
10.3: Polar Coordinates
- Page ID
- 8194
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Locate points in a plane by using polar coordinates.
- Convert points between rectangular and polar coordinates.
- Sketch polar curves from given equations.
- Convert equations between rectangular and polar coordinates.
- Identify symmetry in polar curves and equations.
The rectangular coordinate system (or Cartesian plane) provides a means of mapping points to ordered pairs and ordered pairs to points. This is called a one-to-one mapping from points in the plane to ordered pairs. The polar coordinate system provides an alternative method of mapping points to ordered pairs. In this section we see that in some circumstances, polar coordinates can be more useful than rectangular coordinates.
Defining Polar Coordinates
To find the coordinates of a point in the polar coordinate system, consider Figure \(\PageIndex{1}\). The point \(P\) has Cartesian coordinates \((x,y)\). The line segment connecting the origin to the point \(P\) measures the distance from the origin to \(P\) and has length \(r\). The angle between the positive x-axis and the line segment has measure \(θ\). This observation suggests a natural correspondence between the coordinate pair \((x,y)\) and the values \(r\) and \(θ\). This correspondence is the basis of the polar coordinate system. Note that every point in the Cartesian plane has two values (hence the term ordered pair) associated with it. In the polar coordinate system, each point also has two values associated with it: \(r\) and \(θ\).
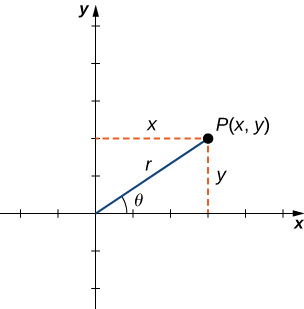
Using right-triangle trigonometry, the following equations are true for the point \(P\):
\[\cos θ=\dfrac{x}{r}\text{ so }x=r\cos θ \nonumber \]
\[\sin θ=\dfrac{y}{r}\text{ so }y=r\sin θ. \nonumber \]
Furthermore,
\[r^2=x^2+y^2 \nonumber \]
and
\[\tan θ=\dfrac{y}{x}. \nonumber \]
Each point \((x,y)\) in the Cartesian coordinate system can therefore be represented as an ordered pair \((r,θ)\) in the polar coordinate system. The first coordinate is called the radial coordinate and the second coordinate is called the angular coordinate. Every point in the plane can be represented in this form.
Note that the equation \(\tan θ=y/x\) has an infinite number of solutions for any ordered pair \((x,y)\). However, if we restrict the solutions to values between \(0\) and \(2π\) then we can assign a unique solution to the quadrant in which the original point \((x,y)\) is located. Then the corresponding value of \(r\) is positive, so \(r^2=x^2+y^2\).
Given a point \(P\) in the plane with Cartesian coordinates \((x,y)\) and polar coordinates \((r,θ)\), the following conversion formulas hold true:
\[\begin{align} x &=r\cos θ \label{eq1} \\[4pt] y &=r\sin θ \label{eq2}\end{align} \]
and
\[\begin{align} r^2 &= x^2+y^2 \label{eq3}\\[4pt] \tan θ &=\dfrac{y}{x} \label{eq4}\end{align}. \]
These formulas can be used to convert from rectangular to polar or from polar to rectangular coordinates. Notice that Equation \ref{eq3} is the Pythagorean theorem. (Figure \(\PageIndex{1}\)).
Convert each of the following points into polar coordinates.
- \((1,1)\)
- \((−3,4)\)
- \((0,3)\)
- \((5\sqrt{3},−5)\)
Convert each of the following points into rectangular coordinates.
- \((3,π/3)\)
- \((2,3π/2)\)
- \((6,−5π/6)\)
Solution
a. Use \(x=1\) and \(y=1\) in Equation \ref{eq3}:
\[\begin{align*} r^2 &=x^2+y^2 \\[4pt] &=1^2+1^2 \\ r &=\sqrt{2} \end{align*} \nonumber \]
and via Equation \ref{eq4}
\[\begin{align*} \tan θ &= \dfrac{y}{x} = \dfrac{1}{1}=1 \\[4pt] θ &=\dfrac{π}{4}. \end{align*}\]
Therefore this point can be represented as \((\sqrt{2},\dfrac{π}{4})\) in polar coordinates.
b. Use \(x=−3\) and \(y=4\) in Equation \ref{eq3}:
\[\begin{align*} r^2 &= x^2+y^2=(−3)^2+(4)^2 \\[4pt] r&=5 \end{align*}\]
and via Equation \ref{eq4}
\(\tan θ=\dfrac{y}{x}=−\dfrac{4}{3}\)
\(θ=\arctan(-\dfrac{4}{3})+π≈2.21.\)
Therefore this point can be represented as \((5,2.21)\) in polar coordinates.
c. Use \(x=0\) and \(y=3\) in Equation \ref{eq3}:
\(r^2=x^2+y^2=(3)^2+(0)^2=9+0\) \(r=3\)
and via Equation \ref{eq4}
\(\tan θ=\dfrac{y}{x}=\dfrac{3}{0}\).
Direct application of the second equation leads to division by zero. Graphing the point \((0,3)\) on the rectangular coordinate system reveals that the point is located on the positive y-axis. The angle between the positive x-axis and the positive y-axis is \(\dfrac{π}{2}\). Therefore this point can be represented as \((3,\dfrac{π}{2})\) in polar coordinates.
d. Use \(x=5\sqrt{3}\) and \(y=−5\) in Equation \ref{eq3}:
\(r^2=x^2+y^2=(5\sqrt{3})^2+(−5)^2=75+25\)
\(r=10\)
and via Equation \ref{eq4}
\(\tan θ=\dfrac{y}{x}=\dfrac{−5}{5\sqrt{3}}=−\dfrac{\sqrt{3}}{3}\)
\(θ=−\dfrac{π}{6}\).
Therefore this point can be represented as \((10,−\dfrac{π}{6})\) in polar coordinates.
e. Use \(r=3\) and \(θ=\dfrac{π}{3}\) in Equation \ref{eq1}:
\(x=r\cos θ=3\cos(\dfrac{π}{3})=3(\dfrac{1}{2})=\dfrac{3}{2}\)
and
\(y=r\sin θ=3\sin(\dfrac{π}{3})=3(\dfrac{\sqrt{3}}{2})=\dfrac{3\sqrt{3}}{2}\).
Therefore this point can be represented as \((\dfrac{3}{2},\dfrac{3\sqrt{3}}{2})\) in rectangular coordinates.
f. Use \(r=2\) and \(θ=\dfrac{3π}{2}\) in Equation \ref{eq1}:
\(x=r\cos θ=2\cos(\dfrac{3π}{2})=2(0)=0\)
and
\(y=r\sin θ=2\sin(\dfrac{3π}{2})=2(−1)=−2.\)
Therefore this point can be represented as \((0,−2)\) in rectangular coordinates.
g. Use \(r=6\) and \(θ=−\dfrac{5π}{6}\) in Equation \ref{eq1}:
\(x=r\cos θ=6\cos(−\dfrac{5π}{6})=6(−\dfrac{\sqrt{3}}{2})=−3\sqrt{3}\)
and
\(y=r\sin θ=6\sin(−\dfrac{5π}{6})=6(−\dfrac{1}{2})=−3\).
Therefore this point can be represented as \((−3\sqrt{3},−3)\) in rectangular coordinates.
Convert \((−8,−8)\) into polar coordinates and \((4,\dfrac{2π}{3})\) into rectangular coordinates.
- Hint
-
Use Equation \ref{eq3} and Equation \ref{eq1}. Make sure to check the quadrant when calculating \(θ\).
- Answer
-
\((8\sqrt{2},\dfrac{5π}{4})\) and \((−2,2\sqrt{3})\)
The polar representation of a point is not unique. For example, the polar coordinates \((2,\dfrac{π}{3})\) and \((2,\dfrac{7π}{3})\) both represent the point \((1,\sqrt{3})\) in the rectangular system. Also, the value of r can be negative. Therefore, the point with polar coordinates \((−2,\dfrac{4π}{3})\) also represents the point \((1,\sqrt{3})\) in the rectangular system, as we can see by using Equation \ref{eq1}:
\[x=r\cos θ=−2\cos(\dfrac{4π}{3})=−2(−\dfrac{1}{2})=1 \nonumber \]
and
\[y=r\sin θ=−2\sin(\dfrac{4π}{3})=−2(−\dfrac{\sqrt{3}}{2})=\sqrt{3}. \nonumber \]
Every point in the plane has an infinite number of representations in polar coordinates. However, each point in the plane has only one representation in the rectangular coordinate system.
Note that the polar representation of a point in the plane also has a visual interpretation. In particular, \(r\) is the directed distance that the point lies from the origin, and \(θ\) measures the angle that the line segment from the origin to the point makes with the positive \(x\)-axis. Positive angles are measured in a counterclockwise direction and negative angles are measured in a clockwise direction. The polar coordinate system appears in Figure \(\PageIndex{2}\).
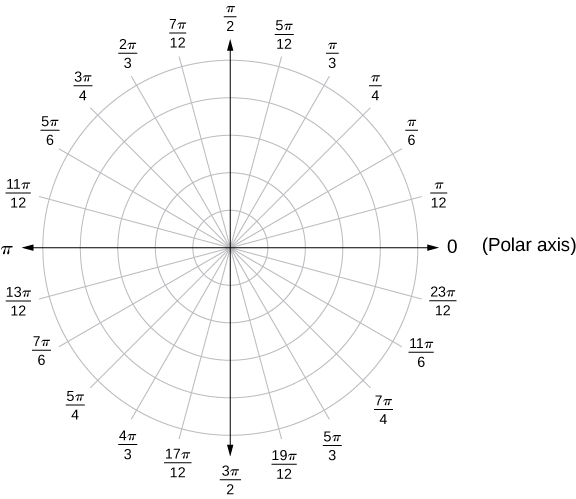
The line segment starting from the center of the graph going to the right (called the positive x-axis in the Cartesian system) is the polar axis. The center point is the pole, or origin, of the coordinate system, and corresponds to \(r=0\). The innermost circle shown in Figure \(\PageIndex{2}\) contains all points a distance of 1 unit from the pole, and is represented by the equation \(r=1\). Then \(r=2\) is the set of points 2 units from the pole, and so on. The line segments emanating from the pole correspond to fixed angles. To plot a point in the polar coordinate system, start with the angle. If the angle is positive, then measure the angle from the polar axis in a counterclockwise direction. If it is negative, then measure it clockwise. If the value of \(r\) is positive, move that distance along the terminal ray of the angle. If it is negative, move along the ray that is opposite the terminal ray of the given angle.
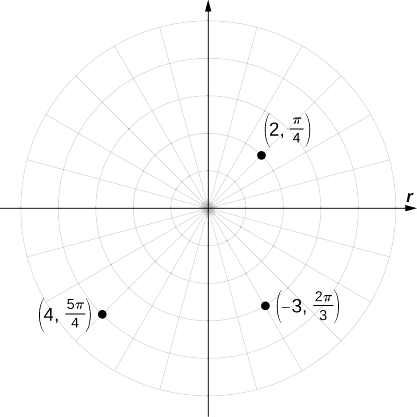
Plot each of the following points on the polar plane.
- \((2,\dfrac{π}{4})\)
- \((−3,\dfrac{2π}{3})\)
- \((4,\dfrac{5π}{4})\)
Solution
The three points are plotted in Figure \(\PageIndex{3}\).
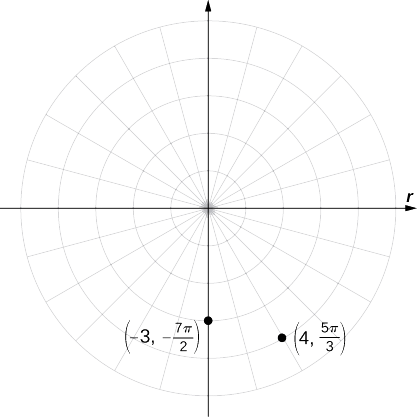
Plot \((4,\dfrac{5π}{3})\) and \((−3,−\dfrac{7π}{2})\) on the polar plane.
- Hint
-
Start with \(θ\), then use \(r\).
- Answer
-
Polar Curves
Now that we know how to plot points in the polar coordinate system, we can discuss how to plot curves. In the rectangular coordinate system, we can graph a function \(y=f(x)\) and create a curve in the Cartesian plane. In a similar fashion, we can graph a curve that is generated by a function \(r=f(θ)\).
The general idea behind graphing a function in polar coordinates is the same as graphing a function in rectangular coordinates. Start with a list of values for the independent variable (\(θ\) in this case) and calculate the corresponding values of the dependent variable \(r\). This process generates a list of ordered pairs, which can be plotted in the polar coordinate system. Finally, connect the points, and take advantage of any patterns that may appear. The function may be periodic, for example, which indicates that only a limited number of values for the independent variable are needed.
- Create a table with two columns. The first column is for \(θ\), and the second column is for \(r\).
- Create a list of values for \(θ\).
- Calculate the corresponding \(r\) values for each \(θ\).
- Plot each ordered pair \((r,θ)\) on the coordinate axes.
- Connect the points and look for a pattern.
Graph the curve defined by the function \(r=4\sin θ\). Identify the curve and rewrite the equation in rectangular coordinates.
Solution
Because the function is a multiple of a sine function, it is periodic with period \(2π\), so use values for \(θ\) between \(0\) and \(2π\). The result of steps 1–3 appear in the following table. Figure \(\PageIndex{4}\) shows the graph based on this table.
| \(θ\) | \(r=4\sin θ\) | \(θ\) | \(r=4\sin θ\) |
|---|---|---|---|
| 0 | 0 | \(π\) | 0 |
| \(\dfrac{π}{6}\) | 2 | \(\dfrac{7π}{6}\) | \(-2\) |
| \(\dfrac{π}{4}\) | \(2\sqrt{2}≈2.8\) | \(\dfrac{5π}{4}\) | \(−2\sqrt{2}≈−2.8\) |
| \(\dfrac{π}{3}\) | \(2\sqrt{3}≈3.4\) | \(\dfrac{4π}{3}\) | \(−2\sqrt{3}≈−3.4\) |
| \(\dfrac{π}{2}\) | 4 | \(\dfrac{3π}{2}\) | \(-4\) |
| \(\dfrac{2π}{3}\) | \(2\sqrt{3}≈3.4\) | \(\dfrac{5π}{3}\) | \(−2\sqrt{3}≈−3.4\) |
| \(\dfrac{3π}{4}\) | \(2\sqrt{2}≈2.8\) | \(\dfrac{7π}{4}\) | \(−2\sqrt{2}≈−2.8\) |
| \(\dfrac{5π}{6}\) | 2 | \(\dfrac{11π}{6}\) | −2 |
| \(2π\) | 0 |
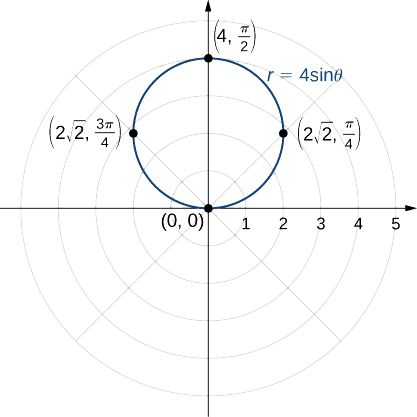
This is the graph of a circle. The equation \(r=4\sin θ\) can be converted into rectangular coordinates by first multiplying both sides by \(r\). This gives the equation \(r^2=4r\sin θ.\) Next use the facts that \(r^2=x^2+y^2\) and \(y=r\sin θ\). This gives \(x^2+y^2=4y\). To put this equation into standard form, subtract \(4y\) from both sides of the equation and complete the square:
\[\begin{align*} x^2+y^2−4y &= 0 \\[4pt] x^2+(y^2−4y) &= 0 \\[4pt] x^2+(y^2−4y+4) &= 0+4 \\[4pt] x^2+(y−2)^2&=4 \end{align*}\]
This is the equation of a circle with radius 2 and center \((0,2)\) in the rectangular coordinate system.
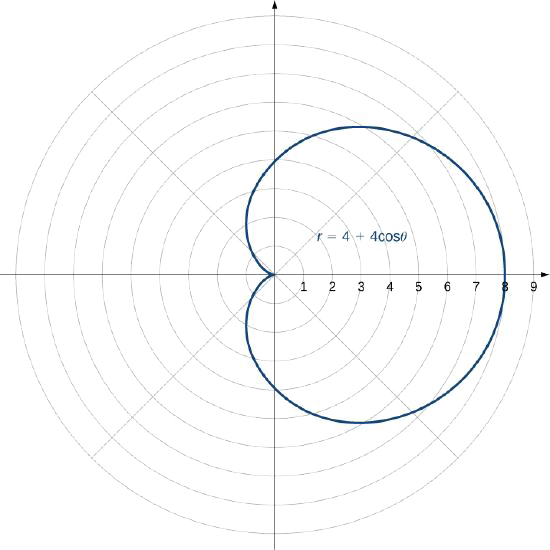
Create a graph of the curve defined by the function \(r=4+4\cos θ\).
- Hint
-
Follow the problem-solving strategy for creating a graph in polar coordinates.
- Answer
-
The name of this shape is a cardioid, which we will study further later in this section.
The graph in Example \(\PageIndex{3}\) was that of a circle. The equation of the circle can be transformed into rectangular coordinates using the coordinate transformation formulas in Equation \ref{eq1}. Example \(\PageIndex{4}\) gives some more examples of functions for transforming from polar to rectangular coordinates.
Rewrite each of the following equations in rectangular coordinates and identify the graph.
- \(θ=\dfrac{π}{3}\)
- \(r=3\)
- \(r=6\cos θ−8\sin θ\)
Solution:
a. Take the tangent of both sides. This gives \(\tan θ=\tan(π/3)=\sqrt{3}\). Since \(\tan θ=y/x\) we can replace the left-hand side of this equation by \(y/x\). This gives \(y/x=\sqrt{3}\), which can be rewritten as \(y=x\sqrt{3}\). This is the equation of a straight line passing through the origin with slope \(\sqrt{3}\). In general, any polar equation of the form \(θ=K\) represents a straight line through the pole with slope equal to \(\tan K\).
b. First, square both sides of the equation. This gives \(r^2=9.\) Next replace \(r^2\) with \(x^2+y^2\). This gives the equation \(x^2+y^2=9\), which is the equation of a circle centered at the origin with radius 3. In general, any polar equation of the form \(r=k\) where k is a positive constant represents a circle of radius k centered at the origin. (Note: when squaring both sides of an equation it is possible to introduce new points unintentionally. This should always be taken into consideration. However, in this case we do not introduce new points. For example, \((−3,\dfrac{π}{3})\) is the same point as \((3,\dfrac{4π}{3})\).)
c. Multiply both sides of the equation by \(r\). This leads to \(r^2=6r\cos θ−8r\sin θ\). Next use the formulas
\(r^2=x^2+y^2,\,x=r\cos θ,\,y=r\sin θ.\)
This gives
\(r^2=6(r\cos θ)−8(r\sin θ)\)
\(x^2+y^2=6x−8y.\)
To put this equation into standard form, first move the variables from the right-hand side of the equation to the left-hand side, then complete the square.
\(x^2+y^2=6x−8y\)
\(x^2−6x+y^2+8y=0\)
\((x^2−6x)+(y^2+8y)=0\)
\((x^2−6x+9)+(y^2+8y+16)=9+16\)
\((x−3)^2+(y+4)^2=25.\)
This is the equation of a circle with center at \((3,−4)\) and radius 5. Notice that the circle passes through the origin since the center is 5 units away.
Rewrite the equation \(r=\sec θ\tan θ\) in rectangular coordinates and identify its graph.
- Hint
-
Convert to sine and cosine, then multiply both sides by cosine.
- Answer
-
\(y=x^2\), which is the equation of a parabola opening upward.
We have now seen several examples of drawing graphs of curves defined by polar equations. A summary of some common curves is given in the tables below. In each equation, a and b are arbitrary constants.
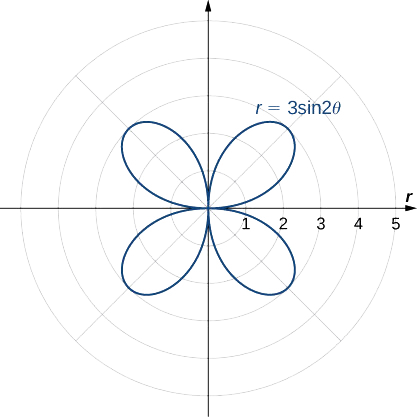
A cardioid is a special case of a limaçon (pronounced “lee-mah-son”), in which \(a=b\) or \(a=−b\). The rose is a very interesting curve. Notice that the graph of \(r=3\sin 2θ\) has four petals. However, the graph of \(r=3\sin 3θ\) has three petals as shown.
If the coefficient of \(θ\) is even, the graph has twice as many petals as the coefficient. If the coefficient of \(θ\) is odd, then the number of petals equals the coefficient. You are encouraged to explore why this happens. Even more interesting graphs emerge when the coefficient of \(θ\) is not an integer. For example, if it is rational, then the curve is closed; that is, it eventually ends where it started (Figure \(\PageIndex{8a}\)). However, if the coefficient is irrational, then the curve never closes (Figure \(\PageIndex{8b}\)). Although it may appear that the curve is closed, a closer examination reveals that the petals just above the positive x axis are slightly thicker. This is because the petal does not quite match up with the starting point.
Since the curve defined by the graph of \(r=3\sin(πθ)\) never closes, the curve depicted in Figure \(\PageIndex{8b}\) is only a partial depiction. In fact, this is an example of a space-filling curve. A space-filling curve is one that in fact occupies a two-dimensional subset of the real plane. In this case the curve occupies the circle of radius 3 centered at the origin.
Recall the chambered nautilus introduced in the chapter prelude. This creature displays a spiral when half the outer shell is cut away. It is possible to describe a spiral using rectangular coordinates. Figure \(\PageIndex{9}\) shows a spiral in rectangular coordinates. How can we describe this curve mathematically?
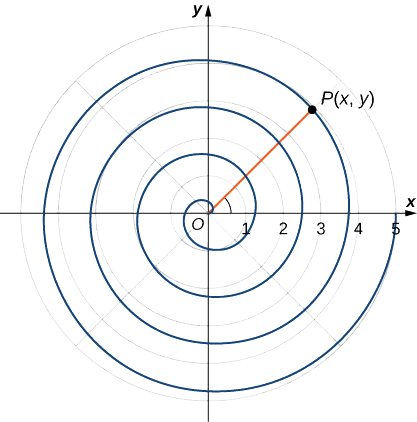
Solution
As the point P travels around the spiral in a counterclockwise direction, its distance d from the origin increases. Assume that the distance d is a constant multiple k of the angle \(θ\) that the line segment OP makes with the positive x-axis. Therefore \(d(P,O)=kθ\), where \(O\) is the origin. Now use the distance formula and some trigonometry:
\(d(P,O)=kθ\)
\(\sqrt{(x−0)^2+(y−0)^2}=k\arctan(\dfrac{y}{x})\)
\(\sqrt{x^2+y^2}=k\arctan(\dfrac{y}{x})\)
\(\arctan(\dfrac{y}{x})=\dfrac{\sqrt{x^2+y^2}}{k}\)
\(y=x\tan(\dfrac{\sqrt{x^2+y^2}}{k})\).
Although this equation describes the spiral, it is not possible to solve it directly for either x or y. However, if we use polar coordinates, the equation becomes much simpler. In particular, \(d(P,O)=r\), and \(θ\) is the second coordinate. Therefore the equation for the spiral becomes \(r=kθ\). Note that when \(θ=0\) we also have \(r=0\), so the spiral emanates from the origin. We can remove this restriction by adding a constant to the equation. Then the equation for the spiral becomes \(r=a+kθ\) for arbitrary constants \(a\) and \(k\). This is referred to as an Archimedean spiral, after the Greek mathematician Archimedes.
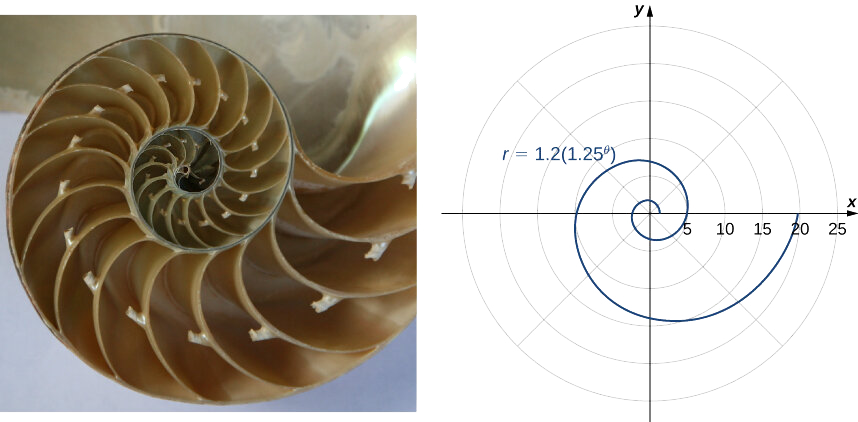
Another type of spiral is the logarithmic spiral, described by the function \(r=a⋅b^θ\). A graph of the function \(r=1.2(1.25^θ)\) is given in Figure \(\PageIndex{10}\). This spiral describes the shell shape of the chambered nautilus.
Suppose a curve is described in the polar coordinate system via the function \(r=f(θ)\). Since we have conversion formulas from polar to rectangular coordinates given by
\[x=r\cos θ \nonumber \]
\[y=r\sin θ \nonumber \],
it is possible to rewrite these formulas using the function
\[x=f(θ)\cos θ \nonumber \]
\[y=f(θ)\sin θ. \nonumber \]
This step gives a parameterization of the curve in rectangular coordinates using \(θ\) as the parameter. For example, the spiral formula \(r=a+bθ\) from Figure becomes
\[x=(a+bθ)\cos θ \nonumber \]
\[y=(a+bθ)\sin θ. \nonumber \]
Letting \(θ\) range from \(−∞\) to \(∞\) generates the entire spiral.
Symmetry in Polar Coordinates
When studying symmetry of functions in rectangular coordinates (i.e., in the form \(y=f(x)\)), we talk about symmetry with respect to the y-axis and symmetry with respect to the origin. In particular, if \(f(−x)=f(x)\) for all \(x\) in the domain of \(f\), then \(f\) is an even function and its graph is symmetric with respect to the y-axis. If \(f(−x)=−f(x)\) for all x in the domain of \(f\), then f is an odd function and its graph is symmetric with respect to the origin. By determining which types of symmetry a graph exhibits, we can learn more about the shape and appearance of the graph. Symmetry can also reveal other properties of the function that generates the graph. Symmetry in polar curves works in a similar fashion.
Consider a curve generated by the function \(r=f(θ)\) in polar coordinates.
- The curve is symmetric about the polar axis if for every point \((r,θ)\) on the graph, the point \((r,−θ)\) is also on the graph. Similarly, the equation \(r=f(θ)\) is unchanged by replacing \(θ\) with \(−θ\).
- The curve is symmetric about the pole if for every point \((r,θ)\) on the graph, the point \((r,π+θ)\) is also on the graph. Similarly, the equation \(r=f(θ)\) is unchanged when replacing \(r\) with \(−r\), or \(θ\) with \(π+θ.\)
- The curve is symmetric about the vertical line \(θ=\dfrac{π}{2}\) if for every point \((r,θ)\) on the graph, the point \((r,π−θ)\) is also on the graph. Similarly, the equation \(r=f(θ)\) is unchanged when \(θ\) is replaced by \(π−θ\).
The following table shows examples of each type of symmetry.
Find the symmetry of the rose defined by the equation \(r=3\sin(2θ)\) and create a graph.
Solution
Suppose the point \((r,θ)\) is on the graph of \(r=3\sin(2θ).\)
i. To test for symmetry about the polar axis, first try replacing \(θ\) with \(−θ\). This gives \(r=3\sin(2(−θ))=−3\sin(2θ)\). Since this changes the original equation, this test is not satisfied. However, returning to the original equation and replacing \(r\) with \(−r\) and \(θ\) with \(π−θ\) yields
\[ \begin{align*} −r&=3\sin(2(π−θ)) \\[4pt] −r &=3\sin(2π−2θ) \\[4pt] −r &=3\sin(−2θ) \\[4pt] −r &=−3\sin2θ. \end{align*}\]
Multiplying both sides of this equation by \(−1\) gives \(r=3\sin 2θ\), which is the original equation. This demonstrates that the graph is symmetric with respect to the polar axis.
ii. To test for symmetry with respect to the pole, first replace \(r\) with \(−r\), which yields \(−r=3\sin(2θ)\). Multiplying both sides by \(−1\) gives \(r=−3\sin(2θ)\), which does not agree with the original equation. Therefore the equation does not pass the test for this symmetry. However, returning to the original equation and replacing \(θ\) with \(θ+π\) gives
\[ \begin{align*} r&=3\sin(2(θ+π)) \\[4pt] &=3\sin(2θ+2π) \\[4pt] &=3(\sin 2θ \cos 2π + \cos 2θ \sin 2π) \\[4pt] &=3\sin 2θ. \end{align*}\]
Since this agrees with the original equation, the graph is symmetric about the pole.
iii. To test for symmetry with respect to the vertical line \(θ=\dfrac{π}{2}\), first replace both \(r\) with \(−r\) and \(θ\) with \(−θ\).
\[ \begin{align*} −r &=3\sin(2(−θ)) \\[4pt] −r &=3\sin(−2θ) \\[4pt] −r &=−3 \sin 2θ. \end{align*}\]
Multiplying both sides of this equation by \(−1\) gives \(r=3\sin 2θ\), which is the original equation. Therefore the graph is symmetric about the vertical line \(θ=\dfrac{π}{2}\).
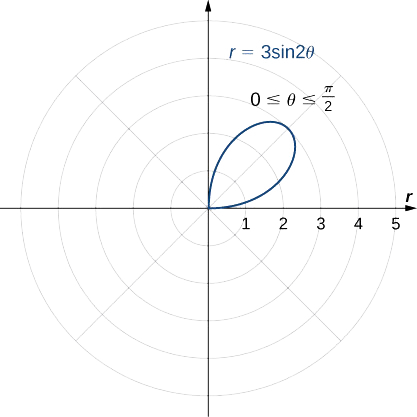
This graph has symmetry with respect to the polar axis, the origin, and the vertical line going through the pole. To graph the function, tabulate values of \(θ\) between \(0\) and \(π/2\) and then reflect the resulting graph.
| \(θ\) | \(r=3\sin(2θ)\) |
|---|---|
| 0 | 0 |
| \(\dfrac{π}{6}\) | \(\dfrac{3\sqrt{3}}{2}≈2.6\) |
| \(\dfrac{π}{4}\) | 3 |
| \(\dfrac{π}{3}\) | \(\dfrac{3\sqrt{3}}{2}≈2.6\) |
| \(\dfrac{π}{2}\) | 0 |
This gives one petal of the rose, as shown in the following graph.
Reflecting this image into the other three quadrants gives the entire graph as shown.
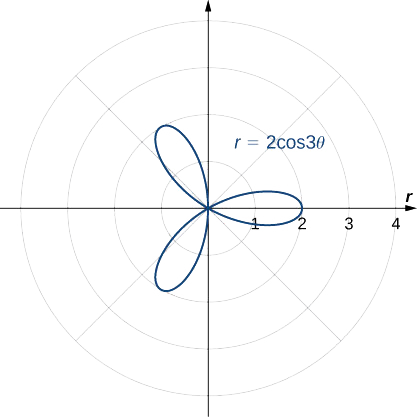
Determine the symmetry of the graph determined by the equation \(r=2\cos(3θ)\) and create a graph.
- Hint
-
Use Note.
- Answer
-
Symmetric with respect to the polar axis.
Key Concepts
- The polar coordinate system provides an alternative way to locate points in the plane.
- Convert points between rectangular and polar coordinates using the formulas
\[x=r\cos θ \text{ and } y=r\sin θ \nonumber \]
and
\[r=\sqrt{x^2+y^2} \text{ and} \tan θ=\dfrac{y}{x}. \nonumber \]
- To sketch a polar curve from a given polar function, make a table of values and take advantage of periodic properties.
- Use the conversion formulas to convert equations between rectangular and polar coordinates.
- Identify symmetry in polar curves, which can occur through the pole, the horizontal axis, or the vertical axis.
Glossary
- angular coordinate
- \(θ\) the angle formed by a line segment connecting the origin to a point in the polar coordinate system with the positive radial \(x\)-axis, measured counterclockwise
- cardioid
- a plane curve traced by a point on the perimeter of a circle that is rolling around a fixed circle of the same radius; the equation of a cardioid is \(r=a(1+\sin θ)\) or \(r=a(1+\cos θ)\)
- limaçon
- the graph of the equation \(r=a+b\sin θ\) or \(r=a+b\cos θ.\) If \(a=b\) then the graph is a cardioid
- polar axis
- the horizontal axis in the polar coordinate system corresponding to \(r≥0\)
- polar coordinate system
- a system for locating points in the plane. The coordinates are \(r\), the radial coordinate, and \(θ\), the angular coordinate
- polar equation
- an equation or function relating the radial coordinate to the angular coordinate in the polar coordinate system
- pole
- the central point of the polar coordinate system, equivalent to the origin of a Cartesian system
- radial coordinate
- \(r\) the coordinate in the polar coordinate system that measures the distance from a point in the plane to the pole
- rose
- graph of the polar equation \(r=a\cos 2θ\) or \(r=a\sin 2θ\)for a positive constant \(a\)
- space-filling curve
- a curve that completely occupies a two-dimensional subset of the real plane