
6.9: Curvilinear Coordinates




- Last updated
- Sep 4, 2024
- Save as PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
In order to study solutions of the wave equation, the heat equation, or even Schrödinger’s equation in different geometries, we need to see how differential operators, such as the Laplacian, appear in these geometries. The most common coordinate systems arising in physics are polar coordinates, cylindrical coordinates, and spherical coordinates. These reflect the common geometrical symmetries often encountered in physics.
In such systems it is easier to describe boundary conditions and to make use of these symmetries. For example, specifying that the electric potential is 10.0 V on a spherical surface of radius one, we would say ϕ(x,y,z)=10 for x2+y2+z2=1. However, if we use spherical coordinates, (r,θ,ϕ), then we would say ϕ(r,θ,ϕ)=10 for r=1, or ϕ(1,θ,ϕ)=10. This is a much simpler representation of the boundary condition.
However, this simplicity in boundary conditions leads to a more complicated looking partial differential equation in spherical coordinates. In this section we will consider general coordinate systems and how the differential operators are written in the new coordinate systems. This is a more general approach than that taken earlier in the chapter. For a more modern and elegant approach, one can use differential forms.
We begin by introducing the general coordinate transformations between Cartesian coordinates and the more general curvilinear coordinates. Let the Cartesian coordinates be designated by (x1,x2,x3) and the new coordinates by (u1,u2,u3). We will assume that these are related through the transformations
x1=x1(u1,u2,u3)x2=x2(u1,u2,u3)x3=x3(u1,u2,u3)
Thus, given the curvilinear coordinates (u1,u2,u3) for a specific point in space, we can determine the Cartesian coordinates, (x1,x2,x3), of that point. We will assume that we can invert this transformation: Given the Cartesian coordinates, one can determine the corresponding curvilinear coordinates.
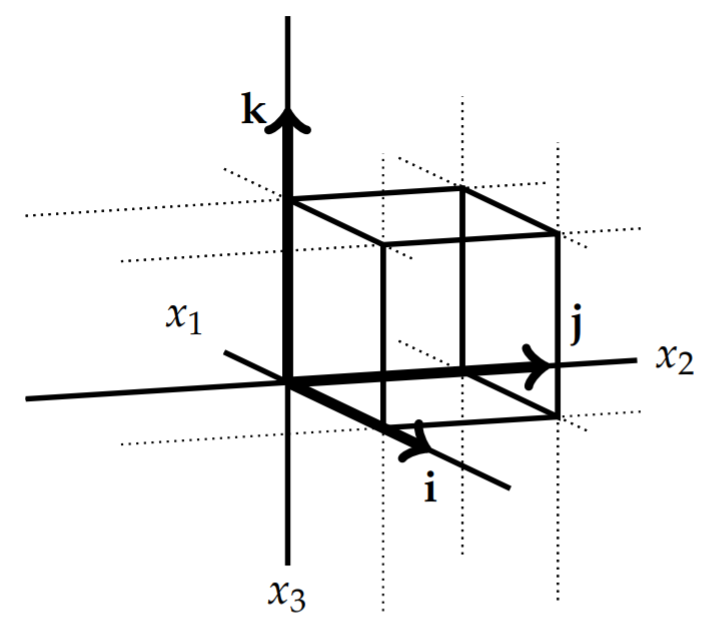
In the Cartesian system we can assign an orthogonal basis, {i,j,k}. As a particle traces out a path in space, one locates its position by the coordinates (x1,x2,x3). Picking x2 and x3 constant, the particle lies on the curve x1= value of the x1 coordinate. This line lies in the direction of the basis vector i. We can do the same with the other coordinates and essentially map out a grid in three dimensional space as sown in Figure 6.9.1. All of the xi− curves intersect at each point orthogonally and the basis vectors {i,j,k} lie along the grid lines and are mutually orthogonal. We would like to mimic this construction for general curvilinear coordinates. Requiring the orthogonality of the resulting basis vectors leads to orthogonal curvilinear coordinates.
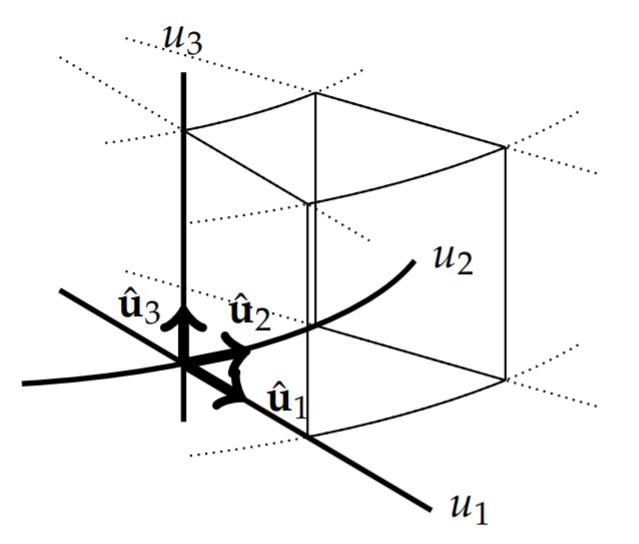
As for the Cartesian case, we consider u2 and u3 constant. This leads to a curve parametrized by u1:r=x1(u1)i+x2(u1)j+x3(u1)k. We call this the u1-curve. Similarly, when u1 and u3 are constant we obtain a u2-curve and for u1 and u2 constant we obtain a u3-curve. We will assume that these curves intersect such that each pair of curves intersect orthogonally as seen in Figure 6.9.2. Furthermore, we will assume that the unit tangent vectors to these curves form a right handed system similar to the {i,j,k} systems for Cartesian coordinates. We will denote these as {ˆu1,ˆu2,ˆu3}.
We can determine these tangent vectors from the coordinate transformations. Consider the position vector as a function of the new coordinates,
r(u1,u2,u3)=x1(u1,u2,u3)i+x2(u1,u2,u3)j+x3(u1,u2,u3)k.
Then, the infinitesimal change in position is given by
dr=∂r∂u1du1+∂r∂u2du2+∂r∂u3du3=3∑i=1∂r∂uidui.
We note that the vectors ∂r∂ui are tangent to the ui-curves. Thus, we define the unit tangent vectors
ˆui=∂r∂ui|∂r∂ui|.
Solving for the original tangent vector, we have
∂r∂ui=hiˆui,
where
hi≡|∂r∂ui|.
The hi ’s are called the scale factors for the transformation. The infinitesimal change in position in the new basis is then given by
dr=3∑i=1hiuiˆui.
The scale factors, hi≡|∂r∂ui|.
Determine the scale factors for the polar coordinate transformation.
Solution
The transformation for polar coordinates is
x=rcosθ,y=rsinθ.
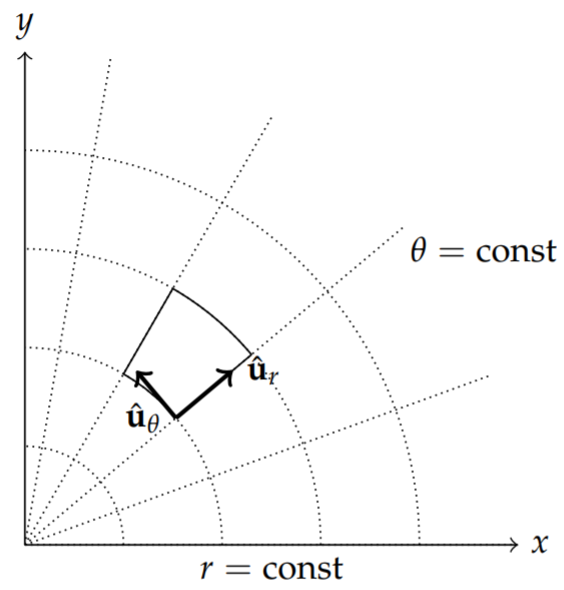
Here we note that x1=x,x2=y,u1=r, and u2=θ. The u1-curves are curves with θ= const. Thus, these curves are radial lines. Similarly, the u2-curves have r= const. These curves are concentric circles about the origin as shown in Figure 6.9.3.
The unit vectors are easily found. We will denote them by ˆur and ˆuθ. We can determine these unit vectors by first computing ∂r∂ui. Let
r=x(r,θ)i+y(r,θ)j=rcosθi+rsinθj.
Then,
∂r∂r=cosθi+sinθj∂r∂θ=−rsinθi+rcosθj.
The first vector already is a unit vector. So,
ˆur=cosθi+sinθj.
The second vector has length r since |−rsinθi+rcosθj|=r. Dividing ∂r∂θ by r, we have
ˆuθ=−sinθi+cosθj.
We can see these vectors are orthogonal (ˆur⋅ˆuθ=0) and form a right hand system. That they form a right hand system can be seen by either drawing the vectors, or computing the cross product,
(cosθi+sinθj)×(−sinθi+cosθj)=cos2θi×j−sin2θj×i=k.
Since
∂r∂r=ˆur,∂r∂θ=rˆuθ,
The scale factors are hr=1 and hθ=r.
Once we know the scale factors, we have that
dr=3∑i=1hiduiˆui.
The infinitesimal arclength is then given by the Euclidean line element
ds2=dr⋅dr=3∑i=1h2idu2i
when the system is orthogonal. The h2i are referred to as the metric coefficients.
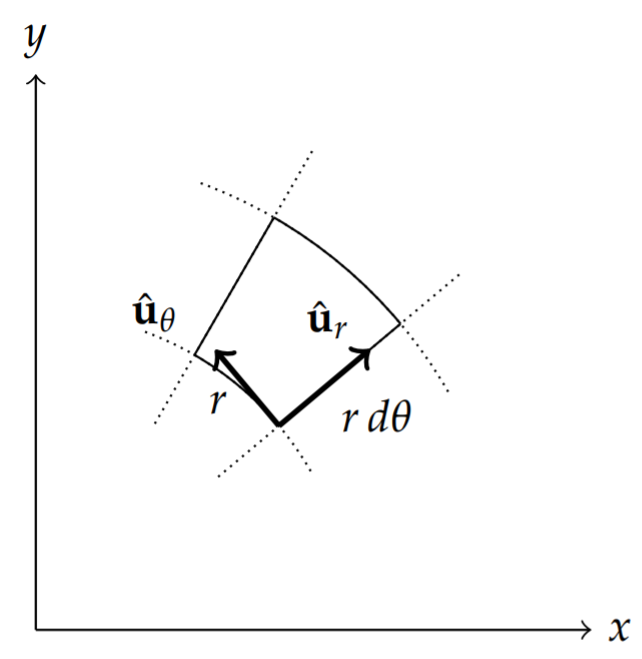
Verify that dr=drˆur+rdθˆuθ directly from r=rcosθi+rsinθj and obtain the Euclidean line element for polar coordinates.
Solution
We begin by computing
dr=d(rcosθi+rsinθj)=(cosθi+sinθj)dr+r(−sinθi+cosθj)dθ=drˆur+rdθˆuθ.
This agrees with the form dr=∑3i=1hiduiˆui when the scale factors for polar coordinates are inserted.
The line element is found as
ds2=dr⋅dr=(drˆur+rdθˆuθ)⋅(drˆur+rdθˆuθ)=dr2+r2dθ2.
This is the Euclidean line element in polar coordinates.
Also, along the ui-curves,
dr=hiduiˆui, (no summation).
This can be seen in Figure 6.9.5 by focusing on the u1 curve. Along this curve, u2 and u3 are constant. So, du2=0 and du3=0. This leaves dr=h1du1ˆu1 along the u1-curve. Similar expressions hold along the other two curves.
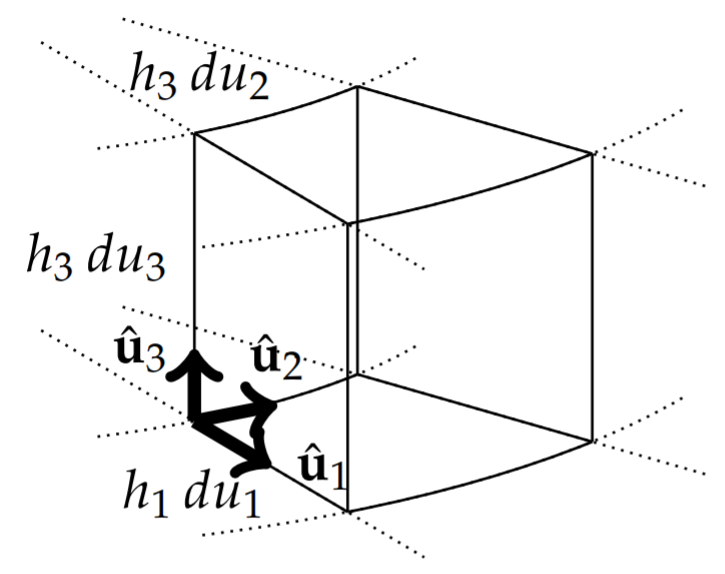
We can use this result to investigate infinitesimal volume elements for general coordinate systems as shown in Figure 6.9.5. At a given point (u1,u2,u3) we can construct an infinitesimal parallelepiped of sides hidui, i=1,2,3. This infinitesimal parallelepiped has a volume of size
dV=|∂r∂u1⋅∂r∂u2×∂r∂u3|du1du2du3.
The triple scalar product can be computed using determinants and the resulting determinant is call the Jacobian, and is given by
J=|∂(x1,x2,x3)∂(u1,u2,u3)|=|∂r∂u1⋅∂r∂u2×∂r∂u3|=|∂x1∂u1∂x2∂u1∂x3∂u1∂x1∂u2∂x2∂u2∂x3∂u2∂x1∂u3∂x2∂u3∂x3∂u3|.
Therefore, the volume element can be written as
dV=Jdu1du2du3=|∂(x1,x2,x3)∂(u1,u2,u3)|du1du2du3.
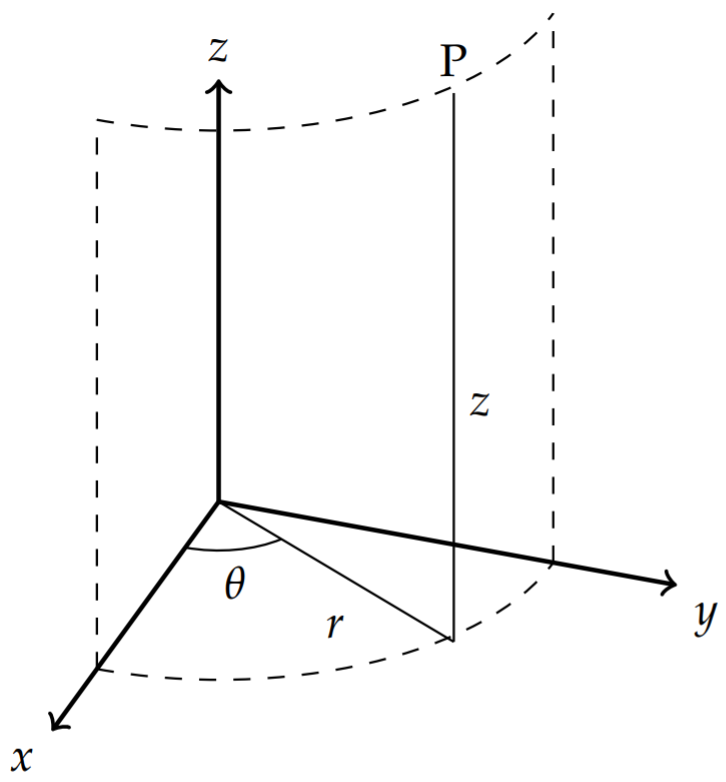
Determine the volume element for cylindrical coordinates (r,θ,z), given by
x=rcosθ,y=rsinθ,z=z.
Solution
Here, we have (u1,u2,u3)=(r,θ,z) as displayed in Figure 6.9.6. Then, the Jacobian is given by
J=∣∂(x,y,z)∂(r,θ,z)∣=|∂x∂r∂y∂r∂z∂r∂x∂θ∂y∂θ∂z∂θ∂x∂z∂y∂z∂z∂z|=|cosθsinθ0−rsinθrcosθ0001|=r
Thus, the volume element is given as
dV=rdrdθdz.
This result should be familiar from multivariate calculus.
Another approach is to consider the geometry of the infinitesimal volume element. The directed edge lengths are given by dsi=hiduiˆui as seen in Figure 6.9.2. The infinitesimal area element of for the face in direction ˆuk is found from a simple cross product,
dAk=dsi×dsj=hihjduidujˆui׈uj.
Since these are unit vectors, the areas of the faces of the infinitesimal volumes are dAk=hihjduiduj.
The infinitesimal volume is then obtained as
dV=|dsk⋅dAk|=hihjhkduidujduk|ˆui⋅(ˆuk׈uj)|.
Thus, dV=h1h2h3du1du1du3. Of course, this should not be a surprise since
J=|∂r∂u1⋅∂r∂u2×∂r∂u3|=|h1ˆu1⋅h2ˆu2×h3ˆu3|=h1h2h3.
For polar coordinates, determine the infinitesimal area element.
Solution
In an earlier example, we found the scale factors for polar coordinates as hr=1 and hθ=r. Thus, dA=hrhθdrdθ=rdrdθ. Also, the last example for cylindrical coordinates will yield similar results if we already know the scales factors without having to compute the Jacobian directly. Furthermore, the area element perpendicular to the z-coordinate gives the polar coordinate system result.
Next we will derive the forms of the gradient, divergence, and curl in curvilinear coordinates using several of the identities in section ??. The results are given here for quick reference.
Gradient, divergence and curl in orthogonal curvilinear coordinates.
∇ϕ=3∑i=1ˆuihi∂ϕ∂ui=ˆu1h1∂ϕ∂u1+ˆu2h2∂ϕ∂u2+ˆu3h3∂ϕ∂u3⋅∇⋅F=1h1h2h3(∂∂u1(h2h3F1)+∂∂u2(h1h3F2)+∂∂u3(h1h2F3))∇×F=1h1h2h3|h1ˆu1h2ˆu2h3ˆu3∂∂u1∂∂u2∂∂u3F1h1F2h2F3h3|.∇2ϕ=1h1h2h3(∂∂u1(h2h3h1∂ϕ∂u1)+∂∂u2(h1h3h2∂ϕ∂u2)+∂∂u3(h1h2h3∂ϕ∂u3))
Derivation of the gradient form.
We begin the derivations of these formulae by looking at the gradient, ∇ϕ, of the scalar function ϕ(u1,u2,u3). We recall that the gradient operator appears in the differential change of a scalar function,
dϕ=∇ϕ⋅dr=3∑i=1∂ϕ∂uidui.
Since
dr=3∑i=1hiduiˆui
we also have that
dϕ=∇ϕ⋅dr=3∑i=1(∇ϕ)ihidui.
Comparing these two expressions for dϕ, we determine that the components of the del operator can be written as
(∇ϕ)i=1hi∂ϕ∂ui
and thus the gradient is given by
∇ϕ=ˆu1h1∂ϕ∂u1+ˆu2h2∂ϕ∂u2+ˆu3h3∂ϕ∂u3.
Derivation of the divergence form.
Next we compute the divergence,
∇⋅F=3∑i=1∇⋅(Fiˆui).
We can do this by computing the individual terms in the sum. We will compute ∇⋅(F1ˆu1).
Using Equation (???), we have that
∇ui=ˆuihi.
Then
∇u2×∇u3=ˆu2׈u3h2h3=ˆu1h2h3
Solving for ˆu1, gives
ˆu1=h2h3∇u2×∇u3.
Inserting this result into ∇⋅(F1ˆu1) and using the vector identity 2c from section ??,
∇⋅(fA)=f∇⋅A+A⋅∇f,
we have
∇⋅(F1ˆu1)=∇⋅(F1h2h3∇u2×∇u3)=∇(F1h2h3)⋅∇u2×∇u3+F1h2h2∇⋅(∇u2×∇u3)
The second term of this result vanishes by vector identity 3c,
∇⋅(∇f×∇g)=0.
Since ∇u2×∇u3=ˆ11h2h3, the first term can be evaluated as
∇⋅(F1ˆu1)=∇(F1h2h3)⋅ˆu1h2h3=1h1h2h3∂∂u1(F1h2h3).
Similar computations can be carried out for the remaining components, leading to the sought expression for the divergence in curvilinear coordinates:
∇⋅F=1h1h2h3(∂∂u1(h2h3F1)+∂∂u2(h1h3F2)+∂∂u3(h1h2F3)).
Write the divergence operator in cylindrical coordinates.
Solution
In this case we have
∇⋅F=1hrhθhz(∂∂r(hθhzFr)+∂∂θ(hrhzFθ)+∂∂θ(hrhθFz))=1r(∂∂r(rFr)+∂∂θ(Fθ)+∂∂θ(rFz))=1r∂∂r(rFr)+1r∂∂θ(Fθ)+∂∂θ(Fz)
We now turn to the curl operator. In this case, we need to evaluate
∇×F=3∑i=1∇×(Fiˆui)
Again we focus on one term, ∇×(F1ˆu1). Using the vector identity 2e,
∇×(fA)=f∇×A−A×∇f,
we have
∇×(F1ˆu1)=∇×(F1h1∇u1)=F1h1∇×∇u1−∇(F1h1)×∇u1
The curl of the gradient vanishes, leaving
∇×(F1ˆu1)=∇(F1h1)×∇u1.
Since ∇u1=ˆu1h1, we have
∇×(F1ˆu1)=∇(F1h1)׈u1h1=(3∑i=1ˆuihi∂(F1h1)∂ui)׈u1h1=ˆu2h3h1∂(F1h1)∂u3−ˆu3h1h2∂(F1h1)∂u2.
The other terms can be handled in a similar manner. The overall result is that
∇×F=ˆu1h2h3(∂(h3F3)∂u2−∂(h2F2)∂u3)+ˆu2h1h3(∂(h1F1)∂u3−∂(h3F3)∂u1)+ˆu3h1h2(∂(h2F2)∂u1−∂(h1F1)∂u2)
This can be written more compactly as
∇×F=1h1h2h3|h1ˆu1h2ˆu2h3ˆu3∂∂u1∂∂u2∂∂u3F1h1F2h2F3h3|
Write the curl operator in cylindrical coordinates.
Solution
∇×F=1r|ˆerrˆeθˆez∂∂r∂∂θ∂∂zFrrFθFz|=(1r∂Fz∂θ−∂Fθ∂z)ˆer+(∂Fr∂z−∂Fz∂r)ˆeθ+1r(∂(rFθ)∂r−∂Fr∂θ)ˆez.
Finally, we turn to the Laplacian. In the next chapter we will solve higher dimensional problems in various geometric settings such as the wave equation, the heat equation, and Laplace’s equation. These all involve knowing how to write the Laplacian in different coordinate systems. Since ∇2ϕ=∇⋅∇ϕ, we need only combine the results from Equations (???) and (???) for the gradient and the divergence in curvilinear coordinates. This is straight forward and gives
∇2ϕ=1h1h2h3(∂∂u1(h2h3h1∂ϕ∂u1)+∂∂u2(h1h3h2∂ϕ∂u2)+∂∂u3(h1h2h3∂ϕ∂u3)).
The results of rewriting the standard differential operators in cylindrical and spherical coordinates are shown in Problems ?? and ??. In particular, the Laplacians are given as
∇2f=1r∂∂r(r∂f∂r)+1r2∂2f∂θ2+∂2f∂z2.
∇2f=1ρ2∂∂ρ(ρ2∂f∂ρ)+1ρ2sinθ∂∂θ(sinθ∂f∂θ)+1ρ2sin2θ∂2f∂ϕ2.