
2.8: Bases as Coordinate Systems

- Last updated
- Mar 16, 2025
- Save as PDF

\newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} }
\newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}}
\newcommand{\id}{\mathrm{id}} \newcommand{\Span}{\mathrm{span}}
( \newcommand{\kernel}{\mathrm{null}\,}\) \newcommand{\range}{\mathrm{range}\,}
\newcommand{\RealPart}{\mathrm{Re}} \newcommand{\ImaginaryPart}{\mathrm{Im}}
\newcommand{\Argument}{\mathrm{Arg}} \newcommand{\norm}[1]{\| #1 \|}
\newcommand{\inner}[2]{\langle #1, #2 \rangle}
\newcommand{\Span}{\mathrm{span}}
\newcommand{\id}{\mathrm{id}}
\newcommand{\Span}{\mathrm{span}}
\newcommand{\kernel}{\mathrm{null}\,}
\newcommand{\range}{\mathrm{range}\,}
\newcommand{\RealPart}{\mathrm{Re}}
\newcommand{\ImaginaryPart}{\mathrm{Im}}
\newcommand{\Argument}{\mathrm{Arg}}
\newcommand{\norm}[1]{\| #1 \|}
\newcommand{\inner}[2]{\langle #1, #2 \rangle}
\newcommand{\Span}{\mathrm{span}} \newcommand{\AA}{\unicode[.8,0]{x212B}}
\newcommand{\vectorA}[1]{\vec{#1}} % arrow
\newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow
\newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} }
\newcommand{\vectorC}[1]{\textbf{#1}}
\newcommand{\vectorD}[1]{\overrightarrow{#1}}
\newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}}
\newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}}
\newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} }
\newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}}
\newcommand{\avec}{\mathbf a} \newcommand{\bvec}{\mathbf b} \newcommand{\cvec}{\mathbf c} \newcommand{\dvec}{\mathbf d} \newcommand{\dtil}{\widetilde{\mathbf d}} \newcommand{\evec}{\mathbf e} \newcommand{\fvec}{\mathbf f} \newcommand{\nvec}{\mathbf n} \newcommand{\pvec}{\mathbf p} \newcommand{\qvec}{\mathbf q} \newcommand{\svec}{\mathbf s} \newcommand{\tvec}{\mathbf t} \newcommand{\uvec}{\mathbf u} \newcommand{\vvec}{\mathbf v} \newcommand{\wvec}{\mathbf w} \newcommand{\xvec}{\mathbf x} \newcommand{\yvec}{\mathbf y} \newcommand{\zvec}{\mathbf z} \newcommand{\rvec}{\mathbf r} \newcommand{\mvec}{\mathbf m} \newcommand{\zerovec}{\mathbf 0} \newcommand{\onevec}{\mathbf 1} \newcommand{\real}{\mathbb R} \newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]} \newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]} \newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]} \newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]} \newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]} \newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]} \newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]} \newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]} \newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]} \newcommand{\laspan}[1]{\text{Span}\{#1\}} \newcommand{\bcal}{\cal B} \newcommand{\ccal}{\cal C} \newcommand{\scal}{\cal S} \newcommand{\wcal}{\cal W} \newcommand{\ecal}{\cal E} \newcommand{\coords}[2]{\left\{#1\right\}_{#2}} \newcommand{\gray}[1]{\color{gray}{#1}} \newcommand{\lgray}[1]{\color{lightgray}{#1}} \newcommand{\rank}{\operatorname{rank}} \newcommand{\row}{\text{Row}} \newcommand{\col}{\text{Col}} \renewcommand{\row}{\text{Row}} \newcommand{\nul}{\text{Nul}} \newcommand{\var}{\text{Var}} \newcommand{\corr}{\text{corr}} \newcommand{\len}[1]{\left|#1\right|} \newcommand{\bbar}{\overline{\bvec}} \newcommand{\bhat}{\widehat{\bvec}} \newcommand{\bperp}{\bvec^\perp} \newcommand{\xhat}{\widehat{\xvec}} \newcommand{\vhat}{\widehat{\vvec}} \newcommand{\uhat}{\widehat{\uvec}} \newcommand{\what}{\widehat{\wvec}} \newcommand{\Sighat}{\widehat{\Sigma}} \newcommand{\lt}{<} \newcommand{\gt}{>} \newcommand{\amp}{&} \definecolor{fillinmathshade}{gray}{0.9}- Learn to view a basis as a coordinate system on a subspace.
- Recipes: compute the \mathcal{B}-coordinates of a vector, compute the usual coordinates of a vector from its \mathcal{B}-coordinates.
- Picture: the \mathcal{B}-coordinates of a vector using its location on a nonstandard coordinate grid.
- Vocabulary word: \mathcal{B}-coordinates.
In this section, we interpret a basis of a subspace V as a coordinate system on V, and we learn how to write a vector in V in that coordinate system.
If \mathcal{B}=\{v_1,\: v_2,\cdots ,v_m\} is a basis for a subspace V, then any vector x in V can be written as a linear combination
x=c_1v_1+c_2v_2+\cdots +c_mv_m\nonumber
in exactly one way.
- Proof
-
Recall that to say \mathcal{B} is a basis for V means that \mathcal{B} spans V and \mathcal{B} is linearly independent. Since \mathcal{B} spans V, we can write any x in V as a linear combination of v_1,\: v_2,\cdots ,v_m. For uniqueness, suppose that we had two such expressions:
\begin{aligned}x&=c_1v_1+c_2v_2+\cdots +c_mv_m \\ x&=c_1'v_1+c_2'v_2+\cdots +c_m'v_m.\end{aligned}
Subtracting the first equation from the second yields
0=x-x=(c_1-c_1')v_1 +(c_2-c_2')v_2+\cdots +(c_m-c_m')v_m.\nonumber
Since \mathcal{B} is linearly independent, the only solution to the above equation is the trivial solution: all the coefficients must be zero. It follows that c_i−c_i' for all i, which proves that c_1=c_1',\: c_2=c_2',\cdots ,c_m=c_m'.
Consider the standard bases of \mathbb{R}^{3} from Example 2.7.3 in Section 2.7.
e_1=\left(\begin{array}{c}1\\0\\0\end{array}\right),\quad e_2=\left(\begin{array}{c}0\\1\\0\end{array}\right),\quad e_3=\left(\begin{array}{c}0\\0\\1\end{array}\right).\nonumber
According to the above fact, Fact \PageIndex{1}, every vector in \mathbb{R}^{3} can be written as a linear combination of e_1, e_2, e_3, with unique coefficients. For example,
v=\left(\begin{array}{c}\color{Red}{3}\\ \color{blue}{5} \\ \color{Green}{-2}\end{array}\right)\color{black}{=}\color{red}{3}\color{black}{\left(\begin{array}{c}1\\0\\0\end{array}\right)+}\color{blue}{5}\color{black}{\left(\begin{array}{c}0\\1\\0\end{array}\right)}\color{Green}{-2}\color{black}{\left(\begin{array}{c}0\\0\\1\end{array}\right)=}\color{Red}{3}\color{black}{e_1+}\color{blue}{5}\color{black}{e_2}\color{Green}{-2}\color{black}{e_3.}\nonumber
In this case, the coordinates of v are exactly the coefficients of e_1, e_2, e_3.
What exactly are coordinates, anyway? One way to think of coordinates is that they give directions for how to get to a certain point from the origin. In the above example, the linear combination 3e_1+5e_2−2e_3 can be thought of as the following list of instructions: start at the origin, travel 3 units north, then travel 5 units east, then 2 units down.
Let \mathcal{B}=\{v_1,\: v_2,\cdots ,v_m\} be a basis of a subspace V, and let
x=c_1v_1+c_2v_2+\cdots+c_mv_m\nonumber
be a vector in V. The coefficients c_1,\:c_2,\cdots,c_m are the coordinates of x with respect to \mathcal{B}. The \mathcal{B}-coordinate vector of x is the vector
[x]_{\mathcal{B}}=\left(\begin{array}{c}c_1 \\c_2\\ \vdots \\ c_m\end{array}\right)\quad\text{ in }\mathbb{R}^{m}.\nonumber
If we change the basis, then we can still give instructions for how to get to the point (3,\:5,\:−2), but the instructions will be different. Say for example we take the basis
v_1=e_1+e_2=\left(\begin{array}{c}1\\1\\0\end{array}\right),\quad v_2=e_2=\left(\begin{array}{c}0\\1\\0\end{array}\right),\quad v_3=e_3=\left(\begin{array}{c}0\\0\\1\end{array}\right).\nonumber
We can write (3,\:5,\:−2) in this basis as 3v_1+2v_2−2v_3. In other words: start at the origin, travel northeast 3 times as far as v_1, then 2 units east, then 2 units down. In this situation, we can say that “3 is the v_1-coordinate of (3,\:5,\:−2), 2 is the v_2-coordinate of (3,\:5,\:−2), and −2 is the v_3-coordinate of (3,\:5,\:−2).”
The above definition, Definition \PageIndex{1}, gives a way of using \mathbb{R}_m to label the points of a subspace of dimension m: a point is simply labeled by its \mathcal{B}-coordinate vector. For instance, if we choose a basis for a plane, we can label the points of that plane with the points of \mathbb{R}^2.
Define
v_1=\left(\begin{array}{c}1\\1\end{array}\right),\quad v_2=\left(\begin{array}{c}1\\-1\end{array}\right),\quad\mathcal{B}=\{v_1,\:v_2\}.\nonumber
- Verify that \mathcal{B} is a basis for \mathbb{R}^2.
- If [w]_{\mathcal{B}}=\left(\begin{array}{c}1\\2\end{array}\right), then what is w?
- Find the \mathcal{B}-coordinates of v=\left(\begin{array}{c}5\\3\end{array}\right).
Solution
- By the basis theorem in Section 2.7, Theorem 2.7.3, any two linearly independent vectors form a basis for \mathbb{R}^2. Clearly v_1,\:v_2 are not multiples of each other, so they are linearly independent.
- To say [w]_{\mathcal{B}}=\left(\begin{array}{c}1\\2\end{array}\right) means that 1 is the v_1-coordinate of w, and that 2 is the v_2-coordinate:
w=v_1+2v_2=\left(\begin{array}{c}1\\1\end{array}\right)+2\left(\begin{array}{c}1\\-1\end{array}\right)=\left(\begin{array}{c}3\\-1\end{array}\right).\nonumber - We have to solve the vector equation v=c_1v_1+c_2v_2 in the unknowns c_1,\: c_2. We form an augmented matrix and row reduce:
\left(\begin{array}{cc|c} 1&1&5 \\ 1&-1&3\end{array}\right) \quad\xrightarrow{\text{RREF}}\quad\left(\begin{array}{cc|c} 1&0&4 \\ 0&1&1\end{array}\right).\nonumber
We have c_1=4 and c_2=1, so v=4v_1+v_2 and [v]_{\mathcal{B}}=\left(\begin{array}{c}4\\1\end{array}\right).
In the following picture, we indicate the coordinate system defined by \mathcal{B} by drawing lines parallel to the “v_1-axis” and “v_2-axis”. Using this grid it is easy to see that the \mathcal{B}-coordinates of v are \left(\begin{array}{c}5\\1\end{array}\right), and that the \mathcal{B}-coordinates of w are \left(\begin{array}{c}1\\2\end{array}\right).

Figure \PageIndex{1}
This picture could be the grid of streets in Palo Alto, California. Residents of Palo Alto refer to northwest as “north” and to northeast as “east”. There is a reason for this: the old road to San Francisco is called El Camino Real, and that road runs from the southeast to the northwest in Palo Alto. So when a Palo Alto resident says “go south two blocks and east one block”, they are giving directions from the origin to the Whole Foods at w.

Figure \PageIndex{2}: A picture of the basis \mathcal{B}=\{v_1,\: v_2\} of \mathbb{R}^2. The grid indicates the coordinate system defined by the basis \mathcal{B}; one set of lines measures the v_1-coordinate, and the other set measures the v_2-coordinate. Use the sliders to find the \mathcal{B}-coordinates of w.
Let
v_1=\left(\begin{array}{c}2\\-1\\1\end{array}\right)\quad v_2=\left(\begin{array}{c}1\\0\\-1\end{array}\right).\nonumber
These form a basis \mathcal{B} for a plane V=\text{Span}\{v_1,\: v_2\} in \mathbb{R}^3. We indicate the coordinate system defined by \mathcal{B} by drawing lines parallel to the “v_1-axis” and “v_2-axis”:

Figure \PageIndex{3}
We can see from the picture that the v_1-coordinate of \color{red}{u_1} is equal to 1, as is the v_2-coordinate, so [\color{red}{u_1}\color{black}{]_{\mathcal{B}}=\left(\begin{array}{c}1\\1\end{array}\right)}. Similarly, we have
[\color{blue}{u_2}\color{black}{]_{\mathcal{B}}}=\left(\begin{array}{c}-1 \\ \frac{1}{2}\end{array}\right)\quad [\color{Green}{u_3}\color{black}{]_{\mathcal{B}}}=\left(\begin{array}{c}\frac{3}{2} \\ -\frac{1}{2}\end{array}\right)\quad [\color{orange}{u_4}\color{black}{]_{\mathcal{B}}}=\left(\begin{array}{c}0\\ \frac{3}{2}\end{array}\right).\nonumber

Figure \PageIndex{4}: Left: the \mathcal{B}-coordinates of a vector x. Right: the vector x. The violet grid on the right is a picture of the coordinate system defined by the basis \mathcal{B}; one set of lines measures the v_1-coordinate, and the other set measures the v_2-coordinate. Drag the heads of the vectors x and [x]_{\mathcal{B}} to understand the correspondence between x and its \mathcal{B}-coordinate vector.
Define
v_1=\left(\begin{array}{c}1\\0\\1\end{array}\right),\: v_2=\left(\begin{array}{c}1\\1\\1\end{array}\right),\quad\mathcal{B}=\{v_1,\: v_2\},\quad V=\text{Span}\{v_1,\: v_2\}.\nonumber
- Verify that \mathcal{B} is a basis for V.
- If [w]_{\mathcal{B}}=\left(\begin{array}{c}5\\2\end{array}\right), then what is w?
- Find the \mathcal{B}-coordinates of v=\left(\begin{array}{c}5\\3\\5\end{array}\right).
Solution
- We need to verify that \mathcal{B} spans V, and that it is linearly independent. By definition, V is the span of \mathcal{B}; since v_1 and v_2 are not multiples of each other, they are linearly independent. This shows in particular that V is a plane.
- To say [w]_{\mathcal{B}}=\left(\begin{array}{c}5\\2\end{array}\right) means that 5 is the v_1-coordinate of w, and that 2 is the v_2-coordinate:
w=5v_1 +2v_2=5\left(\begin{array}{c}1\\0\\1\end{array}\right)+2\left(\begin{array}{c}1\\1\\1\end{array}\right)=\left(\begin{array}{c}7\\2\\7\end{array}\right).\nonumber - We have to solve the vector equation v=c_1v_1+c_2v_2 in the unknowns c_1,\: c_2. We form an augmented matrix and row reduce:
\left(\begin{array}{cc|c} 1&1&5\\0&1&3\\1&1&5\end{array}\right) \quad\xrightarrow{\text{RREF}}\quad \left(\begin{array}{cc|c} 1&0&2\\0&1&3\\0&0&0\end{array}\right).\nonumber
We have c_1=2 and c_2=3, so v=2v_1+3v_2 and [v]_{\mathcal{B}}=\left(\begin{array}{c}2\\3\end{array}\right).

Figure \PageIndex{5}: A picture of the plane V and the basis \mathcal{B}=\{v_1,\: v_2\}. The violet grid is a picture of the coordinate system defined by the basis \mathcal{B}; one set of lines measures the v_1-coordinate, and the other set measures the v_2-coordinate. Use the sliders to find the \mathcal{B}-coordinates of v.
Define
v_1=\left(\begin{array}{c}2\\3\\2\end{array}\right),\quad v_2=\left(\begin{array}{c}-1\\1\\1\end{array}\right),\quad v_3=\left(\begin{array}{c}2\\8\\6\end{array}\right),\quad V=\text{Span}\{v_1,\: v_2,\: v_3\}.\nonumber
- Find a basis \mathcal{B} for V.
- Find the \mathcal{B}-coordinates of x=\left(\begin{array}{c}4\\11\\8\end{array}\right).
Solution
- We write V as the column space of a matrix A, then row reduce to find the pivot columns, as in Example 2.7.6, in Section 2.7.
A=\left(\begin{array}{ccc}2&-1&2\\3&1&8\\2&1&6\end{array}\right) \quad\xrightarrow{\text{RREF}}\quad \left(\begin{array}{ccc}1&0&2\\0&1&2\\0&0&0\end{array}\right).\nonumber
The first two columns are pivot columns, so we can take \mathcal{B}=\{v_1,\:v_2\} as our basis for V. - We have to solve the vector equation x=c_1v_1+c_2v_2. We form an augmented matrix and row reduce:
\left(\begin{array}{cc|c} 2&-1&4 \\ 3&1&11\\2&1&8\end{array}\right) \quad\xrightarrow{\text{RREF}}\quad \left(\begin{array}{cc|c} 1&0&3\\0&1&2\\0&0&0\end{array}\right).\nonumber
We have c_1=3 and c_2=2, so x=3v_1+2v_2, and thus [x]_{\mathcal{B}}=\left(\begin{array}{c}3\\2\end{array}\right).
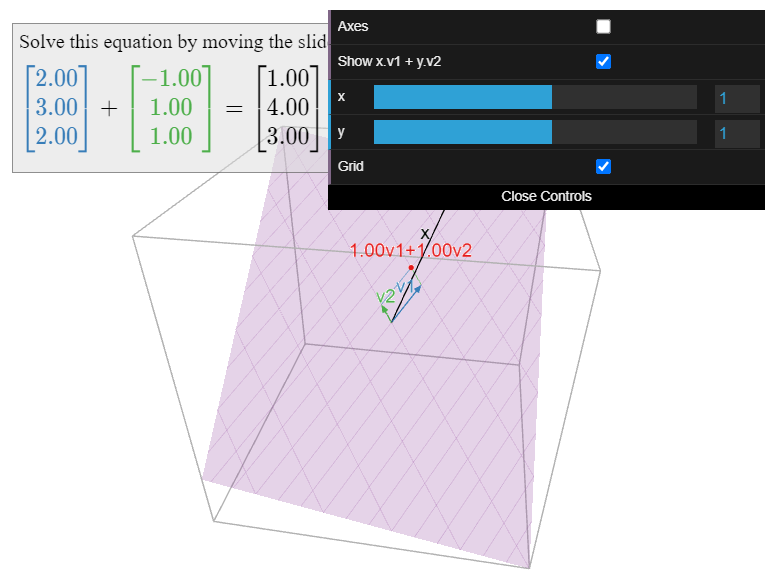
Figure \PageIndex{6}: A picture of the plane V and the basis \mathcal{B}=\{v_1,\:v_2\}. The violet grid is a picture of the coordinate system defined by the basis \mathcal{B}; one set of lines measures the v_1-coordinate, and the other set measures the v_2-coordinate. Use the sliders to find the \mathcal{B}-coordinates of x.
If \mathcal{B}=\{v_1,\: v_2,\cdots ,v_m\} is a basis for a subspace V and x is in V, then
[x]_{\mathcal{B}}=\left(\begin{array}{c}c_1 \\ c_2 \\ \vdots \\ c_m\end{array}\right)\quad\text{means}\quad x=c_1v_1+c_2v_2+\cdots c_mv_m.\nonumber
Finding the \mathcal{B}-coordinates of x means solving the vector equation
x=c_1v_1+c_2v_2+\cdots +c_mv_m\nonumber
in the unknowns c_1,\: c_2,\cdots ,c_m. This generally means row reducing the augmented matrix
\left(\begin{array}{cccc|c} |&|&\quad&|&| \\ v_1&v_2&\quad &v_m&x \\ |&|&\quad &|&|\end{array}\right).\nonumber
Let \mathcal{B}=\{v_1,\: v_2,\cdots ,v_m\} be a basis of a subspace V. Finding the \mathcal{B}-coordinates of a vector x means solving the vector equation
x=c_1v_1+c_2v_2+\cdots +c_mv_m.\nonumber
If x is not in V, then this equation has no solution, as x is not in V=\text{Span}\{v_1,\: v_2,\cdots ,v_m\}. In other words, the above equation is inconsistent when x is not in V.