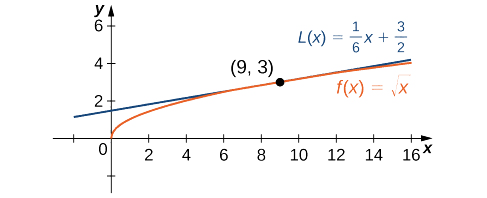
Therefore, the linear approximation is given by Figure 3.11.2.
L(x)=3+16(x−9)
Using the linear approximation, we can estimate √9.1 by writing
√9.1=f(9.1)≈L(9.1)=3+16(9.1−9)≈3.0167.
Analysis
Using a calculator, the value of √9.1 to four decimal places is 3.0166. The value given by the linear approximation, 3.0167, is very close to the value obtained with a calculator, so it appears that using this linear approximation is a good way to estimate √x, at least for x near 9. At the same time, it may seem odd to use a linear approximation when we can just push a few buttons on a calculator to evaluate √9.1. However, how does the calculator evaluate √9.1? The calculator uses an approximation! In fact, calculators and computers use approximations all the time to evaluate mathematical expressions; they just use higher-degree approximations.
Find the local linear approximation to f(x)=3√x at x=8. Use it to approximate 3√8.1 to five decimal places.
- Hint
-
L(x)=f(a)+f′(a)(x−a)
- Answer
-
L(x)=2+112(x−8); 2.00833
Find the linear approximation of f(x)=sinx at x=π3 and use it to approximate \sin(62°).
Solution
First we note that since \frac{π}{3} rad is equivalent to 60°, using the linear approximation at x=π/3 seems reasonable. The linear approximation is given by
L(x)=f(\frac{π}{3})+f'(\frac{π}{3})(x−\frac{π}{3}).
We see that
f(x)=\sin x ⇒f(\frac{π}{3})=\sin(\frac{π}{3})=\frac{\sqrt{3}}{2}
f'(x)=\cos x ⇒f'(\frac{π}{3})=\cos(\frac{π}{3})=\frac{1}{2}
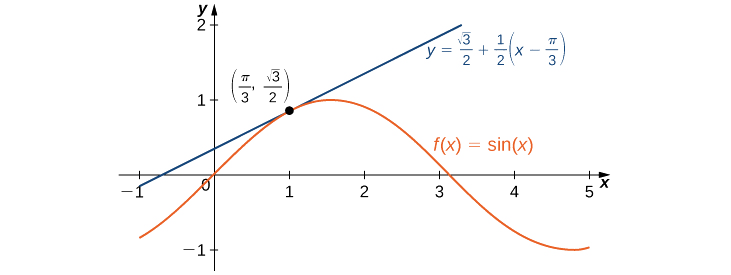
Therefore, the linear approximation of f at x=π/3 is given by Figure \PageIndex{3}.
L(x)=\frac{\sqrt{3}}{2}+\frac{1}{2}(x−\frac{π}{3})
To estimate \sin(62°) using L, we must first convert 62° to radians. We have 62°=\frac{62π}{180} radians, so the estimate for \sin(62°) is given by
\sin(62°)=f(\frac{62π}{180})≈L(\frac{62π}{180})=\frac{\sqrt{3}}{2}+\frac{1}{2}(\frac{62π}{180}−\frac{π}{3})=\frac{\sqrt{3}}{2}+\frac{1}{2}(\frac{2π}{180})=\frac{\sqrt{3}}{2}+\frac{π}{180}≈0.88348.
Find the linear approximation for f(x)=\cos x at x=\frac{π}{2}.
- Hint
-
L(x)=f(a)+f'(a)(x−a)
- Answer
-
L(x)=−x+\frac{π}{2}
Linear approximations may be used in estimating roots and powers. In the next example, we find the linear approximation for f(x)=(1+x)^n at x=0, which can be used to estimate roots and powers for real numbers near 1. The same idea can be extended to a function of the form f(x)=(m+x)^n to estimate roots and powers near a different number m.
Find the linear approximation of f(x)=(1+x)^n at x=0. Use this approximation to estimate (1.01)^3.
Solution
The linear approximation at x=0 is given by
L(x)=f(0)+f'(0)(x−0).
Because
f(x)=(1+x)^n⇒f(0)=1
f'(x)=n(1+x)^{n−1}⇒f'(0)=n,
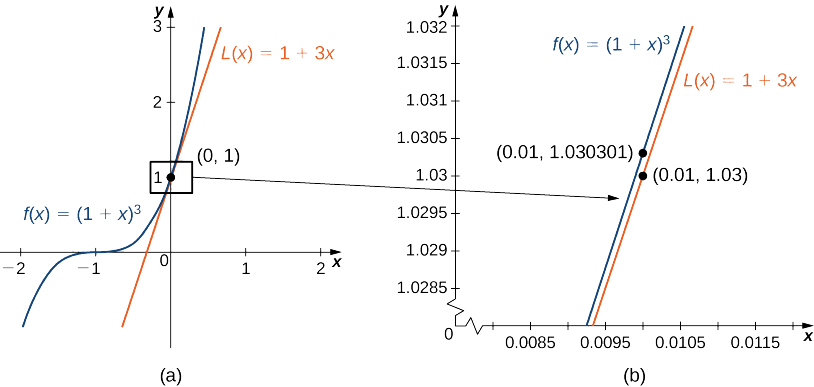
the linear approximation is given by Figure \PageIndex{4a}.
L(x)=1+n(x−0)=1+nx
We can approximate (1.01)^3 by evaluating L(0.01) when n=3. We conclude that
(1.01)^3=f(1.01)≈L(1.01)=1+3(0.01)=1.03.
Find the linear approximation of f(x)=(1+x)^4 at x=0 without using the result from the preceding example.
- Hint
-
f'(x)=4(1+x)^3
- Answer
-
L(x)=1+4x
Differentials
We have seen that linear approximations can be used to estimate function values. They can also be used to estimate the amount a function value changes as a result of a small change in the input. To discuss this more formally, we define a related concept: differentials. Differentials provide us with a way of estimating the amount a function changes as a result of a small change in input values.
When we first looked at derivatives, we used the Leibniz notation dy/dx to represent the derivative of y with respect to x. Although we used the expressions dy and dx in this notation, they did not have meaning on their own. Here we see a meaning to the expressions dy and dx. Suppose y=f(x) is a differentiable function. Let dx be an independent variable that can be assigned any nonzero real number, and define the dependent variable dy by
dy=f'(x)\,dx. \label{diffeq}
It is important to notice that dy is a function of both x and dx. The expressions dy and dx are called differentials. We can divide both sides of Equation \ref{diffeq} by dx, which yields
\frac{dy}{dx}=f'(x). \label{inteq}
This is the familiar expression we have used to denote a derivative. Equation \ref{inteq} is known as the differential form of Equation \ref{diffeq}.
For each of the following functions, find dy and evaluate when x=3 and dx=0.1.
- y=x^2+2x
- y=\cos x
Solution
The key step is calculating the derivative. When we have that, we can obtain dy directly.
a. Since f(x)=x^2+2x, we know f'(x)=2x+2, and therefore
dy=(2x+2)\,dx.
When x=3 and dx=0.1,
dy=(2⋅3+2)(0.1)=0.8.
b. Since f(x)=\cos x , f'(x)=−\sin(x). This gives us
dy=−\sin x \,dx.
When x=3 and dx=0.1,
dy=−\sin(3)(0.1)=−0.1\sin(3).
For y=e^{x^2}, find dy.
- Hint
-
dy=f'(x)\,dx
- Answer
-
dy=2xe^{x^2}dx
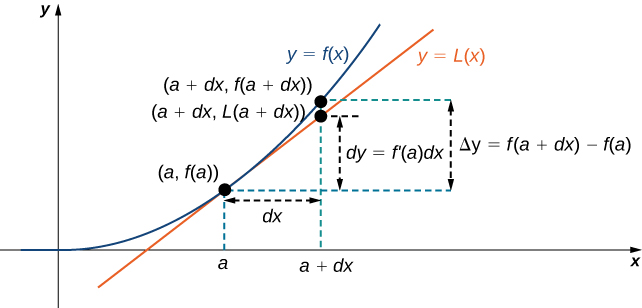
We now connect differentials to linear approximations. Differentials can be used to estimate the change in the value of a function resulting from a small change in input values. Consider a function f that is differentiable at point a. Suppose the input x changes by a small amount. We are interested in how much the output y changes. If x changes from a to a+dx, then the change in x is dx (also denoted Δx), and the change in y is given by
Δy=f(a+dx)−f(a). \nonumber
Instead of calculating the exact change in y, however, it is often easier to approximate the change in y by using a linear approximation. For x near a, f(x) can be approximated by the linear approximation (Equation \ref{linearapprox})
L(x)=f(a)+f'(a)(x−a). \nonumber
Therefore, if dx is small,
f(a+dx)≈L(a+dx)=f(a)+f'(a)(a+dx−a). \nonumber
That is,
f(a+dx)−f(a)≈L(a+dx)−f(a)=f'(a)\,dx. \nonumber
In other words, the actual change in the function f if x increases from a to a+dx is approximately the difference between L(a+dx) and f(a), where L(x) is the linear approximation of f at a. By definition of L(x), this difference is equal to f'(a)\,dx. In summary,
Δy=f(a+dx)−f(a)≈L(a+dx)−f(a)=f'(a)\,dx=dy. \nonumber
Therefore, we can use the differential dy=f'(a)\,dx to approximate the change in y if x increases from x=a to x=a+dx. We can see this in the following graph.
We now take a look at how to use differentials to approximate the change in the value of the function that results from a small change in the value of the input. Note the calculation with differentials is much simpler than calculating actual values of functions and the result is very close to what we would obtain with the more exact calculation.
Let y=x^2+2x. Compute Δy and dy at x=3 if dx=0.1.
Solution
The actual change in y if x changes from x=3 to x=3.1 is given by
Δy=f(3.1)−f(3)=[(3.1)^2+2(3.1)]−[3^2+2(3)]=0.81.
The approximate change in y is given by dy=f'(3)\,dx. Since f'(x)=2x+2, we have
dy=f'(3)\,dx=(2(3)+2)(0.1)=0.8.
For y=x^2+2x, find Δy and dy at x=3 if dx=0.2.
- Hint
-
dy=f'(3)\,dx, \;Δy=f(3.2)−f(3)
- Answer
-
dy=1.6, \; Δy=1.64
Calculating the Amount of Error
Any type of measurement is prone to a certain amount of error. In many applications, certain quantities are calculated based on measurements. For example, the area of a circle is calculated by measuring the radius of the circle. An error in the measurement of the radius leads to an error in the computed value of the area. Here we examine this type of error and study how differentials can be used to estimate the error.
Consider a function f with an input that is a measured quantity. Suppose the exact value of the measured quantity is a, but the measured value is a+dx. We say the measurement error is dx (or Δx). As a result, an error occurs in the calculated quantity f(x). This type of error is known as a propagated error and is given by
Δy=f(a+dx)−f(a). \nonumber
Since all measurements are prone to some degree of error, we do not know the exact value of a measured quantity, so we cannot calculate the propagated error exactly. However, given an estimate of the accuracy of a measurement, we can use differentials to approximate the propagated error Δy. Specifically, if f is a differentiable function at a,the propagated error is
Δy≈dy=f'(a)\,dx. \nonumber
Unfortunately, we do not know the exact value a. However, we can use the measured value a+dx, and estimate
Δy≈dy≈f'(a+dx)\,dx. \nonumber
In the next example, we look at how differentials can be used to estimate the error in calculating the volume of a box if we assume the measurement of the side length is made with a certain amount of accuracy.
Suppose the side length of a cube is measured to be 5 cm with an accuracy of 0.1 cm.
- Use differentials to estimate the error in the computed volume of the cube.
- Compute the volume of the cube if the side length is (i) 4.9 cm and (ii) 5.1 cm to compare the estimated error with the actual potential error.
Solution
a. The measurement of the side length is accurate to within ±0.1 cm. Therefore,
−0.1≤dx≤0.1.
The volume of a cube is given by V=x^3, which leads to
dV=3x^2dx.
Using the measured side length of 5 cm, we can estimate that
−3(5)^2(0.1)≤dV≤3(5)^2(0.1).
Therefore,
−7.5≤dV≤7.5.
b. If the side length is actually 4.9 cm, then the volume of the cube is
V(4.9)=(4.9)^3=117.649\text{cm}^3.
If the side length is actually 5.1 cm, then the volume of the cube is
V(5.1)=(5.1)^3=132.651\text{cm}^3.
Therefore, the actual volume of the cube is between 117.649 and 132.651. Since the side length is measured to be 5 cm, the computed volume is V(5)=5^3=125. Therefore, the error in the computed volume is
117.649−125≤ΔV≤132.651−125.
That is,
−7.351≤ΔV≤7.651.
We see the estimated error dV is relatively close to the actual potential error in the computed volume.
Estimate the error in the computed volume of a cube if the side length is measured to be 6 cm with an accuracy of 0.2 cm.
- Hint
-
dV=3x^2dx
- Answer
-
The volume measurement is accurate to within 21.6\,\text{cm}^3.
The measurement error dx\ (=Δx) and the propagated error Δy are absolute errors. We are typically interested in the size of an error relative to the size of the quantity being measured or calculated. Given an absolute error Δq for a particular quantity, we define the relative error as \frac{Δq}{q}, where q is the actual value of the quantity. The percentage error is the relative error expressed as a percentage. For example, if we measure the height of a ladder to be 63 in. when the actual height is 62 in., the absolute error is 1 in. but the relative error is \frac{1}{62}=0.016, or 1.6\%. By comparison, if we measure the width of a piece of cardboard to be 8.25 in. when the actual width is 8 in., our absolute error is \frac{1}{4} in., whereas the relative error is \frac{0.25}{8}=\frac{1}{32}, or 3.1\%. Therefore, the percentage error in the measurement of the cardboard is larger, even though 0.25 in. is less than 1 in.
An astronaut using a camera measures the radius of Earth as 4000 mi with an error of ±80 mi. Let’s use differentials to estimate the relative and percentage error of using this radius measurement to calculate the volume of Earth, assuming the planet is a perfect sphere.
Solution: If the measurement of the radius is accurate to within ±80, we have
−80≤dr≤80.
Since the volume of a sphere is given by V=(\frac{4}{3})πr^3, we have
dV=4πr^2dr.
Using the measured radius of 4000 mi, we can estimate
−4π(4000)^2(80)≤dV≤4π(4000)^2(80).
To estimate the relative error, consider \dfrac{dV}{V}. Since we do not know the exact value of the volume V, use the measured radius r=4000 mi to estimate V. We obtain V≈(\frac{4}{3})π(4000)^3. Therefore the relative error satisfies
\frac{−4π(4000)^2(80)}{4π(4000)^3/3}≤\dfrac{dV}{V}≤\frac{4π(4000)^2(80)}{4π(4000)^3/3},
which simplifies to
−0.06≤\dfrac{dV}{V}≤0.06.
The relative error is 0.06 and the percentage error is 6\%.
Determine the percentage error if the radius of Earth is measured to be 3950 mi with an error of ±100 mi.
- Hint
-
Use the fact that dV=4πr^2dr to find dV/V.
- Answer
-
7.6\%
Key Concepts
- A differentiable function y=f(x) can be approximated at a by the linear function
L(x)=f(a)+f'(a)(x−a).
- For a function y=f(x), if x changes from a to a+dx, then
dy=f'(x)\,dx
is an approximation for the change in y. The actual change in y is
Δy=f(a+dx)−f(a).
- A measurement error dx can lead to an error in a calculated quantity f(x). The error in the calculated quantity is known as the propagated error. The propagated error can be estimated by
dy≈f'(x)\,dx.
- To estimate the relative error of a particular quantity q, we estimate \frac{Δq}{q}.
Key Equations
- Linear approximation
L(x)=f(a)+f'(a)(x−a)
- A differential
dy=f'(x)\,dx
Glossary
- differential
- the differential dx is an independent variable that can be assigned any nonzero real number; the differential dy is defined to be dy=f'(x)\,dx
- differential form
- given a differentiable function y=f'(x), the equation dy=f'(x)\,dx is the differential form of the derivative of y with respect to x
- linear approximation
- the linear function L(x)=f(a)+f'(a)(x−a) is the linear approximation of f at x=a
- percentage error
- the relative error expressed as a percentage
- propagated error
- the error that results in a calculated quantity f(x) resulting from a measurement error dx
- relative error
- given an absolute error Δq for a particular quantity, \frac{Δq}{q} is the relative error.
- tangent line approximation (linearization)
- since the linear approximation of f at x=a is defined using the equation of the tangent line, the linear approximation of f at x=a is also known as the tangent line approximation to f at x=a