
7.5: Systems of Linear Equations – Special Cases
- Page ID
- 91342

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)In this section, you will learn to:
- Determine the linear systems that have no solution.
- Solve the linear systems that have infinitely many solutions.
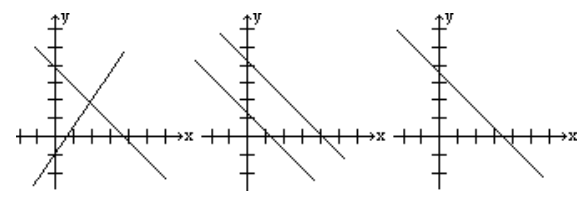
If we consider the intersection of two lines in a plane, three things can happen.
- The lines intersect in exactly one point. This is called an independent system.
- The lines are parallel, so they do not intersect. This is called an inconsistent system.
- The lines coincide; they intersect at infinitely many points. This is a dependent system.
The figures below show all three cases.
Every system of equations has either one solution, no solution, or infinitely many solutions.
In the last section, we used the Gauss-Jordan method to solve systems that had exactly one solution. In this section, we will determine the systems that have no solution, and solve the systems that have infinitely many solutions.
Solve the following system of equations:
\begin{aligned}
x+y&=7 \\
x+y&=9
\end{aligned}
Solution
Let us use the Gauss-Jordan method to solve this system. The augmented matrix is
\[\left[\begin{array}{llll}
1 & 1 & | & 7 \\
1 & 1 & | & 9
\end{array}\right] \quad\left[\begin{array}{l}
x+y=7 \\
x+y=9
\end{array}\right] \nonumber \]
If we multiply the first row by - 1 and add to the second row, we get
\[\left[\begin{array}{llll}
1 & 1 & | & 7 \\
0 & 0 & | & 2
\end{array}\right] \quad\left[\begin{array}{l}
x+y=7 \\
0 x+0 y=2
\end{array}\right] \nonumber \]
Since 0 cannot equal 2, the last equation cannot be true for any choices of x and y.
Alternatively, it is clear that the two lines are parallel; therefore, they do not intersect.
In the examples that follow, we are going to start using a calculator to row reduce the augmented matrix, in order to focus on understanding the answer rather than focusing on the process of carrying out the row operations.
Solve the following system of equations.
\[\begin{array}{l}
2 x+3 y-4 z=7 \\
3 x+4 y-2 z=9 \\
5 x+7 y-6 z=20
\end{array} \nonumber \]
Solution
We enter the following augmented matrix in the calculator.
\[\left[\begin{array}{ccccc}
2 & 3 & -4 & | & 7 \\
3 & 4 & -2 & | & 9 \\
5 & 7 & -6 & | & 20
\end{array}\right] \nonumber \]
Now by pressing the key to obtain the reduced row-echelon form, we get
\[\left[\begin{array}{ccccc}
1 & 0 & 10 & | & 0 \\
0 & 1 & -8 & | & 0 \\
0 & 0 & 0 & | & 1
\end{array}\right] \nonumber \]
The last row states that \(0x + 0y + 0z = 1\). But the left side of the equation is equal
to 0. So this last row states 0 = 1, which is a contradiction, a false statement.
This bottom row indicates that the system is inconsistent; therefore, there is no solution.
Solve the following system of equations.
\begin{aligned}
x+y&=7 \\
x+y&=7
\end{aligned}
Solution
The problem clearly asks for the intersection of two lines that are the same; that is, the lines coincide. This means the lines intersect at an infinite number of points.
A few intersection points are listed as follows: (3, 4), (5, 2), (-1, 8), (-6, 13) etc. However, when a system has an infinite number of solutions, the solution is often expressed in the parametric form. This can be accomplished by assigning an arbitrary constant, t, to one of the variables, and then solving for the remaining variables. Therefore, if we let \(y = t\), then \(x = 7 - t\). Or we can say all ordered pairs of the form \((7 - t, t)\) satisfy the given system of equations.
Alternatively, while solving the Gauss-Jordan method, we will get the reduced row-echelon form given below.
\[\left[\begin{array}{llll}
1 & 1 & | & 7 \\
0 & 0 & | & 0
\end{array}\right] \nonumber \]
The row of all zeros, can simply be ignored. This row says \(0x + 0y = 0\); it provides no further information about the values of x and y that solve this system.
This leaves us with only one equation but two variables. And whenever there are more variables than the equations, the solution must be expressed as a parametric solution in terms of an arbitrary constant, as above.
Parametric Solution: \(\mathbf{x = 7 - t, y = t}\).
Solve the following system of equations.
\begin{aligned}
x+y+z&=2 \\
2 x+y-z&=3 \\
3 x+2 y&=5
\end{aligned}
Solution
The augmented matrix and the reduced row-echelon form are given below.
\[\left[\begin{array}{ccccc}
1 & 1 & 1 & | & 2 \\
2 & 1 & -1 & | & 3 \\
3 & 2 & 0 & | & 5
\end{array}\right] \text { Augmented Matrix for this system } \nonumber \]
\[\left[\begin{array}{ccccc}
1 & 0 & -2 & | & 1 \\
0 & 1 & 3 & | & 1 \\
0 & 0 & 0 & | & 0
\end{array}\right] \text { Reduced Row Echelon Form } \nonumber \]
Since the last equation dropped out, we are left with two equations and three variables. This means the system has infinite number of solutions. We express those solutions in the parametric form by letting the last variable \(z\) equal the parameter \(t\).
The first equation reads \(x - 2z = 1\), therefore, \(x = 1 + 2z\).
The second equation reads \(y + 3z = 1\), therefore, \(y = 1 - 3z\).
And now if we let \(z = t\), the parametric solution is expressed as follows:
Parametric Solution: \(\mathbf{x=1+2t, \quad y=1-3t, \quad z=t}\).
The reader should note that particular solutions, or specific solutions, to the system can be obtained by assigning values to the parameter t. For example:
- if we let \(t = 2\), we have the solution \(x = 5, y = -5, z = 2\): \((5, -5, 2)\)
- if we let \(t = 0\), we have the solution \(x = 1, y = 1, z = 0\): \((1, 1, 0)\).
Solve the following system of equations.
\[\begin{align*} x + 2y - 3z &= 5 \\[4pt] 2x + 4y - 6z &= 10 \\[4pt] 3x + 6y - 9z &= 15 \end{align*} \nonumber \]
Solution
The reduced row-echelon form is given below.
\[\left[\begin{array}{ccccc}
1 & 2 & -3 & | & 5 \\
0 & 0 & 0 & | & 0 \\
0 & 0 & 0 & | & 0
\end{array}\right] \nonumber \]
This time the last two equations drop out. We are left with one equation and three variables. Again, there are an infinite number of solutions. But this time the answer must be expressed in terms of two arbitrary constants.
If we let \(z = t\) and let \(y = s\), the first equation \(x + 2y -3z = 5\) results in \(x = 5 - 2s + 3t\).
We rewrite the parametric solution: \(\mathbf{x = 5 - 2s + 3t, \quad y = s, \quad z = t}\).
We summarize our discussion in the following table.
- If any row of the reduced row-echelon form of the matrix gives a false statement such as 0 = 1, the system is inconsistent and has no solution.
- If the reduced row echelon form has fewer equations than the variables and the system is consistent, then the system has an infinite number of solutions. Remember the rows that contain all zeros are dropped.
- If a system has an infinite number of solutions, the solution must be expressed in the parametric form.
- The number of arbitrary parameters equals the number of variables minus the number of equations.