
5.0: Antidervatives and Indefinite Integration (Revisited)
- Page ID
- 13743
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)We have spent considerable time considering the derivatives of a function and their applications. In the following chapters, we are going to starting thinking in "the other direction." That is, given a function \(f(x)\), we are going to consider functions \(F(x)\) such that \(F'(x) = f(x)\). There are numerous reasons this will prove to be useful: these functions will help us compute areas, volumes, mass, force, pressure, work, and much more.
Given a function \(y=f(x)\), a differential equation is one that incorporates \(y\), \(x\), and the derivatives of \(y\). For instance, a simple differential equation is:
\[y' = 2x.\]
Solving a differential equation amounts to finding a function \(y\) that satisfies the given equation. Take a moment and consider that equation; can you find a function \(y\) such that \(y' = 2x\)?
Can you find another?
And yet another?
Hopefully one was able to come up with at least one solution: \(y = x^2\). "Finding another" may have seemed impossible until one realizes that a function like \(y=x^2+1\) also has a derivative of \(2x\). Once that discovery is made, finding "yet another" is not difficult; the function \(y = x^2 + 123,456,789\) also has a derivative of \(2x\). The differential equation \(y' = 2x\) has many solutions. This leads us to some definitions.
Definition \(\PageIndex{1}\): Antiderivatives and Indefinite Integrals
Let a function \(f(x)\) be given. An antiderivative of \(f(x)\) is a function \(F(x)\) such that \(F'(x) = f(x)\).
The set of all antiderivatives of \(f(x)\) is the indefinite integral of \(f\), denoted by
\[\int f(x) \ dx.\]
Make a note about our definition: we refer to an antiderivative of \(f\), as opposed to the antiderivative of \(f\), since there is always an infinite number of them. We often use upper-case letters to denote antiderivatives.
Knowing one antiderivative of \(f\) allows us to find infinitely more, simply by adding a constant. Not only does this give us more antiderivatives, it gives us all of them.
Theorem \(\PageIndex{1}\): Antiderivative Forms
Let \(F(x)\) and \(G(x)\) be antiderivatives of \(f(x)\). Then there exists a constant \(C\) such that
\[G(x) = F(x) + C.\]
Given a function \(f\) and one of its antiderivatives \(F\), we know all antiderivatives of \(f\) have the form \(F(x) + C\) for some constant \(C\). Using Definition \(\PageIndex{1}\), we can say that
\[\int f(x) \ dx = F(x) + C.\]
Let's analyze this indefinite integral notation.
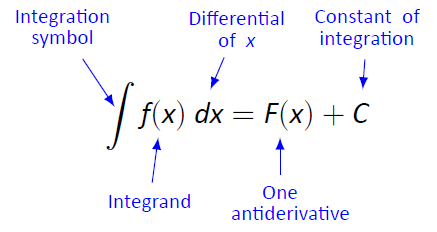
Figure \(\PageIndex{1}\) shows the typical notation of the indefinite integral. The integration symbol, \(\int\), is, in reality, an "elongated S," representing "take the sum." We will later see how sums and antiderivatives are related.
The function we want to find an antiderivative of is called the integrand. It contains the differential of the variable we are integrating with respect to. The \(\int\) symbol and the differential \(dx\) are not "bookends" with a function sandwiched in between; rather, the symbol \(\int\) means "find all antiderivatives of what follows," and the function \(f(x)\) and \(dx\) are multiplied together; the \(dx\) does not "just sit there."
Let's practice using this notation.
Example \(\PageIndex{1}\): Evaluating indefinite integrals
Evaluate \(\displaystyle \int \sin x\ dx.\)
Solution
We are asked to find all functions \(F(x)\) such that \(F'(x) = \sin x\). Some thought will lead us to one solution: \(F(x) = -\cos x\), because \(\frac{d}{dx}(-\cos x) = \sin x\).
The indefinite integral of \(\sin x\) is thus \(-\cos x\), plus a constant of integration. So:
\[\int \sin x \ dx = -\cos x + C.\]
A commonly asked question is "What happened to the \(dx\)?" The unenlightened response is "Don't worry about it. It just goes away." A full understanding includes the following.
This process of antidifferentiation is really solving a differential question. The integral
\[\int \sin x\ dx\]
presents us with a differential, \(dy = \sin x\ dx\). It is asking: "What is \(y\)?" We found lots of solutions, all of the form \(y = -\cos x+C\).
Letting \(dy = \sin x\ dx\), rewrite
\[\int \sin x \ dx \quad \text{as}\quad \int dy.\]
This is asking: "What functions have a differential of the form \(dy\)?" The answer is "Functions of the form \(y+C\), where \(C\) is a constant." What is \(y\)? We have lots of choices, all differing by a constant; the simplest choice is \(y = -\cos x\).
Understanding all of this is more important later as we try to find antiderivatives of more complicated functions. In this section, we will simply explore the rules of indefinite integration, and one can succeed for now with answering "What happened to the \(dx\)?" with "It went away."
Let's practice once more before stating integration rules.
Example \(\PageIndex{2}\): Evaluating indefinite integrals
Evaluate \(\int (3x^2 + 4x+5)\ dx\).
Solution
We seek a function \(F(x)\) whose derivative is \(3x^2+4x+5\). When taking derivatives, we can consider functions term--by--term, so we can likely do that here.
What functions have a derivative of \(3x^2\)? Some thought will lead us to a cubic, specifically \(x^3+C_1\), where \(C_1\) is a constant.
What functions have a derivative of \(4x\)? Here the \(x\) term is raised to the first power, so we likely seek a quadratic. Some thought should lead us to \(2x^2+C_2\), where \(C_2\) is a constant.
Finally, what functions have a derivative of \(5\)? Functions of the form \(5x+C_3\), where \(C_3\) is a constant.
Our answer appears to be
\[\int (3x^2+4x+5)\ dx = x^3+C_1+2x^2+C_2+5x+C_3.\]
We do not need three separate constants of integration; combine them as one constant, giving the final answer of
\[\int (3x^2+4x+5)\ dx = x^3+2x^2+5x+C.\]
It is easy to verify our answer; take the derivative of \(x^3+2x^3+5x+C\) and see we indeed get \(3x^2+4x+5\).
This final step of "verifying our answer" is important both practically and theoretically. In general, taking derivatives is easier than finding antiderivatives so checking our work is easy and vital as we learn.
We also see that taking the derivative of our answer returns the function in the integrand. Thus we can say that:
\[\frac{d}{dx}\left(\int f(x)\ dx\right) = f(x).\]
Differentiation "undoes" the work done by antidifferentiation.
Theorem 27 gave a list of the derivatives of common functions we had learned at that point. We restate part of that list here to stress the relationship between derivatives and antiderivatives. This list will also be useful as a glossary of common antiderivatives as we learn.
Theorem \(\PageIndex{2}\): Derivatives and Antiderivatives
| Common Differentiation Rules | Common Indefinite Integration Rules |
|
|
We highlight a few important points from Theorem \(\PageIndex{2}\):
- Rule #1 states \(\int c\cdot f(x)\ dx = c\cdot \int f(x)\ dx\). This is the Constant Multiple Rule: we can temporarily ignore constants when finding antiderivatives, just as we did when computing derivatives (i.e., \(\frac{d}{dx}\big(3x^2\big)\) is just as easy to compute as \(\frac{d}{dx}\big(x^2\big)\)). An example:
\[\int 5\cos x\ dx = 5\cdot\int \cos x\ dx = 5\cdot (\sin x+C) = 5\sin x + C.\[
In the last step we can consider the constant as also being multiplied by 5, but "5 times a constant" is still a constant, so we just write "\(C\),".
- Rule #2 is the Sum/Difference Rule: we can split integrals apart when the integrand contains terms that are added/subtracted, as we did in Example \(\PageIndex{2}\). So:
\[\begin{align} \int(3x^2+4x+5)\ dx &= \int 3x^2\ dx + \int 4x\ dx + \int 5\ dx \\ &= 3\int x^2\ dx + 4\int x\ dx + \int 5 \ dx\\ &= 3\cdot \frac13x^3 + 4\cdot \frac12x^2+5x+C\\ &= x^3+2x^2+5x+C \end{align}\]
In practice we generally do not write out all these steps, but we demonstrate them here for completeness.
- Rule #5 is the Power Rule of indefinite integration. There are two important things to keep in mind:
- Notice the restriction that \(n\neq -1\). This is important: \(\int \frac{1}{x}\ dx \neq \) "\(\frac{1}{0}x^0+C\)"; rather, see Rule #14.
- We are presenting antidifferentiation as the "inverse operation" of differentiation. Here is a useful quote to remember: "Inverse operations do the opposite things in the opposite order."
When taking a derivative using the Power Rule, we first multiply by the power, then second subtract 1 from the power. To find the antiderivative, do the opposite things in the opposite order: first add one to the power, then second divide by the power.
- Note that Rule #14 incorporates the absolute value of \(x\). The exercises will work the reader through why this is the case; for now, know the absolute value is important and cannot be ignored.
Initial Value Problems
In Section 2.3 we saw that the derivative of a position function gave a velocity function, and the derivative of a velocity function describes acceleration. We can now go "the other way:" the antiderivative of an acceleration function gives a velocity function, etc. While there is just one derivative of a given function, there are infinite antiderivatives. Therefore we cannot ask "What is the velocity of an object whose acceleration is \(-32\)ft/s\(^2\)?", since there is more than one answer.
We can find the answer if we provide more information with the question, as done in the following example. Often the additional information comes in the form of an initial value, a value of the function that one knows beforehand.
Example \(\PageIndex{3}\): Solving initial value problems
The acceleration due to gravity of a falling object is \(-32\) ft/s\(^2\). At time \(t=3\), a falling object had a velocity of \(-10\) ft/s. Find the equation of the object's velocity.
Solution
We want to know a velocity function, \(v(t)\). We know two things:
- The acceleration, i.e., \(v'(t)= -32\), and
- the velocity at a specific time, i.e., \(v(3) = -10\).
Using the first piece of information, we know that \(v(t)\) is an antiderivative of \(v'(t)=-32\). So we begin by finding the indefinite integral of \(-32\):
\[\int (-32)\ dt = -32t+C=v(t).\]
Now we use the fact that \(v(3)=-10\) to find \(C\):
\[\begin{align} v(t) &= -32t+C \\ v(3) &= -10 \\ -32(3)+C &= -10\\ C &= 86 \end{align}\]
Thus \(v(t)= -32t+86\). We can use this equation to understand the motion of the object: when \(t=0\), the object had a velocity of $v(0) = 86$ ft/s. Since the velocity is positive, the object was moving upward.
When did the object begin moving down? Immediately after \(v(t) = 0\):
\[-32t+86 = 0 \quad \Rightarrow\quad t = \frac{43}{16} \approx 2.69\text{s}.\]
Recognize that we are able to determine quite a bit about the path of the object knowing just its acceleration and its velocity at a single point in time.
Example \(\PageIndex{4}\): Solving initial value problems
Find \(f(t)\), given that \(f''(t) = \cos t\), \(f'(0) = 3\) and \(f(0) = 5\).
Solution
We start by finding \(f'(t)\), which is an antiderivative of \(f''(t)\):
\[\int f''(t)\ dt = \int \cos t\ dt = \sin t + C = f'(t).\]
So \(f'(t) = \sin t+C\) for the correct value of \(C\). We are given that \(f'(0) = 3\), so:
\[f'(0) = 3 \quad \Rightarrow \quad \sin 0+C = 3 \quad \Rightarrow \quad C=3.\]
Using the initial value, we have found \(f'(t) = \sin t+ 3.\)
We now find \(f(t)\) by integrating again.
\[f(t)=\int f'(t) \ dt = \int (\sin t+3)\ dt = -\cos t + 3t + C.\]
We are given that \(f(0) = 5\), so
\[\begin{align} -\cos 0 + 3(0) + C &= 5 \\ -1 + C &= 5\\ C &= 6 \end{align}\]
Thus \(f(t) = -\cos t + 3t + 6\).
This section introduced antiderivatives and the indefinite integral. We found they are needed when finding a function given information about its derivative(s). For instance, we found a position function given a velocity function.
In the next section, we will see how position and velocity are unexpectedly related by the areas of certain regions on a graph of the velocity function. Then, in Section 5.4, we will see how areas and antiderivatives are closely tied together.
Contributors and Attributions
Gregory Hartman (Virginia Military Institute). Contributions were made by Troy Siemers and Dimplekumar Chalishajar of VMI and Brian Heinold of Mount Saint Mary's University. This content is copyrighted by a Creative Commons Attribution - Noncommercial (BY-NC) License. http://www.apexcalculus.com/
Integrated by Justin Marshall.